Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization

0
🛠️
Sign in to get full access
Overview
- This paper proposes a method for active sensor planning during object reconstruction, which is crucial for autonomous mobile robots.
- The method integrates implicit representation with active reconstruction tasks to balance accuracy and efficiency.
- It builds an implicit occupancy field as a geometry proxy and uses the prior object bounding box as auxiliary information to generate detailed reconstructions.
- A sampling-based approach is used to evaluate view uncertainty by directly extracting entropy from the reconstructed occupancy probability field.
- The next-best-view (NBV) is optimized on a continuous manifold by maximizing the view uncertainty using gradient descent, enhancing the method's adaptability.
Plain English Explanation
Autonomous mobile robots need to be able to reconstruct objects in their environment accurately and efficiently. This paper presents a new method that combines two powerful techniques to achieve this:
-
Implicit Representation: Instead of representing objects using a traditional 3D mesh, the method builds an "implicit occupancy field" - a mathematical model that can describe the shape and geometry of an object in a more flexible and efficient way. This allows the robot to generate detailed reconstructions without needing to store a large amount of data.
-
Active Reconstruction: The robot doesn't just passively observe the environment - it actively plans the best sensor views to gather information and improve the reconstruction. This is done by evaluating the "uncertainty" of each potential view, and then optimizing the next view to maximize the reduction in uncertainty.
The key innovation is that the method can optimize the next view continuously, rather than just choosing from a set of pre-defined candidates. This makes it more adaptable to different scenarios and environments. The simulations and real-world experiments show that this approach leads to more accurate and efficient object reconstruction compared to previous methods.
Technical Explanation
The paper proposes a seamless integration of implicit representation and active reconstruction tasks. It builds an implicit occupancy field as a geometry proxy, using the prior object bounding box as auxiliary information to generate clean and detailed reconstructions.
To evaluate view uncertainty, the method employs a sampling-based approach that directly extracts entropy from the reconstructed occupancy probability field. This eliminates the need for additional uncertainty maps or learning, as in previous methods like ActiveNeuS and MAP-NBV.
Unlike those previous methods that compare view uncertainty within a finite set of candidates, this paper aims to find the next-best-view (NBV) on a continuous manifold. Leveraging the differentiability of the implicit representation, the NBV can be optimized directly by maximizing the view uncertainty using gradient descent. This significantly enhances the method's adaptability to different scenarios.
Critical Analysis
The paper provides a thorough evaluation of the proposed method through both simulation and real-world experiments. The results demonstrate that the method effectively improves reconstruction accuracy and efficiency compared to previous approaches.
However, the paper does not address some potential limitations or areas for further research. For example, it does not discuss how the method would scale to more complex, cluttered environments with multiple objects. The reliance on a known prior object bounding box may also limit the applicability in scenarios where this information is not available.
Additionally, the paper does not provide much insight into the computational complexity or runtime performance of the method. This could be an important consideration for real-world deployment on resource-constrained mobile robots.
Finally, while the paper claims the method will be open-sourced, it would be helpful for the authors to provide more details on the implementation and evaluation process to allow for better reproducibility and further research in this area.
Conclusion
This paper presents a novel approach for active sensor planning during object reconstruction, which is a critical capability for autonomous mobile robots. By seamlessly integrating implicit representation and active reconstruction, the method is able to achieve a balance between accuracy and efficiency.
The key innovation is the ability to optimize the next-best-view on a continuous manifold, which enhances the method's adaptability to different scenarios. The experimental results demonstrate the effectiveness of this approach, and the open-source release of the code will likely spur further research and development in this area.
Overall, this work represents an important step forward in the field of active 3D reconstruction and has the potential to significantly improve the performance of autonomous mobile robots in real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization
Dongyu Yan, Jianheng Liu, Fengyu Quan, Haoyao Chen, Mengmeng Fu
Actively planning sensor views during object reconstruction is crucial for autonomous mobile robots. An effective method should be able to strike a balance between accuracy and efficiency. In this paper, we propose a seamless integration of the emerging implicit representation with the active reconstruction task. We build an implicit occupancy field as our geometry proxy. While training, the prior object bounding box is utilized as auxiliary information to generate clean and detailed reconstructions. To evaluate view uncertainty, we employ a sampling-based approach that directly extracts entropy from the reconstructed occupancy probability field as our measure of view information gain. This eliminates the need for additional uncertainty maps or learning. Unlike previous methods that compare view uncertainty within a finite set of candidates, we aim to find the next-best-view (NBV) on a continuous manifold. Leveraging the differentiability of the implicit representation, the NBV can be optimized directly by maximizing the view uncertainty using gradient descent. It significantly enhances the method's adaptability to different scenarios. Simulation and real-world experiments demonstrate that our approach effectively improves reconstruction accuracy and efficiency of view planning in active reconstruction tasks. The proposed system will open source at https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git.
