Active Collaborative Visual SLAM exploiting ORB Features

0

Sign in to get full access
Overview
This paper presents a novel approach to collaborative visual SLAM (Simultaneous Localization and Mapping) that leverages ORB features - a type of visual feature descriptor. The key ideas are:
- Active Collaboration: The system actively coordinates the movement of multiple robots to efficiently explore and map an environment.
- ORB Features: The use of ORB features, which are computationally efficient and robust, enables fast and accurate visual SLAM.
- Decentralized Architecture: The system is decentralized, allowing multiple robots to collaborate without a centralized controller.
Plain English Explanation
Imagine a group of robots exploring a building and working together to create a detailed map of the entire space. This is what the researchers have developed - a way for multiple robots to actively coordinate their movements to efficiently explore and map an environment.
The robots use a visual technique called ORB features to quickly and accurately identify landmarks and their locations. ORB features are a type of visual descriptor that can be computed efficiently, allowing the robots to perform visual SLAM (Simultaneous Localization and Mapping) in real-time.
Importantly, the system is decentralized, meaning there is no single controller directing the robots. Instead, the robots communicate with each other and make decisions collaboratively. This makes the system more scalable and robust, as it can continue functioning even if one robot fails.
By having the robots actively work together and leverage efficient visual features, the researchers have created a SLAM system that can quickly and accurately map large environments using a team of robots. This could be useful for applications like search and rescue, construction site monitoring, or even space exploration.
Technical Explanation
The paper introduces an "Active Collaborative Visual SLAM exploiting ORB Features" system, which coordinates the movements of multiple robots to efficiently explore and map an environment. The key technical elements include:
-
Active Collaboration: The system actively plans the robots' movements to maximize the information gained about the environment. This is achieved by formulating an optimization problem that balances exploration of unknown areas and exploitation of known landmarks.
-
ORB Features: The system uses ORB (Oriented FAST and Rotated BRIEF) features, a type of computationally efficient visual descriptor, for fast and accurate visual SLAM. ORB features are robust to changes in viewpoint and illumination, making them well-suited for real-world environments.
-
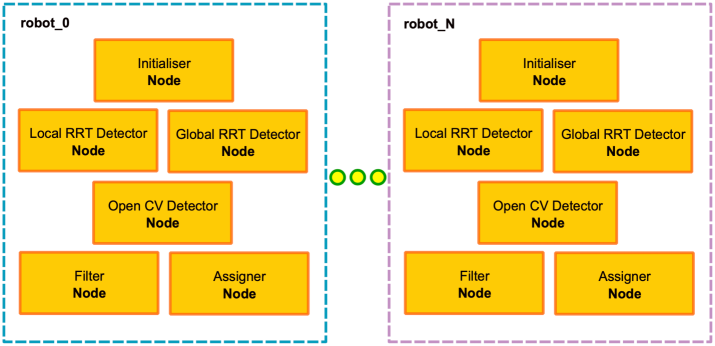
Decentralized Architecture: The system is designed in a decentralized manner, with each robot maintaining its own map and communicating with its neighbors to share information and coordinate actions. This allows the system to scale to large teams of robots without a single point of failure.
