ADaPT: As-Needed Decomposition and Planning with Language Models
2311.05772
0
0
💬
Abstract
Large Language Models (LLMs) are increasingly being used for interactive decision-making tasks requiring planning and adapting to the environment. Recent works employ LLMs-as-agents in broadly two ways: iteratively determining the next action (iterative executors) or generating plans and executing sub-tasks using LLMs (plan-and-execute). However, these methods struggle with task complexity, as the inability to execute any sub-task may lead to task failure. To address these shortcomings, we introduce As-Needed Decomposition and Planning for complex Tasks (ADaPT), an approach that explicitly plans and decomposes complex sub-tasks as-needed, i.e., when the LLM is unable to execute them. ADaPT recursively decomposes sub-tasks to adapt to both task complexity and LLM capability. Our results demonstrate that ADaPT substantially outperforms established strong baselines, achieving success rates up to 28.3% higher in ALFWorld, 27% in WebShop, and 33% in TextCraft -- a novel compositional dataset that we introduce. Through extensive analysis, we illustrate the importance of multilevel decomposition and establish that ADaPT dynamically adjusts to the capabilities of the executor LLM as well as to task complexity.
Create account to get full access
Overview
- The paper introduces a new approach called As-Needed Decomposition and Planning for complex Tasks (ADaPT) to address the shortcomings of existing methods for using large language models (LLMs) in interactive decision-making tasks that require planning and adapting to the environment.
- Existing methods either iteratively determine the next action (iterative executors) or generate plans and execute sub-tasks using LLMs (plan-and-execute), but struggle with task complexity as the inability to execute any sub-task may lead to task failure.
- ADaPT explicitly plans and decomposes complex sub-tasks as-needed, i.e., when the LLM is unable to execute them, and recursively decomposes sub-tasks to adapt to both task complexity and LLM capability.
Plain English Explanation
ADaPT: As-Needed Decomposition and Planning for complex Tasks is a new approach that aims to improve the performance of large language models (LLMs) in complex, interactive tasks that require planning and adapting to the environment.
Imagine you're trying to bake a cake, but you've never baked before. An iterative executor approach would be like trying to figure out the next step one at a time, without a clear plan. A plan-and-execute approach would be like generating a full recipe and instructions upfront, but if you get stuck on one step, the whole plan falls apart.
ADaPT takes a different approach. It breaks down the overall cake-baking task into smaller, more manageable sub-tasks. If the LLM (your "baking assistant") gets stuck on a sub-task, ADaPT will decompose that sub-task further, until it finds something the LLM can handle. This recursive decomposition allows the system to adapt to the complexity of the task and the limitations of the LLM.
The researchers tested ADaPT on several complex, interactive tasks, including a novel dataset called TextCraft, and found that it significantly outperformed established methods, achieving success rates up to 28.3% higher. This shows the value of ADaPT's dynamic, multi-level approach to task planning and execution.
Technical Explanation
ADaPT: As-Needed Decomposition and Planning for complex Tasks introduces a new approach to using large language models (LLMs) for interactive decision-making tasks that require planning and adapting to the environment.
Existing methods fall into two broad categories: iterative executors, which determine the next action iteratively, and plan-and-execute, which generate plans and execute sub-tasks using LLMs. However, these methods struggle with task complexity, as the inability to execute any sub-task may lead to task failure.
To address these shortcomings, the authors introduce ADaPT, which explicitly plans and decomposes complex sub-tasks as-needed, i.e., when the LLM is unable to execute them. ADaPT recursively decomposes sub-tasks to adapt to both task complexity and LLM capability.
The researchers evaluate ADaPT on several complex, interactive tasks, including a novel dataset called TextCraft. Their results demonstrate that ADaPT substantially outperforms established strong baselines, achieving success rates up to 28.3% higher in ALFWorld, 27% in WebShop, and 33% in TextCraft.
Through extensive analysis, the authors illustrate the importance of multilevel decomposition and establish that ADaPT dynamically adjusts to the capabilities of the executor LLM as well as to task complexity.
Critical Analysis
The paper presents a compelling approach to using large language models (LLMs) for complex, interactive tasks that require planning and adaptation. The key strength of ADaPT is its ability to dynamically decompose sub-tasks as needed, which allows it to handle task complexity and adapt to the limitations of the LLM executor.
One potential limitation of the research is the scope of the evaluated tasks. While the authors introduce a novel dataset called TextCraft, the other tasks (ALFWorld and WebShop) may not fully capture the breadth of real-world, interactive decision-making scenarios. It would be valuable to see how ADaPT performs on an even wider range of tasks, including those with more ambiguous or open-ended objectives.