Read more5/29/2024
0
Autonomous Implicit Indoor Scene Reconstruction with Frontier Exploration
Jing Zeng, Yanxu Li, Jiahao Sun, Qi Ye, Yunlong Ran, Jiming Chen
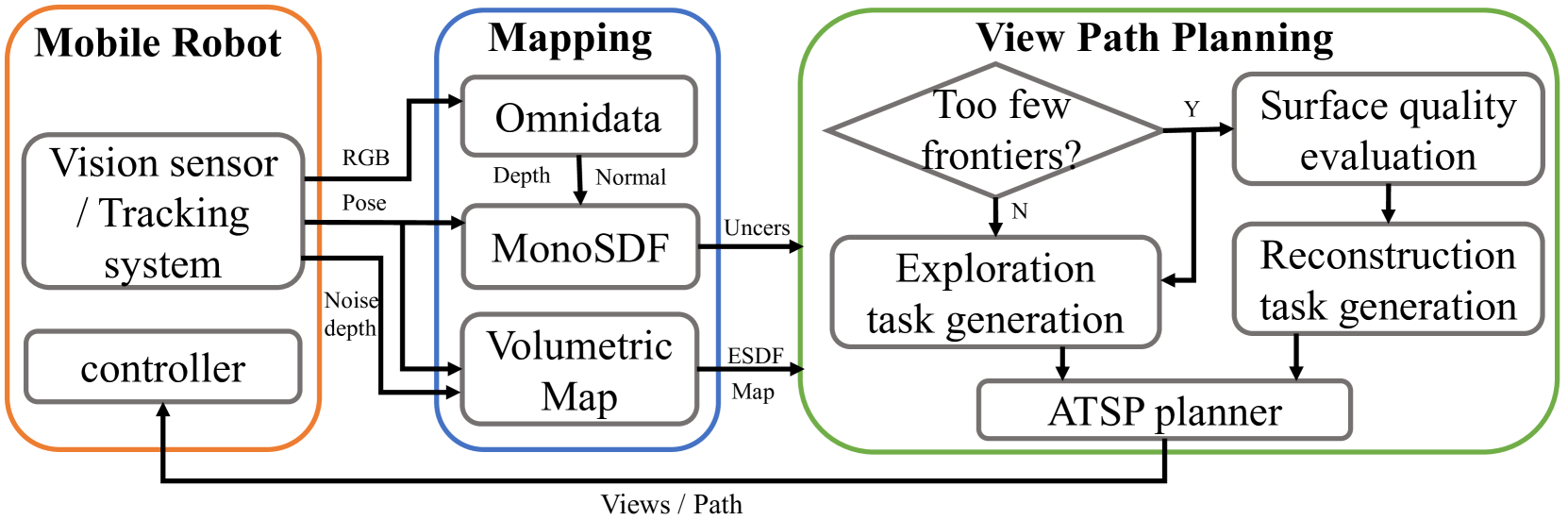
Implicit neural representations have demonstrated significant promise for 3D scene reconstruction. Recent works have extended their applications to autonomous implicit reconstruction through the Next Best View (NBV) based method. However, the NBV method cannot guarantee complete scene coverage and often necessitates extensive viewpoint sampling, particularly in complex scenes. In the paper, we propose to 1) incorporate frontier-based exploration tasks for global coverage with implicit surface uncertainty-based reconstruction tasks to achieve high-quality reconstruction. and 2) introduce a method to achieve implicit surface uncertainty using color uncertainty, which reduces the time needed for view selection. Further with these two tasks, we propose an adaptive strategy for switching modes in view path planning, to reduce time and maintain superior reconstruction quality. Our method exhibits the highest reconstruction quality among all planning methods and superior planning efficiency in methods involving reconstruction tasks. We deploy our method on a UAV and the results show that our method can plan multi-task views and reconstruct a scene with high quality.