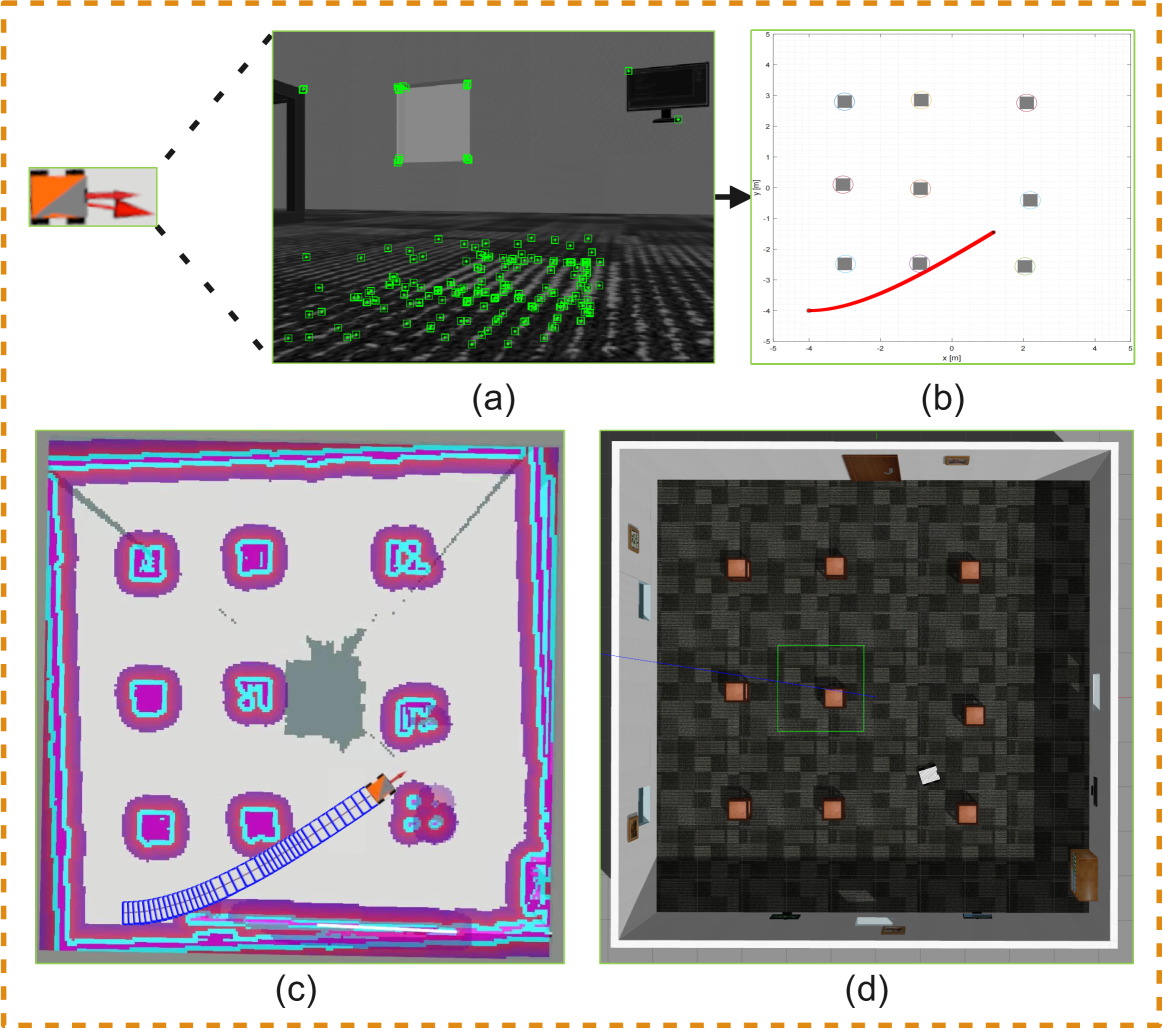
The paper presents experiments in simulated and real-world environments, demonstrating the system's ability to quickly and accurately map large spaces using a team of robots. The results show that the active collaboration and use of ORB features lead to improved mapping performance compared to traditional approaches.
Critical Analysis
The paper presents a promising approach to collaborative visual SLAM, but there are a few potential limitations and areas for further research:
-
Reliance on ORB Features: While ORB features are efficient, they may not be as descriptive as other visual features, such as SIFT or SURF. The authors could explore the use of more advanced feature descriptors and their impact on mapping accuracy.
-
Scalability to Large Environments: The experiments were conducted in relatively small environments. It would be valuable to test the system's performance in larger, more complex spaces to understand its scalability.
-
Robustness to Sensor Failures: The paper does not discuss how the system would handle sensor failures or partial map loss in individual robots. Strategies for graceful degradation and recovery could improve the system's reliability.