Additionally, the paper does not delve deeply into the computational or memory requirements of ADaPT compared to the baseline methods. As the complexity of tasks and the number of sub-tasks grow, the resource demands of the recursive decomposition process may become a practical concern. Further research into the scalability and efficiency of ADaPT would be useful.
Overall, the ADaPT: As-Needed Decomposition and Planning for complex Tasks paper presents a promising approach to leveraging LLMs for complex, interactive decision-making. The authors have demonstrated the value of their dynamic, multi-level decomposition strategy, and their work opens up exciting avenues for further research in this area.
Conclusion
The ADaPT: As-Needed Decomposition and Planning for complex Tasks paper introduces a novel approach to using large language models (LLMs) for interactive decision-making tasks that require planning and adaptation. By explicitly planning and decomposing complex sub-tasks as needed, ADaPT is able to outperform established methods and achieve significantly higher success rates on a range of challenging tasks.
The key innovation of ADaPT is its ability to dynamically adjust to both task complexity and the capabilities of the LLM executor. This multilevel decomposition strategy allows the system to break down tasks into manageable sub-tasks and recursively adapt as needed, addressing a key limitation of existing approaches.
The successful evaluation of ADaPT on tasks like ALFWorld, WebShop, and the novel TextCraft dataset demonstrates the practical value of this research. As LLMs continue to play a growing role in interactive decision-making, the insights from this paper can help pave the way for more robust and capable systems that can handle complex, real-world challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
MLDT: Multi-Level Decomposition for Complex Long-Horizon Robotic Task Planning with Open-Source Large Language Model
Yike Wu, Jiatao Zhang, Nan Hu, LanLing Tang, Guilin Qi, Jun Shao, Jie Ren, Wei Song
0
0
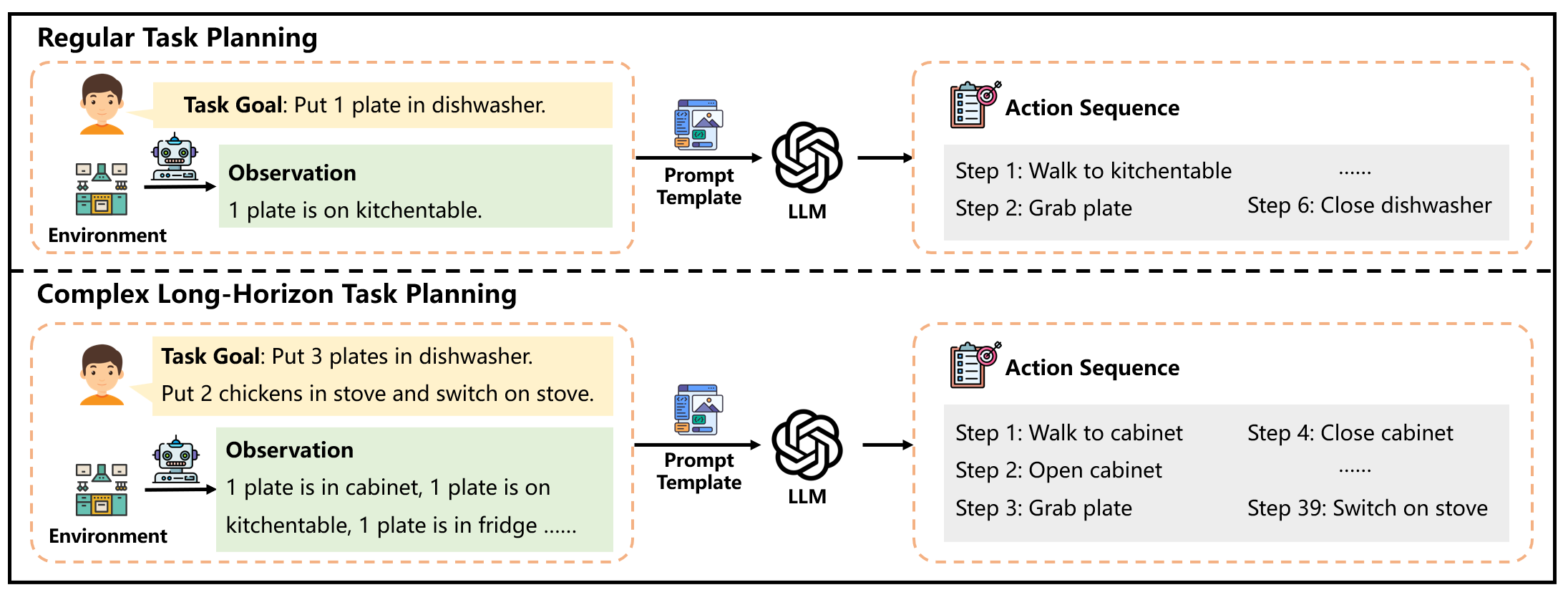
In the realm of data-driven AI technology, the application of open-source large language models (LLMs) in robotic task planning represents a significant milestone. Recent robotic task planning methods based on open-source LLMs typically leverage vast task planning datasets to enhance models' planning abilities. While these methods show promise, they struggle with complex long-horizon tasks, which require comprehending more context and generating longer action sequences. This paper addresses this limitation by proposing MLDT, theMulti-Level Decomposition Task planning method. This method innovatively decomposes tasks at the goal-level, task-level, and action-level to mitigate the challenge of complex long-horizon tasks. In order to enhance open-source LLMs' planning abilities, we introduce a goal-sensitive corpus generation method to create high-quality training data and conduct instruction tuning on the generated corpus. Since the complexity of the existing datasets is not high enough, we construct a more challenging dataset, LongTasks, to specifically evaluate planning ability on complex long-horizon tasks. We evaluate our method using various LLMs on four datasets in VirtualHome. Our results demonstrate a significant performance enhancement in robotic task planning, showcasing MLDT's effectiveness in overcoming the limitations of existing methods based on open-source LLMs as well as its practicality in complex, real-world scenarios.
