DELTA: Decomposed Efficient Long-Term Robot Task Planning using Large Language Models
2404.03275
0
0
💬
Abstract
Recent advancements in Large Language Models (LLMs) have sparked a revolution across various research fields. In particular, the integration of common-sense knowledge from LLMs into robot task and motion planning has been proven to be a game-changer, elevating performance in terms of explainability and downstream task efficiency to unprecedented heights. However, managing the vast knowledge encapsulated within these large models has posed challenges, often resulting in infeasible plans generated by LLM-based planning systems due to hallucinations or missing domain information. To overcome these challenges and obtain even greater planning feasibility and computational efficiency, we propose a novel LLM-driven task planning approach called DELTA. For achieving better grounding from environmental topology into actionable knowledge, DELTA leverages the power of scene graphs as environment representations within LLMs, enabling the fast generation of precise planning problem descriptions. For obtaining higher planning performance, we use LLMs to decompose the long-term task goals into an autoregressive sequence of sub-goals for an automated task planner to solve. Our contribution enables a more efficient and fully automatic task planning pipeline, achieving higher planning success rates and significantly shorter planning times compared to the state of the art.
Create account to get full access
Overview
- Recent advancements in Large Language Models (LLMs) have revolutionized various research fields.
- Integrating common-sense knowledge from LLMs into robot task and motion planning has significantly improved performance in terms of explainability and efficiency.
- However, managing the vast knowledge in these large models has posed challenges, often leading to infeasible plans due to hallucinations or missing domain information.
- To overcome these challenges and enhance planning feasibility and efficiency, the researchers propose a novel LLM-driven task planning approach called DELTA.
Plain English Explanation
Large language models (LLMs) are powerful AI systems that can understand and generate human-like text. Researchers have found that incorporating the common-sense knowledge from these LLMs can greatly improve the performance of robotic task planning and execution. For example, a robot might be able to better understand the context of a situation and plan more efficient and sensible actions.
However, managing all the information contained in these large models has proven to be a challenge. Sometimes, the robot's plans end up being unrealistic or impractical because the model has made incorrect assumptions or is missing important details about the environment.
The researchers in this paper have developed a new approach called DELTA to address these issues. DELTA uses the information in LLMs in a more structured way, leveraging something called "scene graphs" to better represent the environment and the robot's understanding of it. This helps the robot generate more accurate and feasible plans.
DELTA also breaks down the robot's overall task into a sequence of smaller, more manageable sub-goals that the robot can tackle one by one. This makes the planning process more efficient and successful compared to previous methods.
Overall, this research represents an important step forward in using powerful language models to enhance the capabilities of robotic systems, making them more intelligent, reliable, and useful in real-world applications.
Technical Explanation
The key elements of the DELTA approach are:
-
Environment Representation: DELTA uses scene graphs as a structured representation of the environment, which enables the LLM to better ground its knowledge and generate more precise planning problem descriptions.
-
Task Decomposition: DELTA employs the LLM to decompose long-term task goals into an autoregressive sequence of sub-goals, which the automated task planner can then more easily solve.
The researchers conducted experiments to evaluate the performance of DELTA compared to state-of-the-art planning approaches. They found that DELTA achieved higher planning success rates and significantly shorter planning times, demonstrating its effectiveness in overcoming the challenges posed by managing the vast knowledge in LLMs.
Critical Analysis
The paper acknowledges that while DELTA represents an advancement in LLM-driven task planning, there are still some limitations and areas for further research. For example, the authors mention that the current implementation assumes a known environment topology, and incorporating more dynamic and uncertain environments could be an interesting future direction.
Additionally, the paper does not delve into potential issues around the interpretability and reliability of the LLM-based planning system. As these models become more prevalent in high-stakes applications, it will be crucial to address concerns about their transparency and robustness.
Overall, the DELTA approach is a promising step forward, but continued research and development will be necessary to fully realize the potential of integrating common-sense knowledge from LLMs into real-world robotic systems.
Conclusion
This research demonstrates how advancements in large language models can be leveraged to significantly improve the performance and efficiency of robot task planning. By combining the power of LLMs with structured representations of the environment and task decomposition, the DELTA approach overcomes key challenges in managing the vast knowledge within these large models.