-
Integration with Higher-level Tasks: The paper focuses on the core SLAM functionality, but it could be beneficial to explore how this system could be integrated with higher-level task planning and decision-making for real-world applications.
Overall, the "Active Collaborative Visual SLAM exploiting ORB Features" system represents an interesting contribution to the field of collaborative robotics and SLAM. With further research and development, it could lead to more efficient and robust mapping solutions for a variety of applications.
Conclusion
This paper presents a novel approach to collaborative visual SLAM that leverages active coordination between multiple robots and the use of efficient ORB visual features. By actively planning the robots' movements and using computationally lightweight ORB descriptors, the system can quickly and accurately map large environments in a decentralized manner.
The key strengths of the approach are its ability to efficiently explore and exploit the environment, its use of robust visual features, and its decentralized architecture. These features make the system scalable and suitable for real-world applications, such as search and rescue, construction site monitoring, and space exploration.
While the paper demonstrates promising results, there are areas for further research, such as exploring more advanced visual features, improving scalability to larger environments, and integrating the system with higher-level decision-making capabilities. Overall, this work represents an important step forward in the field of collaborative robotics and SLAM.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Active Collaborative Visual SLAM exploiting ORB Features
Muhammad Farhan Ahmed, Vincent Fr'emont, Isabelle Fantoni
In autonomous robotics, a significant challenge involves devising robust solutions for Active Collaborative SLAM (AC-SLAM). This process requires multiple robots to cooperatively explore and map an unknown environment by intelligently coordinating their movements and sensor data acquisition. In this article, we present an efficient visual AC-SLAM method using aerial and ground robots for environment exploration and mapping. We propose an efficient frontiers filtering method that takes into account the common IoU map frontiers and reduces the frontiers for each robot. Additionally, we also present an approach to guide robots to previously visited goal positions to promote loop closure to reduce SLAM uncertainty. The proposed method is implemented in ROS and evaluated through simulations on publicly available datasets and similar methods, achieving an accumulative average of 59% of increase in area coverage.
Read more9/10/2024
0
Efficient Frontier Management for Collaborative Active SLAM
Muhammad Farhan Ahmed, Matteo Maragliano, Vincent FremontCarmine, Tommaso Recchiuto, Antonio Sgorbissa
In autonomous robotics, a critical challenge lies in developing robust solutions for Active Collaborative SLAM, wherein multiple robots collaboratively explore and map an unknown environment while intelligently coordinating their movements and sensor data acquisitions. In this article, we present an efficient centralized frontier sharing approach that maximizes exploration by taking into account information gain in the merged map, distance, and reward computation among frontier candidates and encourages the spread of agents into the environment. Eventually, our method efficiently spreads the robots for maximum exploration while keeping SLAM uncertainty low. Additionally, we also present two coordination approaches, synchronous and asynchronous to prioritize robot goal assignments by the central server. The proposed method is implemented in ROS and evaluated through simulation and experiments on publicly available datasets and similar methods, rendering promising results.
Read more7/23/2024

0
Active Visual Localization for Multi-Agent Collaboration: A Data-Driven Approach
Matthew Hanlon, Boyang Sun, Marc Pollefeys, Hermann Blum
Rather than having each newly deployed robot create its own map of its surroundings, the growing availability of SLAM-enabled devices provides the option of simply localizing in a map of another robot or device. In cases such as multi-robot or human-robot collaboration, localizing all agents in the same map is even necessary. However, localizing e.g. a ground robot in the map of a drone or head-mounted MR headset presents unique challenges due to viewpoint changes. This work investigates how active visual localization can be used to overcome such challenges of viewpoint changes. Specifically, we focus on the problem of selecting the optimal viewpoint at a given location. We compare existing approaches in the literature with additional proposed baselines and propose a novel data-driven approach. The result demonstrates the superior performance of the data-driven approach when compared to existing methods, both in controlled simulation experiments and real-world deployment.
Read more8/7/2024
0
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
Read more8/22/2024