Action Contextualization: Adaptive Task Planning and Action Tuning using Large Language Models
2404.13191
0
0
💬
Abstract
Large Language Models (LLMs) present a promising frontier in robotic task planning by leveraging extensive human knowledge. Nevertheless, the current literature often overlooks the critical aspects of adaptability and error correction within robotic systems. This work aims to overcome this limitation by enabling robots to modify their motion strategies and select the most suitable task plans based on the context. We introduce a novel framework termed action contextualization, aimed at tailoring robot actions to the precise requirements of specific tasks, thereby enhancing adaptability through applying LLM-derived contextual insights. Our proposed motion metrics guarantee the feasibility and efficiency of adjusted motions, which evaluate robot performance and eliminate planning redundancies. Moreover, our framework supports online feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of errors. Our framework has achieved an overall success rate of 81.25% through extensive validation. Finally, integrated with dynamic system (DS)-based robot controllers, the robotic arm-hand system demonstrates its proficiency in autonomously executing LLM-generated motion plans for sequential table-clearing tasks, rectifying errors without human intervention, and completing tasks, showcasing robustness against external disturbances. Our proposed framework features the potential to be integrated with modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
Create account to get full access
Overview
- Explores using large language models (LLMs) to enhance robotic task planning and adaptability
- Introduces a novel "action contextualization" framework to tailor robot actions to specific task requirements
- Focuses on improving robot adaptability, error correction, and performance through LLM-derived contextual insights
- Validated through extensive testing, achieving an 81.25% success rate
- Demonstrates proficiency in autonomous execution of LLM-generated motion plans for sequential table-clearing tasks
Plain English Explanation
Large language models (LLMs) are powerful artificial intelligence systems that have been trained on vast amounts of human-generated text. Researchers are exploring ways to leverage this extensive knowledge to help robots plan and execute tasks more effectively.
This work aims to address a key limitation in the current literature – the lack of focus on adaptability and error correction within robotic systems. The researchers introduce a new framework called "action contextualization" that allows robots to modify their motion strategies and select the most suitable task plans based on the specific context of the situation.
The framework uses LLM-derived insights to tailor the robot's actions to the precise requirements of each task. This helps the robot adapt more easily to changes in the environment or task requirements. The researchers also developed metrics to ensure the feasibility and efficiency of the adjusted motions, evaluating the robot's performance and eliminating unnecessary planning.
Additionally, the framework supports real-time feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of any errors that arise. This allows the robot to autonomously rectify mistakes without human intervention.
Through extensive testing, the researchers demonstrated the framework's effectiveness, achieving an impressive 81.25% success rate. They also integrated the framework with a robot arm-hand system, showing its ability to autonomously execute LLM-generated motion plans for sequential table-clearing tasks, handle external disturbances, and complete the tasks without human assistance.
The researchers believe this framework has the potential to be integrated with other modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
Technical Explanation
The paper introduces a novel framework called "action contextualization" that aims to improve the adaptability and error correction capabilities of robotic systems by leveraging the extensive knowledge contained in large language models (LLMs).
The framework works by tailoring the robot's actions to the specific requirements of each task, using contextual insights derived from the LLM. This is achieved through several key components:
-
Motion Metrics: The researchers developed metrics to evaluate the feasibility and efficiency of the adjusted motions, ensuring the robot's performance is optimized and unnecessary planning is eliminated.
-
Online Feedback: The framework supports real-time feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of any errors that arise.
-
Robotic Validation: The researchers extensively validated the framework, achieving an overall success rate of 81.25% across a range of test scenarios.
-
Autonomous Execution: When integrated with a robotic arm-hand system, the framework demonstrated the robot's ability to autonomously execute LLM-generated motion plans for sequential table-clearing tasks, rectify errors without human intervention, and complete the tasks while being robust to external disturbances.
The researchers believe this framework has the potential to be integrated with other modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
Critical Analysis
The paper presents a promising approach to improving robotic adaptability and error correction through the use of large language models (LLMs). The researchers have identified a critical gap in the literature and have developed a novel framework to address it.
One potential limitation of the research is the scope of the validation, which was primarily focused on table-clearing tasks. While these tasks provide a reasonable test case, it would be valuable to see the framework's performance and generalizability across a wider range of robotic applications.
Additionally, the paper does not delve deeply into the potential challenges or limitations of integrating LLMs into robotic systems. Issues such as the reliability, interpretability, and computational requirements of LLMs could be important considerations that warrant further exploration.