4/3/2024
💬
Action Contextualization: Adaptive Task Planning and Action Tuning using Large Language Models
Sthithpragya Gupta, Kunpeng Yao, Loic Niederhauser, Aude Billard
0
0
Large Language Models (LLMs) present a promising frontier in robotic task planning by leveraging extensive human knowledge. Nevertheless, the current literature often overlooks the critical aspects of adaptability and error correction within robotic systems. This work aims to overcome this limitation by enabling robots to modify their motion strategies and select the most suitable task plans based on the context. We introduce a novel framework termed action contextualization, aimed at tailoring robot actions to the precise requirements of specific tasks, thereby enhancing adaptability through applying LLM-derived contextual insights. Our proposed motion metrics guarantee the feasibility and efficiency of adjusted motions, which evaluate robot performance and eliminate planning redundancies. Moreover, our framework supports online feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of errors. Our framework has achieved an overall success rate of 81.25% through extensive validation. Finally, integrated with dynamic system (DS)-based robot controllers, the robotic arm-hand system demonstrates its proficiency in autonomously executing LLM-generated motion plans for sequential table-clearing tasks, rectifying errors without human intervention, and completing tasks, showcasing robustness against external disturbances. Our proposed framework features the potential to be integrated with modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
4/23/2024
💬
DELTA: Decomposed Efficient Long-Term Robot Task Planning using Large Language Models
Yuchen Liu, Luigi Palmieri, Sebastian Koch, Ilche Georgievski, Marco Aiello
0
0
Recent advancements in Large Language Models (LLMs) have sparked a revolution across various research fields. In particular, the integration of common-sense knowledge from LLMs into robot task and motion planning has been proven to be a game-changer, elevating performance in terms of explainability and downstream task efficiency to unprecedented heights. However, managing the vast knowledge encapsulated within these large models has posed challenges, often resulting in infeasible plans generated by LLM-based planning systems due to hallucinations or missing domain information. To overcome these challenges and obtain even greater planning feasibility and computational efficiency, we propose a novel LLM-driven task planning approach called DELTA. For achieving better grounding from environmental topology into actionable knowledge, DELTA leverages the power of scene graphs as environment representations within LLMs, enabling the fast generation of precise planning problem descriptions. For obtaining higher planning performance, we use LLMs to decompose the long-term task goals into an autoregressive sequence of sub-goals for an automated task planner to solve. Our contribution enables a more efficient and fully automatic task planning pipeline, achieving higher planning success rates and significantly shorter planning times compared to the state of the art.
