Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars

0
Sign in to get full access
Overview
- Presents an enhanced visual SLAM (Simultaneous Localization and Mapping) system for collision-free driving in lightweight autonomous cars
- Focuses on improving the accuracy and robustness of visual SLAM to enable safe navigation in dynamic environments
- Leverages ORB features and geometric constraints to enhance the SLAM pipeline for better obstacle detection and avoidance
Plain English Explanation
The paper describes an improved visual SLAM system designed for lightweight autonomous cars to navigate safely without collisions. Visual SLAM is a core technology that allows self-driving cars to understand their surroundings and locate themselves within their environment.
The researchers have enhanced the visual SLAM pipeline to make it more accurate and robust, especially in dynamic environments with moving objects. They use ORB features and geometric constraints to better detect obstacles and plan collision-free paths. This helps the autonomous car navigate safely, even in complex and changing road conditions.
The goal is to create a SLAM system that works reliably on lightweight, low-cost hardware that can be easily integrated into compact self-driving vehicles. This could make autonomous driving more accessible and affordable.
Technical Explanation
The paper presents an enhanced visual SLAM system that leverages ORB features and geometric constraints to enable collision-free driving for lightweight autonomous cars.
The SLAM pipeline includes the following key components:
-
ORB Feature Extraction: The system uses the efficient ORB (Oriented FAST and Rotated BRIEF) feature detection and description algorithm to extract robust visual features from camera images.
-
Geometric Constraint Reasoning: The SLAM module incorporates geometric constraints, such as the ground plane and obstacle boundaries, to improve the accuracy of camera pose estimation and 3D mapping.
-
Obstacle Detection and Avoidance: The enhanced SLAM system can detect obstacles in the environment and plan collision-free trajectories for the autonomous vehicle to navigate safely.
The researchers evaluated their approach on both simulated and real-world datasets, demonstrating improved performance in terms of localization accuracy, mapping quality, and obstacle avoidance compared to standard visual SLAM techniques. The system was shown to work effectively on lightweight hardware, making it suitable for deployment in compact autonomous cars.
Critical Analysis
The paper presents a thoughtful approach to enhancing visual SLAM for the specific challenges of autonomous driving in dynamic environments. The integration of ORB features and geometric constraints is a promising way to improve the robustness and reliability of the SLAM system.
However, the paper does not provide a detailed analysis of the computational complexity and resource requirements of the proposed SLAM pipeline. This information would be important to fully assess the suitability of the system for deployment on lightweight, embedded hardware in self-driving cars.
Additionally, the paper could have explored the performance of the SLAM system in more diverse and challenging scenarios, such as crowded urban environments or adverse weather conditions. Further testing and validation would help to identify any remaining limitations or areas for improvement.
Conclusion
This research presents an enhanced visual SLAM system that aims to enable safe, collision-free driving for lightweight autonomous cars. By leveraging ORB features and geometric constraints, the SLAM pipeline achieves improved accuracy and robustness, particularly in dynamic environments with moving obstacles.
The ability to run this SLAM system on compact, low-cost hardware is a valuable contribution, as it could help make autonomous driving technologies more accessible and widely adoptable. While the paper demonstrates promising results, further work is needed to fully validate the system's performance and resource requirements for real-world deployment in self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
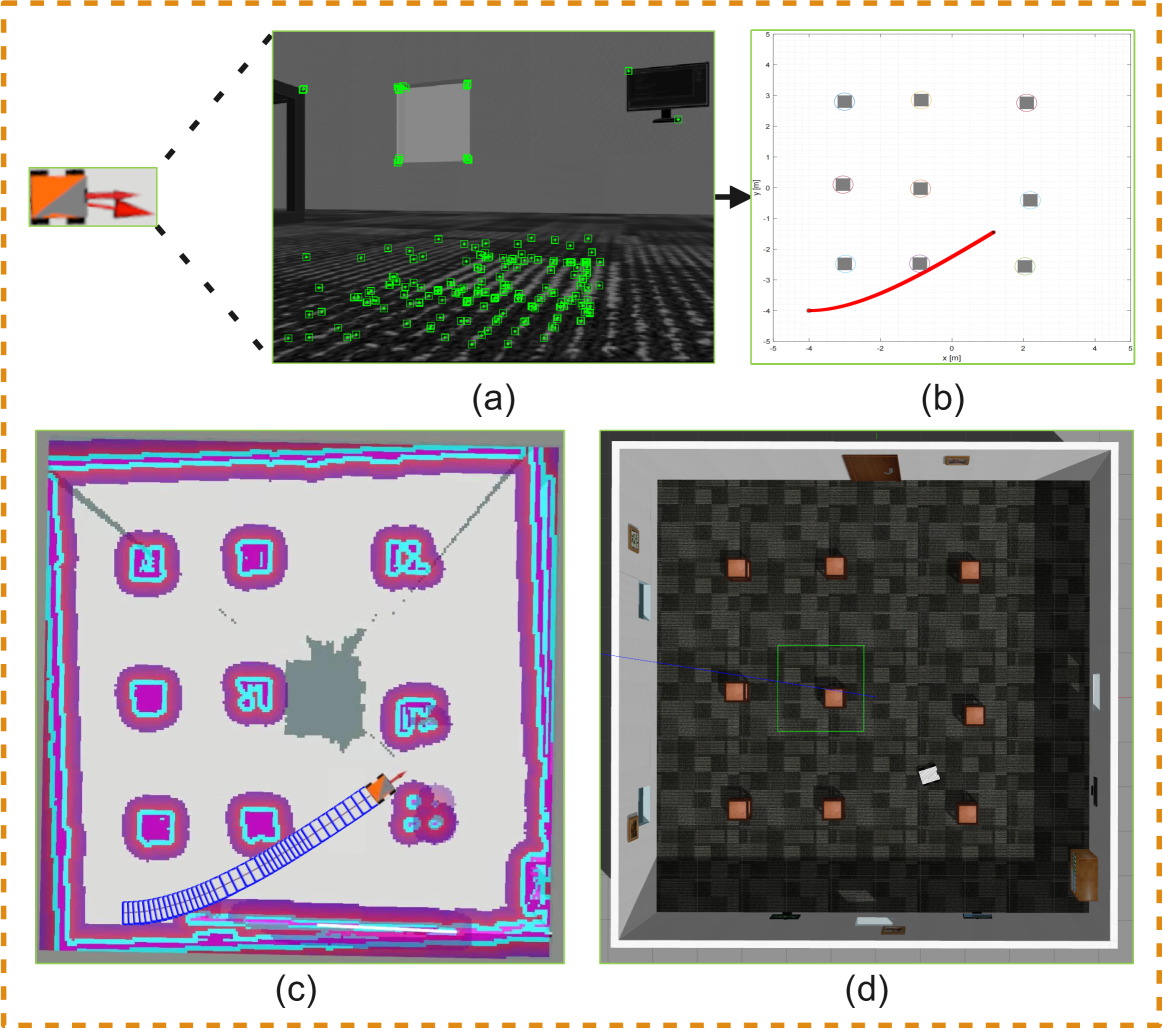
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
Read more8/22/2024