Another area for further research could be the exploration of more advanced feedback mechanisms between the robot and the LLM. While the current framework supports online error correction, more sophisticated approaches, such as the use of multi-modal feedback or hierarchical task planning, may further enhance the system's adaptability and autonomy.
Overall, the paper presents a compelling approach to leveraging the power of LLMs for improving robotic task planning and execution. The action contextualization framework is a significant step forward in enhancing robot adaptability and autonomy, and the researchers' validation results are promising. Continued research in this direction could lead to transformative advancements in the field of robotics.
Conclusion
This work introduces a novel framework called "action contextualization" that leverages large language models (LLMs) to enhance the adaptability and error correction capabilities of robotic systems. By tailoring the robot's actions to the specific requirements of each task, using contextual insights derived from the LLM, the framework enables robots to modify their motion strategies and select the most suitable task plans based on the context.
The researchers have validated the framework through extensive testing, achieving an impressive 81.25% success rate. When integrated with a robotic arm-hand system, the framework demonstrated the robot's ability to autonomously execute LLM-generated motion plans for sequential table-clearing tasks, rectify errors without human intervention, and complete the tasks while being robust to external disturbances.
The potential of this framework lies in its ability to be integrated with other modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution. As the field of robotics continues to evolve, the integration of LLMs and contextual reasoning represents a promising frontier for improving the versatility and reliability of robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

LLM-based Robot Task Planning with Exceptional Handling for General Purpose Service Robots
Ruoyu Wang, Zhipeng Yang, Zinan Zhao, Xinyan Tong, Zhi Hong, Kun Qian
0
0
The development of a general purpose service robot for daily life necessitates the robot's ability to deploy a myriad of fundamental behaviors judiciously. Recent advancements in training Large Language Models (LLMs) can be used to generate action sequences directly, given an instruction in natural language with no additional domain information. However, while the outputs of LLMs are semantically correct, the generated task plans may not accurately map to acceptable actions and might encompass various linguistic ambiguities. LLM hallucinations pose another challenge for robot task planning, which results in content that is inconsistent with real-world facts or user inputs. In this paper, we propose a task planning method based on a constrained LLM prompt scheme, which can generate an executable action sequence from a command. An exceptional handling module is further proposed to deal with LLM hallucinations problem. This module can ensure the LLM-generated results are admissible in the current environment. We evaluate our method on the commands generated by the RoboCup@Home Command Generator, observing that the robot demonstrates exceptional performance in both comprehending instructions and executing tasks.