4/5/2024
NL2Plan: Robust LLM-Driven Planning from Minimal Text Descriptions
Elliot Gestrin, Marco Kuhlmann, Jendrik Seipp
0
0
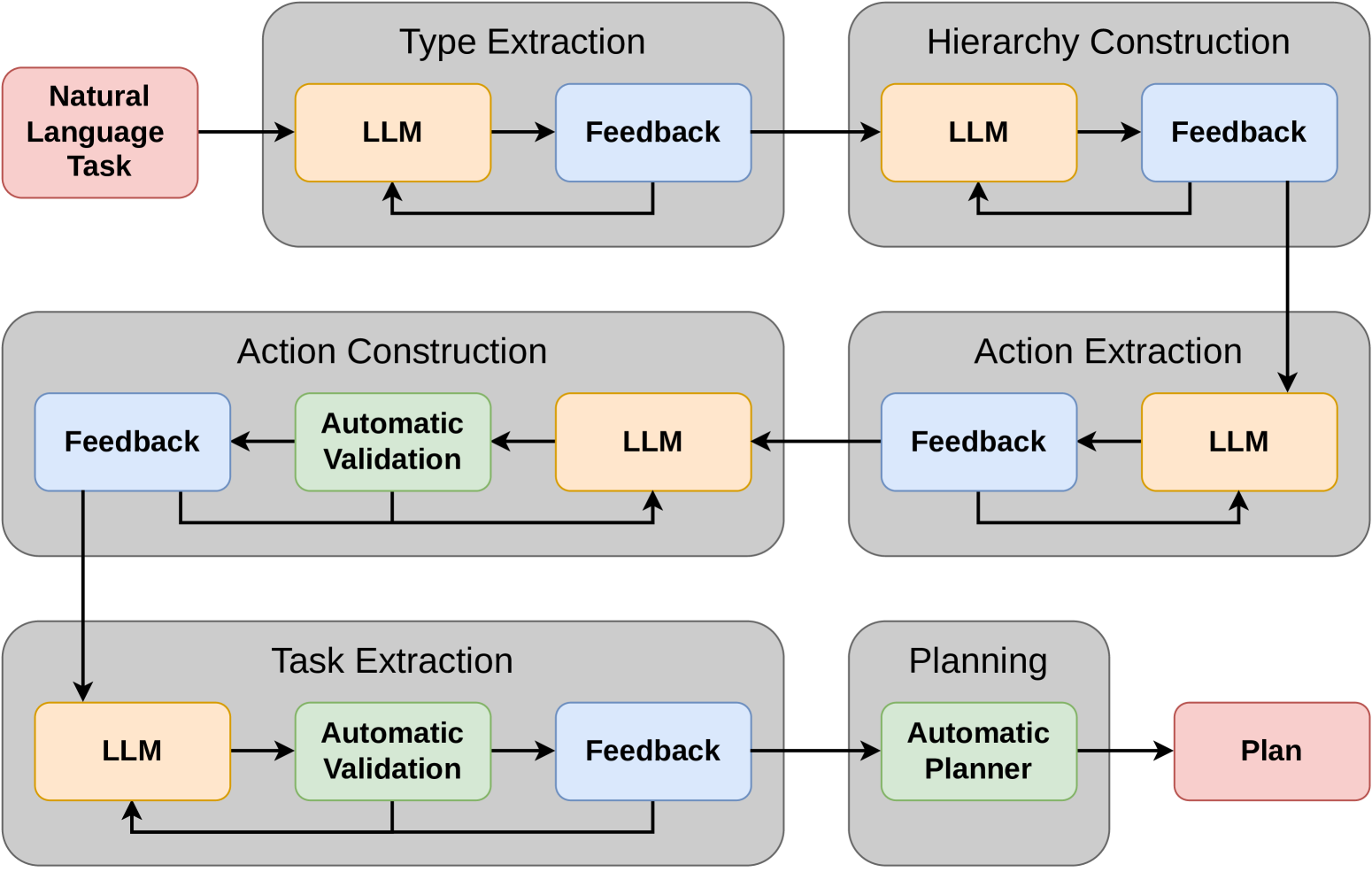
Today's classical planners are powerful, but modeling input tasks in formats such as PDDL is tedious and error-prone. In contrast, planning with Large Language Models (LLMs) allows for almost any input text, but offers no guarantees on plan quality or even soundness. In an attempt to merge the best of these two approaches, some work has begun to use LLMs to automate parts of the PDDL creation process. However, these methods still require various degrees of expert input. We present NL2Plan, the first domain-agnostic offline LLM-driven planning system. NL2Plan uses an LLM to incrementally extract the necessary information from a short text prompt before creating a complete PDDL description of both the domain and the problem, which is finally solved by a classical planner. We evaluate NL2Plan on four planning domains and find that it solves 10 out of 15 tasks - a clear improvement over a plain chain-of-thought reasoning LLM approach, which only solves 2 tasks. Moreover, in two out of the five failure cases, instead of returning an invalid plan, NL2Plan reports that it failed to solve the task. In addition to using NL2Plan in end-to-end mode, users can inspect and correct all of its intermediate results, such as the PDDL representation, increasing explainability and making it an assistive tool for PDDL creation.
5/8/2024