Active Scout: Multi-Target Tracking Using Neural Radiance Fields in Dense Urban Environments
2406.07431
0
0
Abstract
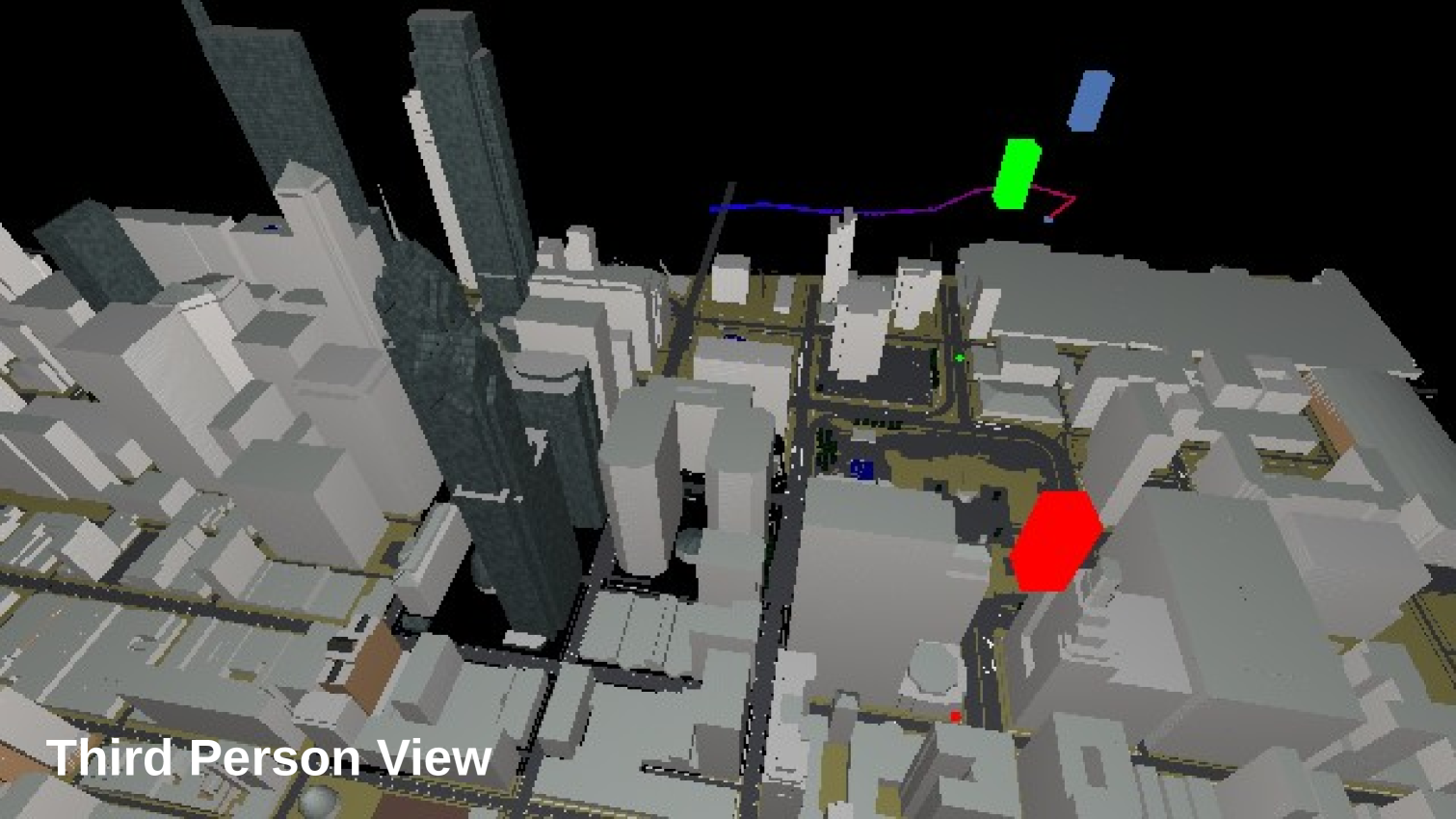
We study pursuit-evasion games in highly occluded urban environments, e.g. tall buildings in a city, where a scout (quadrotor) tracks multiple dynamic targets on the ground. We show that we can build a neural radiance field (NeRF) representation of the city -- online -- using RGB and depth images from different vantage points. This representation is used to calculate the information gain to both explore unknown parts of the city and track the targets -- thereby giving a completely first-principles approach to actively tracking dynamic targets. We demonstrate, using a custom-built simulator using Open Street Maps data of Philadelphia and New York City, that we can explore and locate 20 stationary targets within 300 steps. This is slower than a greedy baseline which which does not use active perception. But for dynamic targets that actively hide behind occlusions, we show that our approach maintains, at worst, a tracking error of 200m; the greedy baseline can have a tracking error as large as 600m. We observe a number of interesting properties in the scout's policies, e.g., it switches its attention to track a different target periodically, as the quality of the NeRF representation improves over time, the scout also becomes better in terms of target tracking.
Create account to get full access
Overview
- This paper introduces "Active Scout," a multi-target tracking system that uses neural radiance fields (NeRFs) to navigate dense urban environments.
- The system combines NeRFs with active perception techniques to efficiently track multiple moving targets.
- Key innovations include a novel NeRF architecture and optimization scheme tailored for multi-target tracking, as well as an active sensing strategy that guides the sensor platform to gather informative observations.