The implications of this work extend beyond robotics, as the principles and techniques developed here could potentially be applied to other domains that rely on AI-driven planning and decision-making. As language models continue to evolve, integrating their common-sense understanding with specialized task-solving capabilities promises to unlock new frontiers in artificial intelligence and its real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
MLDT: Multi-Level Decomposition for Complex Long-Horizon Robotic Task Planning with Open-Source Large Language Model
Yike Wu, Jiatao Zhang, Nan Hu, LanLing Tang, Guilin Qi, Jun Shao, Jie Ren, Wei Song
0
0
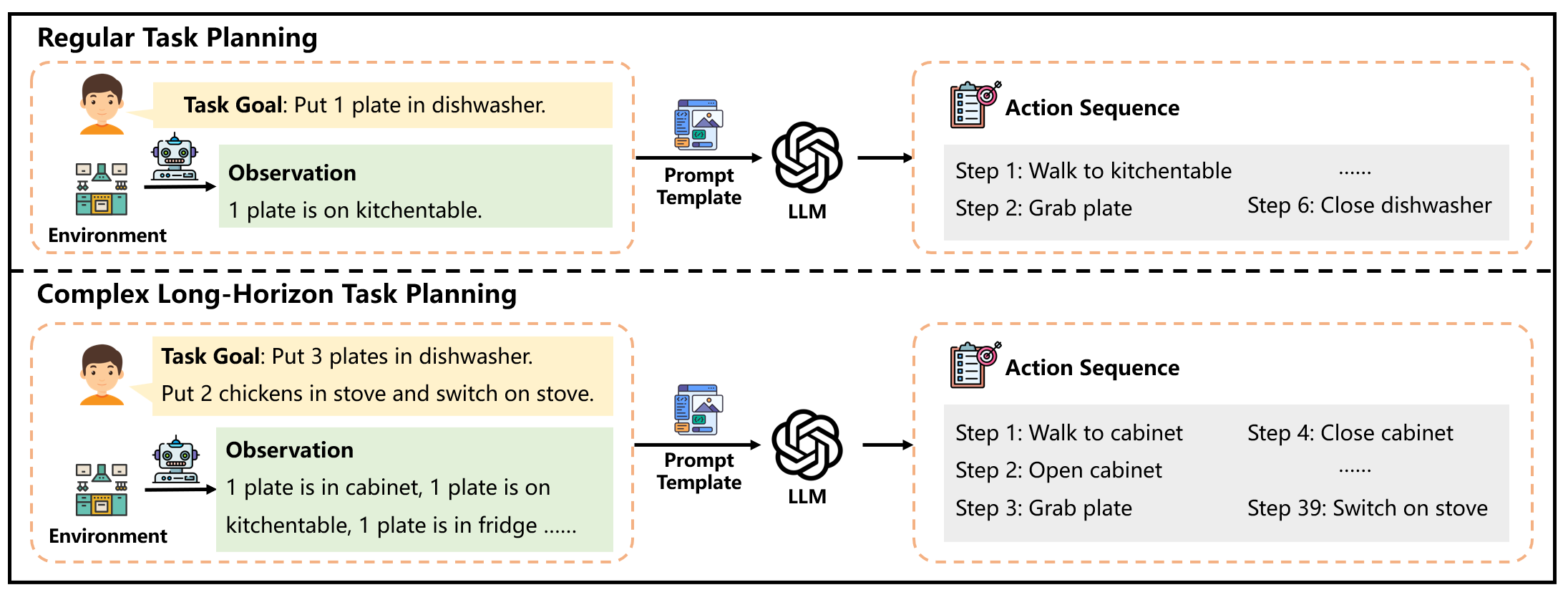
In the realm of data-driven AI technology, the application of open-source large language models (LLMs) in robotic task planning represents a significant milestone. Recent robotic task planning methods based on open-source LLMs typically leverage vast task planning datasets to enhance models' planning abilities. While these methods show promise, they struggle with complex long-horizon tasks, which require comprehending more context and generating longer action sequences. This paper addresses this limitation by proposing MLDT, theMulti-Level Decomposition Task planning method. This method innovatively decomposes tasks at the goal-level, task-level, and action-level to mitigate the challenge of complex long-horizon tasks. In order to enhance open-source LLMs' planning abilities, we introduce a goal-sensitive corpus generation method to create high-quality training data and conduct instruction tuning on the generated corpus. Since the complexity of the existing datasets is not high enough, we construct a more challenging dataset, LongTasks, to specifically evaluate planning ability on complex long-horizon tasks. We evaluate our method using various LLMs on four datasets in VirtualHome. Our results demonstrate a significant performance enhancement in robotic task planning, showcasing MLDT's effectiveness in overcoming the limitations of existing methods based on open-source LLMs as well as its practicality in complex, real-world scenarios.
