MAP-NBV: Multi-agent Prediction-guided Next-Best-View Planning for Active 3D Object Reconstruction

0

Sign in to get full access
Overview
- The paper proposes a novel approach called MAP-NBV (Multi-agent Prediction-guided Next-Best-View) for active 3D object reconstruction using multiple agents.
- The key idea is to leverage predictions about the object's geometry to guide the next-best-view (NBV) planning process, which determines the optimal viewpoint for each agent to capture new information about the object.
- The method incorporates a multi-agent coordination strategy to ensure efficient exploration and coverage of the object.
Plain English Explanation
The paper presents a system to help robots or drones [object Object] more effectively. Often, these systems need to move around an object and take multiple photos or scans from different angles to build a complete 3D model. The researchers' approach, called MAP-NBV, helps the robots or drones figure out the best places to take their next photos or scans.
The key innovation is that the system uses predictions about the object's shape and geometry to guide where the robots or drones should move next. This is better than just randomly selecting the next viewpoint, as the predictions help ensure the robots efficiently explore the entire object and capture all the necessary details.
Additionally, the system coordinates the movements of multiple robots or drones, so they can work together to cover the object more quickly and thoroughly. This multi-agent approach helps make the 3D reconstruction process [object Object].
Overall, the MAP-NBV approach aims to streamline the 3D object reconstruction process by leveraging shape predictions and multi-agent coordination, which could have applications in areas like [object Object], robotics, and autonomous navigation.
Technical Explanation
The MAP-NBV approach builds on the concept of next-best-view (NBV) planning, which determines the optimal viewpoint for a sensor (e.g., a camera) to capture new information about an object. The researchers extend this idea to a multi-agent setting, where multiple robots or drones work together to reconstruct a 3D object.
The key innovation is the incorporation of shape prediction to guide the NBV planning process. Specifically, the system maintains a partial 3D reconstruction of the object and uses this to predict the object's unseen geometry. These predictions are then used to identify the next-best-views that will most effectively capture the remaining unknown parts of the object.
To coordinate the multi-agent exploration, the system employs a decentralized control strategy. Each agent independently selects its next-best-view based on the shared partial reconstruction and shape predictions, while also considering the planned paths of the other agents to avoid redundant coverage.
The researchers evaluate their approach on several real-world 3D object reconstruction tasks, [object Object]. The results demonstrate that the MAP-NBV method outperforms the alternatives in terms of reconstruction quality and efficiency, highlighting the benefits of leveraging shape predictions and multi-agent coordination.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the MAP-NBV approach, exploring its performance across different object types and comparing it to relevant baselines. The researchers acknowledge that their method relies on the accuracy of the shape prediction model, and they discuss the potential impact of prediction errors on the overall reconstruction quality.
One potential limitation is the computational complexity of the NBV planning process, especially in scenarios with a large number of agents. The authors mention that they use approximations and heuristics to make the planning more efficient, but it would be valuable to further investigate the scalability of the approach as the number of agents increases.
Additionally, the paper does not address the potential challenges of deploying such a system in real-world settings, such as sensor noise, communication delays, or environmental disturbances. [object Object] could help make the system more robust to these practical considerations.
Overall, the MAP-NBV approach presents an interesting and promising solution for active 3D object reconstruction using multiple agents. The key ideas of leveraging shape predictions and multi-agent coordination are well-motivated and could have broader applicability in [object Object].
Conclusion
The MAP-NBV method offers a novel approach to active 3D object reconstruction by integrating shape prediction and multi-agent coordination. By guiding the next-best-view planning process with predicted object geometry, the system can efficiently explore and capture the complete 3D structure of an object using a team of agents. The encouraging results demonstrate the potential of this approach to streamline 3D reconstruction tasks, with possible applications in industrial inspection, robotic manipulation, and autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MAP-NBV: Multi-agent Prediction-guided Next-Best-View Planning for Active 3D Object Reconstruction
Harnaik Dhami, Vishnu D. Sharma, Pratap Tokekar
