Active Inference Tree Search in Large POMDPs

0
🤯
Sign in to get full access
Overview
- The paper introduces a new method called Active Inference Tree Search (AcT) that combines the strengths of two approaches to planning: the biologically-inspired Active Inference and the scalable Tree Search methods used in AI.
- AcT aims to enable the biologically realistic Active Inference approach to be applied to large-scale planning problems, while also providing a principled solution to the exploration-exploitation dilemma that is often addressed heuristically in tree search methods.
- Simulations show that AcT can successfully navigate challenging planning problems, including those that require adaptive exploration, and can reproduce state-of-the-art results on a large POMDP (Partially Observable Markov Decision Process) benchmark.
- The paper also demonstrates how AcT can be used to simulate the neurophysiological responses of humans and animals solving complex planning problems.
Plain English Explanation
Living organisms and artificial systems both need to plan ahead effectively to achieve their goals. Neuroscience and AI have studied this planning ability, but from different perspectives - one focused on biological realism, the other on scalability.
The new method introduced in this paper, Active Inference Tree Search (AcT), aims to combine the strengths of these two approaches. It takes the biologically-grounded "Active Inference" method and pairs it with the scalable "Tree Search" techniques used in AI.
This combination enhances both approaches. The tree search allows the Active Inference method to be applied to large-scale problems, while Active Inference provides a principled way to address the "exploration-exploitation dilemma" - a common challenge in tree search methods that is often handled in a more ad-hoc way.
Through simulations, the researchers show that AcT can successfully navigate complex planning problems, including ones that require adaptive exploration. It can also match the performance of state-of-the-art methods on a challenging POMDP benchmark problem. Additionally, AcT can be used to model the brain activity of humans and animals solving these types of planning tasks.
Overall, this new approach combines the biological realism of neuroscience and the scalability of AI to create a powerful new tool for planning that advances both fields.
Technical Explanation
The paper introduces a novel method called Active Inference Tree Search (AcT) that combines the strengths of two leading approaches to planning: the biologically-inspired Active Inference framework from cognitive neuroscience, and the scalable Tree Search methods commonly used in AI.
Active Inference is a principled, first-principles approach to planning that is grounded in the neuroscience of how biological agents plan and make decisions. However, it has historically struggled with scaling to large, complex planning problems. On the other hand, tree search methods from AI are highly scalable, but often rely on heuristic solutions to the exploration-exploitation dilemma - the challenge of balancing searching for new, potentially better solutions versus exploiting known good solutions.
By combining Active Inference and Tree Search, AcT aims to capitalize on the strengths of both approaches. The tree search component allows the biologically-realistic Active Inference framework to be applied to large-scale planning problems, while the Active Inference principles provide a principled solution to the exploration-exploitation trade-off.
The paper presents simulations demonstrating AcT's performance on several challenging planning problems, including:
- Navigation in complex binary trees that are difficult for sampling-based methods
- Problems requiring adaptive exploration
- The large-scale "RockSample" POMDP benchmark, where AcT reproduces state-of-the-art results
The researchers also show how AcT can be used to model the neurophysiological responses of humans and animals solving complex planning tasks, bridging the gap between neuroscience and AI planning.
Critical Analysis
The paper presents a novel and promising approach to planning that combines the biological realism of Active Inference with the scalability of Tree Search methods. The authors demonstrate successful performance on a range of challenging planning problems, including the ability to match state-of-the-art results on a large POMDP benchmark.
One potential limitation noted in the paper is that the current implementation of AcT may struggle with problems that require long-term planning horizons, as the tree search can become computationally intensive. The authors suggest that incorporating additional approximation techniques or hierarchical planning may help address this.
Additionally, the paper does not provide a comprehensive comparison of AcT's performance to other leading POMDP planning algorithms beyond the RockSample benchmark. Further evaluations on a broader set of POMDP problems could help better situate the capabilities of this new method.
It would also be valuable to see more detailed analysis of how the combination of Active Inference and Tree Search principles confers benefits over each approach in isolation. The paper provides high-level arguments, but more empirical evidence of the synergies between the two components could strengthen the claims.
Overall, this research represents an intriguing step towards bridging the gap between the biological realism of neuroscience and the scalability requirements of practical AI planning systems. Further development and evaluation of the AcT framework could yield valuable insights for both fields.
Conclusion
This paper introduces a novel planning method called Active Inference Tree Search (AcT) that unifies the biologically-grounded Active Inference approach from cognitive neuroscience with the scalable Tree Search techniques commonly used in AI.