Plain English Explanation
The paper presents a new system called "Active Scout" that can track multiple moving targets, such as people or vehicles, in complex urban environments. It does this by using a type of 3D model called a "neural radiance field" (NeRF). [NeRFs are a powerful AI technique that can create realistic 3D scenes from just a few images - see the NeRF overview paper for more details.]
The key innovation in this work is how Active Scout combines NeRFs with "active perception" - the system actively decides where to move its sensors (e.g. cameras) to get the most informative views of the targets. This allows it to efficiently track multiple moving objects in crowded urban areas, where occlusions from buildings and other obstacles make tracking challenging.
The authors developed a specialized NeRF architecture and optimization process tailored for multi-target tracking, as well as an active sensing strategy to guide the sensor platform. [These techniques build on prior work on using NeRFs for 3D perception, such as the LiDARF and AG-NeRF systems.]
Technical Explanation
The key technical innovations in Active Scout are:
-
NeRF Architecture: The authors propose a modified NeRF model that can efficiently represent and update a 3D scene with multiple moving targets. This includes using a "tiled" NeRF representation to model the static background and a separate NeRF for each moving target. [See the Multi-Tiling NeRF paper for related work on efficient NeRF representations.]
-
Optimization Scheme: They develop a specialized optimization process to jointly update the NeRF models for the background and each target, allowing the system to efficiently track the targets as they move through the scene.
-
Active Sensing: Active Scout uses an active perception strategy to guide the sensor platform (e.g. a mobile robot) to collect observations that are most informative for tracking the targets. This involves predicting how the targets will move and planning sensor trajectories to keep them in view.
The authors evaluate Active Scout on several dense urban tracking datasets, showing it can effectively track multiple moving targets even in the presence of significant occlusions from buildings and other obstacles.
Critical Analysis
The paper presents a compelling approach for multi-target tracking in complex environments. The authors demonstrate strong empirical results, and the technical innovations around NeRF representations and active perception seem well-justified.
That said, the paper does not address some potential limitations:
- The reliance on NeRFs means the system requires a significant amount of prior data to build an accurate 3D scene model. This could limit its applicability in completely novel environments.
- The active sensing strategy is predicated on being able to accurately predict target motions. In highly dynamic or unpredictable environments, this assumption may not hold.
- The computational complexity of the joint NeRF optimization could make real-time performance challenging, especially as the number of targets increases.
Further research could explore ways to address these limitations, such as incorporating online scene learning, more sophisticated motion prediction models, or efficient NeRF optimization techniques. [The NeRF-GO paper provides some interesting ideas in this direction.]
Conclusion
The Active Scout system presents a novel approach to multi-target tracking in dense urban environments, leveraging the power of neural radiance fields and active perception. By developing specialized NeRF architectures and optimization schemes, as well as an effective active sensing strategy, the authors demonstrate the ability to track multiple moving targets even in the presence of significant occlusions. While the approach has some limitations, it represents an important step forward in the field of 3D perception and multi-object tracking, with potential applications in areas like autonomous navigation, surveillance, and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024

DiL-NeRF: Delving into Lidar for Neural Radiance Field on Street Scenes
Shanlin Sun, Bingbing Zhuang, Ziyu Jiang, Buyu Liu, Xiaohui Xie, Manmohan Chandraker
0
0
Photorealistic simulation plays a crucial role in applications such as autonomous driving, where advances in neural radiance fields (NeRFs) may allow better scalability through the automatic creation of digital 3D assets. However, reconstruction quality suffers on street scenes due to largely collinear camera motions and sparser samplings at higher speeds. On the other hand, the application often demands rendering from camera views that deviate from the inputs to accurately simulate behaviors like lane changes. In this paper, we propose several insights that allow a better utilization of Lidar data to improve NeRF quality on street scenes. First, our framework learns a geometric scene representation from Lidar, which is fused with the implicit grid-based representation for radiance decoding, thereby supplying stronger geometric information offered by explicit point cloud. Second, we put forth a robust occlusion-aware depth supervision scheme, which allows utilizing densified Lidar points by accumulation. Third, we generate augmented training views from Lidar points for further improvement. Our insights translate to largely improved novel view synthesis under real driving scenes.
5/7/2024
🧠
Multi-tiling Neural Radiance Field (NeRF) -- Geometric Assessment on Large-scale Aerial Datasets
Ningli Xu, Rongjun Qin, Debao Huang, Fabio Remondino
0
0
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
6/7/2024
NeRF On-the-go: Exploiting Uncertainty for Distractor-free NeRFs in the Wild
Weining Ren, Zihan Zhu, Boyang Sun, Jiaqi Chen, Marc Pollefeys, Songyou Peng
0
0
Neural Radiance Fields (NeRFs) have shown remarkable success in synthesizing photorealistic views from multi-view images of static scenes, but face challenges in dynamic, real-world environments with distractors like moving objects, shadows, and lighting changes. Existing methods manage controlled environments and low occlusion ratios but fall short in render quality, especially under high occlusion scenarios. In this paper, we introduce NeRF On-the-go, a simple yet effective approach that enables the robust synthesis of novel views in complex, in-the-wild scenes from only casually captured image sequences. Delving into uncertainty, our method not only efficiently eliminates distractors, even when they are predominant in captures, but also achieves a notably faster convergence speed. Through comprehensive experiments on various scenes, our method demonstrates a significant improvement over state-of-the-art techniques. This advancement opens new avenues for NeRF in diverse and dynamic real-world applications.
6/4/2024