0
Active Collaborative Visual SLAM exploiting ORB Features
Muhammad Farhan Ahmed, Vincent Fr'emont, Isabelle Fantoni
In autonomous robotics, a significant challenge involves devising robust solutions for Active Collaborative SLAM (AC-SLAM). This process requires multiple robots to cooperatively explore and map an unknown environment by intelligently coordinating their movements and sensor data acquisition. In this article, we present an efficient visual AC-SLAM method using aerial and ground robots for environment exploration and mapping. We propose an efficient frontiers filtering method that takes into account the common IoU map frontiers and reduces the frontiers for each robot. Additionally, we also present an approach to guide robots to previously visited goal positions to promote loop closure to reduce SLAM uncertainty. The proposed method is implemented in ROS and evaluated through simulations on publicly available datasets and similar methods, achieving an accumulative average of 59% of increase in area coverage.
Read more9/10/2024

0
AirSLAM: An Efficient and Illumination-Robust Point-Line Visual SLAM System
Kuan Xu, Yuefan Hao, Shenghai Yuan, Chen Wang, Lihua Xie
In this paper, we present an efficient visual SLAM system designed to tackle both short-term and long-term illumination challenges. Our system adopts a hybrid approach that combines deep learning techniques for feature detection and matching with traditional backend optimization methods. Specifically, we propose a unified convolutional neural network (CNN) that simultaneously extracts keypoints and structural lines. These features are then associated, matched, triangulated, and optimized in a coupled manner. Additionally, we introduce a lightweight relocalization pipeline that reuses the built map, where keypoints, lines, and a structure graph are used to match the query frame with the map. To enhance the applicability of the proposed system to real-world robots, we deploy and accelerate the feature detection and matching networks using C++ and NVIDIA TensorRT. Extensive experiments conducted on various datasets demonstrate that our system outperforms other state-of-the-art visual SLAM systems in illumination-challenging environments. Efficiency evaluations show that our system can run at a rate of 73Hz on a PC and 40Hz on an embedded platform.
Read more8/9/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024