Through simulations, the researchers demonstrate that AcT can successfully navigate challenging planning problems, including those requiring adaptive exploration, and can match state-of-the-art performance on a large POMDP benchmark. Importantly, AcT also provides a way to model the neurophysiological responses of humans and animals solving complex planning tasks, bridging the gap between neuroscience and AI.
By combining the strengths of these two planning paradigms, AcT offers a principled approach that achieves both biological realism and practical scalability. This work represents an important step towards aligning the planning capabilities of artificial systems with the planning abilities observed in living organisms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤯
0
Active Inference Tree Search in Large POMDPs
Domenico Maisto, Francesco Gregoretti, Karl Friston, Giovanni Pezzulo
The ability to plan ahead efficiently is key for both living organisms and artificial systems. Model-based planning and prospection are widely studied in cognitive neuroscience and artificial intelligence (AI), but from different perspectives--and with different desiderata in mind (biological realism versus scalability) that are difficult to reconcile. Here, we introduce a novel method to plan in POMDPs--Active Inference Tree Search (AcT)--that combines the normative character and biological realism of a leading planning theory in neuroscience (Active Inference) and the scalability of tree search methods in AI. This unification enhances both approaches. On the one hand, tree searches enable the biologically grounded, first principle method of active inference to be applied to large-scale problems. On the other hand, active inference provides a principled solution to the exploration-exploitation dilemma, which is often addressed heuristically in tree search methods. Our simulations show that AcT successfully navigates binary trees that are challenging for sampling-based methods, problems that require adaptive exploration, and the large POMDP problem 'RockSample'--in which AcT reproduces state-of-the-art POMDP solutions. Furthermore, we illustrate how AcT can be used to simulate neurophysiological responses (e.g., in the hippocampus and prefrontal cortex) of humans and other animals that solve large planning problems. These numerical analyses show that Active Tree Search is a principled realisation of neuroscientific and AI planning theories, which offer both biological realism and scalability.
Read more8/19/2024
🤯
0
Dynamic planning in hierarchical active inference
Matteo Priorelli, Ivilin Peev Stoianov
By dynamic planning, we refer to the ability of the human brain to infer and impose motor trajectories related to cognitive decisions. A recent paradigm, active inference, brings fundamental insights into the adaptation of biological organisms, constantly striving to minimize prediction errors to restrict themselves to life-compatible states. Over the past years, many studies have shown how human and animal behavior could be explained in terms of an active inferential process - either as discrete decision-making or continuous motor control - inspiring innovative solutions in robotics and artificial intelligence. Still, the literature lacks a comprehensive outlook on how to effectively plan actions in changing environments. Setting ourselves the goal of modeling tool use, we delve into the topic of dynamic planning in active inference, keeping in mind two crucial aspects of biological goal-directed behavior: the capacity to understand and exploit affordances for object manipulation, and to learn the hierarchical interactions between the self and the environment, including other agents. We start from a simple unit and gradually describe more advanced structures, comparing recently proposed design choices and providing basic examples for each section. This study distances itself from traditional views centered on neural networks and reinforcement learning, and points toward a yet unexplored direction in active inference: hybrid representations in hierarchical models.