4/3/2024
💬
Large Language Models as Planning Domain Generators
James Oswald, Kavitha Srinivas, Harsha Kokel, Junkyu Lee, Michael Katz, Shirin Sohrabi
0
0
Developing domain models is one of the few remaining places that require manual human labor in AI planning. Thus, in order to make planning more accessible, it is desirable to automate the process of domain model generation. To this end, we investigate if large language models (LLMs) can be used to generate planning domain models from simple textual descriptions. Specifically, we introduce a framework for automated evaluation of LLM-generated domains by comparing the sets of plans for domain instances. Finally, we perform an empirical analysis of 7 large language models, including coding and chat models across 9 different planning domains, and under three classes of natural language domain descriptions. Our results indicate that LLMs, particularly those with high parameter counts, exhibit a moderate level of proficiency in generating correct planning domains from natural language descriptions. Our code is available at https://github.com/IBM/NL2PDDL.
5/14/2024
💬
Action Contextualization: Adaptive Task Planning and Action Tuning using Large Language Models
Sthithpragya Gupta, Kunpeng Yao, Loic Niederhauser, Aude Billard
0
0
Large Language Models (LLMs) present a promising frontier in robotic task planning by leveraging extensive human knowledge. Nevertheless, the current literature often overlooks the critical aspects of adaptability and error correction within robotic systems. This work aims to overcome this limitation by enabling robots to modify their motion strategies and select the most suitable task plans based on the context. We introduce a novel framework termed action contextualization, aimed at tailoring robot actions to the precise requirements of specific tasks, thereby enhancing adaptability through applying LLM-derived contextual insights. Our proposed motion metrics guarantee the feasibility and efficiency of adjusted motions, which evaluate robot performance and eliminate planning redundancies. Moreover, our framework supports online feedback between the robot and the LLM, enabling immediate modifications to the task plans and corrections of errors. Our framework has achieved an overall success rate of 81.25% through extensive validation. Finally, integrated with dynamic system (DS)-based robot controllers, the robotic arm-hand system demonstrates its proficiency in autonomously executing LLM-generated motion plans for sequential table-clearing tasks, rectifying errors without human intervention, and completing tasks, showcasing robustness against external disturbances. Our proposed framework features the potential to be integrated with modular control approaches, significantly enhancing robots' adaptability and autonomy in sequential task execution.
4/23/2024
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
0
0
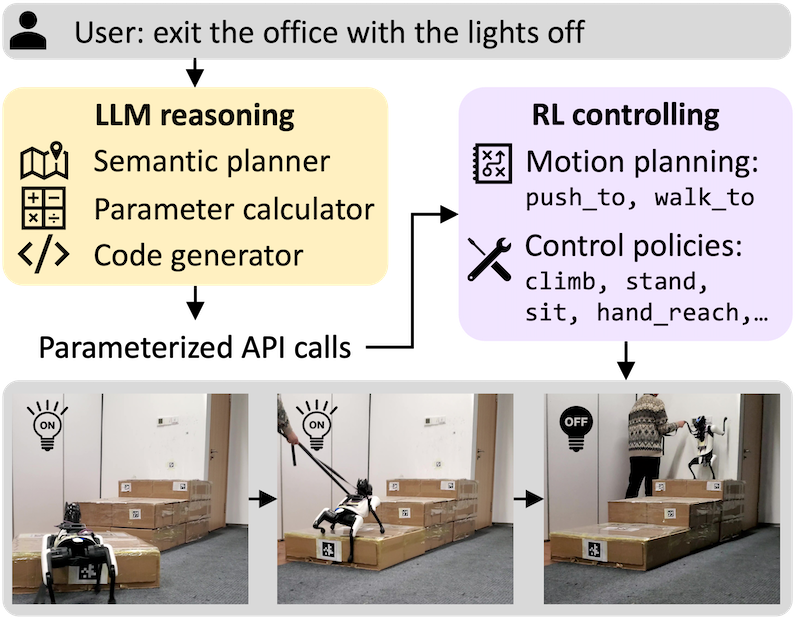
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
4/9/2024