Next-Best View (NBV) planning is a long-standing problem of determining where to obtain the next best view of an object from, by a robot that is viewing the object. There are a number of methods for choosing NBV based on the observed part of the object. In this paper, we investigate how predicting the unobserved part helps with the efficiency of reconstructing the object. We present, Multi-Agent Prediction-Guided NBV (MAP-NBV), a decentralized coordination algorithm for active 3D reconstruction with multi-agent systems. Prediction-based approaches have shown great improvement in active perception tasks by learning the cues about structures in the environment from data. However, these methods primarily focus on single-agent systems. We design a decentralized next-best-view approach that utilizes geometric measures over the predictions and jointly optimizes the information gain and control effort for efficient collaborative 3D reconstruction of the object. Our method achieves 19% improvement over the non-predictive multi-agent approach in simulations using AirSim and ShapeNet. We make our code publicly available through our project website: http://raaslab.org/projects/MAPNBV/.
Read more6/26/2024
0
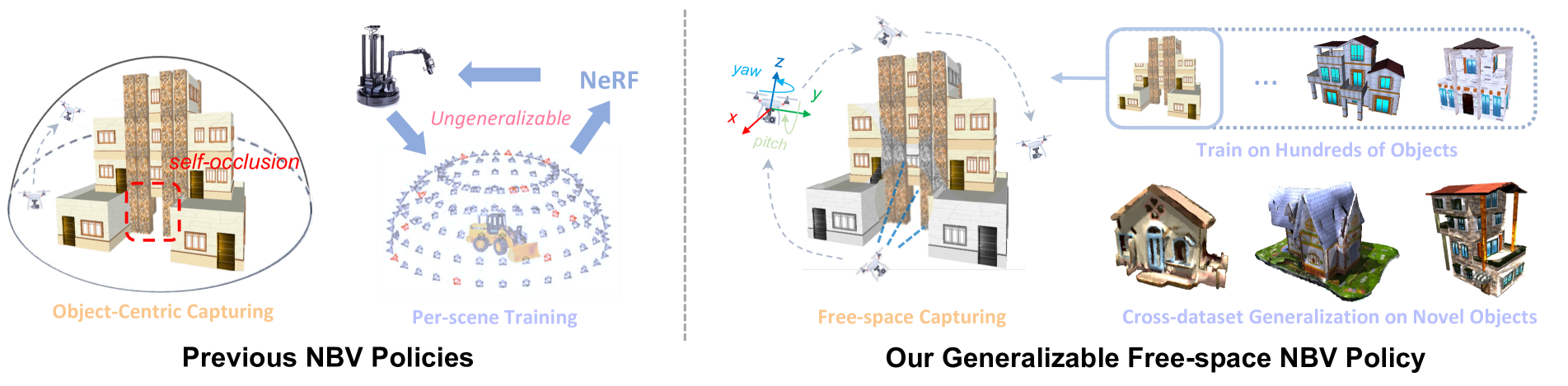
GenNBV: Generalizable Next-Best-View Policy for Active 3D Reconstruction
Xiao Chen, Quanyi Li, Tai Wang, Tianfan Xue, Jiangmiao Pang
While recent advances in neural radiance field enable realistic digitization for large-scale scenes, the image-capturing process is still time-consuming and labor-intensive. Previous works attempt to automate this process using the Next-Best-View (NBV) policy for active 3D reconstruction. However, the existing NBV policies heavily rely on hand-crafted criteria, limited action space, or per-scene optimized representations. These constraints limit their cross-dataset generalizability. To overcome them, we propose GenNBV, an end-to-end generalizable NBV policy. Our policy adopts a reinforcement learning (RL)-based framework and extends typical limited action space to 5D free space. It empowers our agent drone to scan from any viewpoint, and even interact with unseen geometries during training. To boost the cross-dataset generalizability, we also propose a novel multi-source state embedding, including geometric, semantic, and action representations. We establish a benchmark using the Isaac Gym simulator with the Houses3K and OmniObject3D datasets to evaluate this NBV policy. Experiments demonstrate that our policy achieves a 98.26% and 97.12% coverage ratio on unseen building-scale objects from these datasets, respectively, outperforming prior solutions.
Read more7/31/2024
🛠️
0
Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization
Dongyu Yan, Jianheng Liu, Fengyu Quan, Haoyao Chen, Mengmeng Fu
Actively planning sensor views during object reconstruction is crucial for autonomous mobile robots. An effective method should be able to strike a balance between accuracy and efficiency. In this paper, we propose a seamless integration of the emerging implicit representation with the active reconstruction task. We build an implicit occupancy field as our geometry proxy. While training, the prior object bounding box is utilized as auxiliary information to generate clean and detailed reconstructions. To evaluate view uncertainty, we employ a sampling-based approach that directly extracts entropy from the reconstructed occupancy probability field as our measure of view information gain. This eliminates the need for additional uncertainty maps or learning. Unlike previous methods that compare view uncertainty within a finite set of candidates, we aim to find the next-best-view (NBV) on a continuous manifold. Leveraging the differentiability of the implicit representation, the NBV can be optimized directly by maximizing the view uncertainty using gradient descent. It significantly enhances the method's adaptability to different scenarios. Simulation and real-world experiments demonstrate that our approach effectively improves reconstruction accuracy and efficiency of view planning in active reconstruction tasks. The proposed system will open source at https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git.
Read more5/29/2024

0
Gradient-based Local Next-best-view Planning for Improved Perception of Targeted Plant Nodes
Akshay K. Burusa, Eldert J. van Henten, Gert Kootstra
Robots are increasingly used in tomato greenhouses to automate labour-intensive tasks such as selective harvesting and de-leafing. To perform these tasks, robots must be able to accurately and efficiently perceive the plant nodes that need to be cut, despite the high levels of occlusion from other plant parts. We formulate this problem as a local next-best-view (NBV) planning task where the robot has to plan an efficient set of camera viewpoints to overcome occlusion and improve the quality of perception. Our formulation focuses on quickly improving the perception accuracy of a single target node to maximise its chances of being cut. Previous methods of NBV planning mostly focused on global view planning and used random sampling of candidate viewpoints for exploration, which could suffer from high computational costs, ineffective view selection due to poor candidates, or non-smooth trajectories due to inefficient sampling. We propose a gradient-based NBV planner using differential ray sampling, which directly estimates the local gradient direction for viewpoint planning to overcome occlusion and improve perception. Through simulation experiments, we showed that our planner can handle occlusions and improve the 3D reconstruction and position estimation of nodes equally well as a sampling-based NBV planner, while taking ten times less computation and generating 28% more efficient trajectories.
Read more4/30/2024