Read more7/1/2024
0
Enhancing Population-based Search with Active Inference
Nassim Dehouche, Daniel Friedman
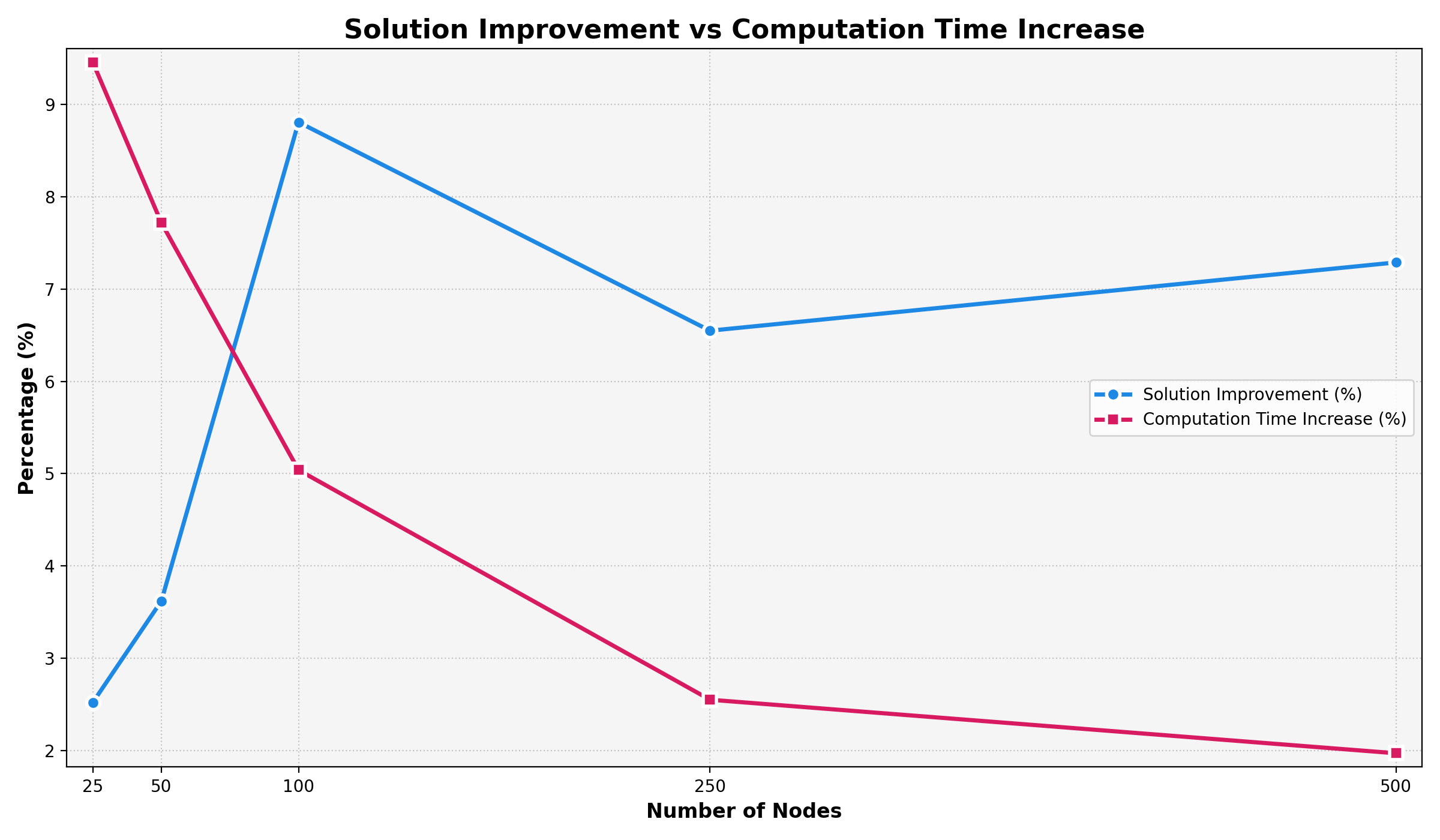
The Active Inference framework models perception and action as a unified process, where agents use probabilistic models to predict and actively minimize sensory discrepancies. In complement and contrast, traditional population-based metaheuristics rely on reactive environmental interactions without anticipatory adaptation. This paper proposes the integration of Active Inference into these metaheuristics to enhance performance through anticipatory environmental adaptation. We demonstrate this approach specifically with Ant Colony Optimization (ACO) on the Travelling Salesman Problem (TSP). Experimental results indicate that Active Inference can yield some improved solutions with only a marginal increase in computational cost, with interesting patterns of performance that relate to number and topology of nodes in the graph. Further work will characterize where and when different types of Active Inference augmentation of population metaheuristics may be efficacious.
Read more8/20/2024
🤿
0
Deep hybrid models: infer and plan in the real world
Matteo Priorelli, Ivilin Peev Stoianov
Determining an optimal plan to accomplish a goal is a hard problem in realistic scenarios, which often comprise dynamic and causal relationships between several entities. Although traditionally such problems have been tackled with optimal control and reinforcement learning, a recent biologically-motivated proposal casts planning and control as an inference process. Among these new approaches, one is particularly promising: active inference. This new paradigm assumes that action and perception are two complementary aspects of life whereby the role of the former is to fulfill the predictions inferred by the latter. In this study, we present an effective solution, based on active inference, to complex control tasks. The proposed architecture exploits hybrid (discrete and continuous) processing to construct a hierarchical and dynamic representation of the self and the environment, which is then used to produce a flexible plan consisting of subgoals at different temporal scales. We evaluate this deep hybrid model on a non-trivial task: reaching a moving object after having picked a moving tool. This study extends past work on planning as inference and advances an alternative direction to optimal control and reinforcement learning.
Read more6/24/2024