Read more4/17/2024

0
ActiveNeuS: Active 3D Reconstruction using Neural Implicit Surface Uncertainty
Hyunseo Kim, Hyeonseo Yang, Taekyung Kim, YoonSung Kim, Jin-Hwa Kim, Byoung-Tak Zhang
Active view selection in 3D scene reconstruction has been widely studied since training on informative views is critical for reconstruction. Recently, Neural Radiance Fields (NeRF) variants have shown promising results in active 3D reconstruction using uncertainty-guided view selection. They utilize uncertainties estimated with neural networks that encode scene geometry and appearance. However, the choice of uncertainty integration methods, either voxel-based or neural rendering, has conventionally depended on the types of scene uncertainty being estimated, whether geometric or appearance-related. In this paper, we introduce Colorized Surface Voxel (CSV)-based view selection, a new next-best view (NBV) selection method exploiting surface voxel-based measurement of uncertainty in scene appearance. CSV encapsulates the uncertainty of estimated scene appearance (e.g., color uncertainty) and estimated geometric information (e.g., surface). Using the geometry information, we interpret the uncertainty of scene appearance 3D-wise during the aggregation of the per-voxel uncertainty. Consequently, the uncertainty from occluded and complex regions is recognized under challenging scenarios with limited input data. Our method outperforms previous works on popular datasets, DTU and Blender, and our new dataset with imbalanced viewpoints, showing that the CSV-based view selection significantly improves performance by up to 30%.
Read more6/11/2024
0
GenNBV: Generalizable Next-Best-View Policy for Active 3D Reconstruction
Xiao Chen, Quanyi Li, Tai Wang, Tianfan Xue, Jiangmiao Pang
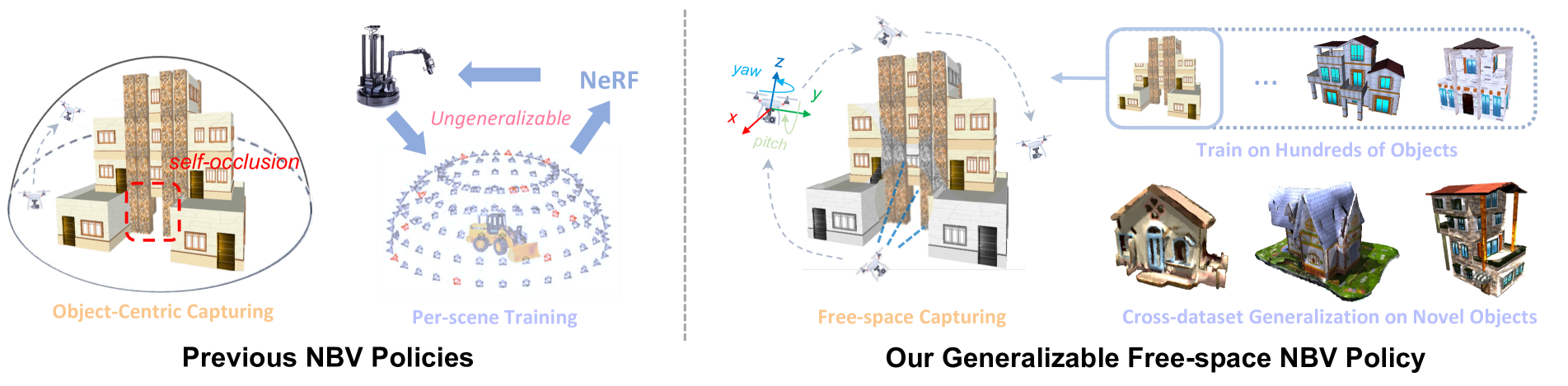
While recent advances in neural radiance field enable realistic digitization for large-scale scenes, the image-capturing process is still time-consuming and labor-intensive. Previous works attempt to automate this process using the Next-Best-View (NBV) policy for active 3D reconstruction. However, the existing NBV policies heavily rely on hand-crafted criteria, limited action space, or per-scene optimized representations. These constraints limit their cross-dataset generalizability. To overcome them, we propose GenNBV, an end-to-end generalizable NBV policy. Our policy adopts a reinforcement learning (RL)-based framework and extends typical limited action space to 5D free space. It empowers our agent drone to scan from any viewpoint, and even interact with unseen geometries during training. To boost the cross-dataset generalizability, we also propose a novel multi-source state embedding, including geometric, semantic, and action representations. We establish a benchmark using the Isaac Gym simulator with the Houses3K and OmniObject3D datasets to evaluate this NBV policy. Experiments demonstrate that our policy achieves a 98.26% and 97.12% coverage ratio on unseen building-scale objects from these datasets, respectively, outperforming prior solutions.
Read more7/31/2024