5/27/2024
💬
A Framework for Neurosymbolic Robot Action Planning using Large Language Models
Alessio Capitanelli, Fulvio Mastrogiovanni
0
0
Symbolic task planning is a widely used approach to enforce robot autonomy due to its ease of understanding and deployment in robot architectures. However, techniques for symbolic task planning are difficult to scale in real-world, human-robot collaboration scenarios because of the poor performance in complex planning domains or when frequent re-planning is needed. We present a framework, Teriyaki, specifically aimed at bridging the gap between symbolic task planning and machine learning approaches. The rationale is training Large Language Models (LLMs), namely GPT-3, into a neurosymbolic task planner compatible with the Planning Domain Definition Language (PDDL), and then leveraging its generative capabilities to overcome a number of limitations inherent to symbolic task planners. Potential benefits include (i) a better scalability in so far as the planning domain complexity increases, since LLMs' response time linearly scales with the combined length of the input and the output, and (ii) the ability to synthesize a plan action-by-action instead of end-to-end, making each action available for execution as soon as it is generated instead of waiting for the whole plan to be available, which in turn enables concurrent planning and execution. Recently, significant efforts have been devoted by the research community to evaluate the cognitive capabilities of LLMs, with alternate successes. Instead, with Teriyaki we aim to provide an overall planning performance comparable to traditional planners in specific planning domains, while leveraging LLMs capabilities to build a look-ahead predictive planning model. Preliminary results in selected domains show that our method can: (i) solve 95.5% of problems in a test data set of 1,000 samples; (ii) produce plans up to 13.5% shorter than a traditional symbolic planner; (iii) reduce average overall waiting times for a plan availability by up to 61.4%
6/5/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
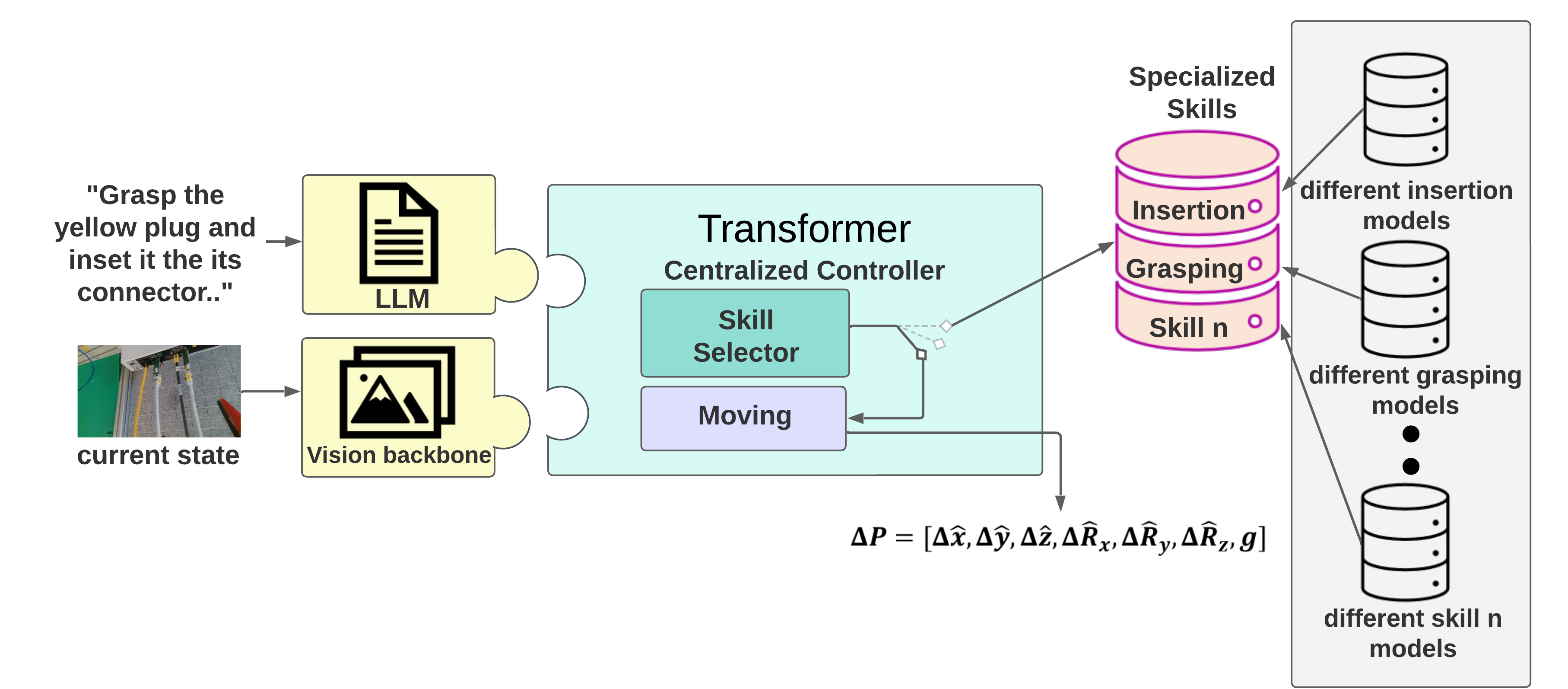
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024

LLM-BT: Performing Robotic Adaptive Tasks based on Large Language Models and Behavior Trees
Haotian Zhou, Yunhan Lin, Longwu Yan, Jihong Zhu, Huasong Min
0
0
Large Language Models (LLMs) have been widely utilized to perform complex robotic tasks. However, handling external disturbances during tasks is still an open challenge. This paper proposes a novel method to achieve robotic adaptive tasks based on LLMs and Behavior Trees (BTs). It utilizes ChatGPT to reason the descriptive steps of tasks. In order to enable ChatGPT to understand the environment, semantic maps are constructed by an object recognition algorithm. Then, we design a Parser module based on Bidirectional Encoder Representations from Transformers (BERT) to parse these steps into initial BTs. Subsequently, a BTs Update algorithm is proposed to expand the initial BTs dynamically to control robots to perform adaptive tasks. Different from other LLM-based methods for complex robotic tasks, our method outputs variable BTs that can add and execute new actions according to environmental changes, which is robust to external disturbances. Our method is validated with simulation in different practical scenarios.
4/9/2024