Adapting CNNs for Fisheye Cameras without Retraining
2404.08187
0
0
Abstract
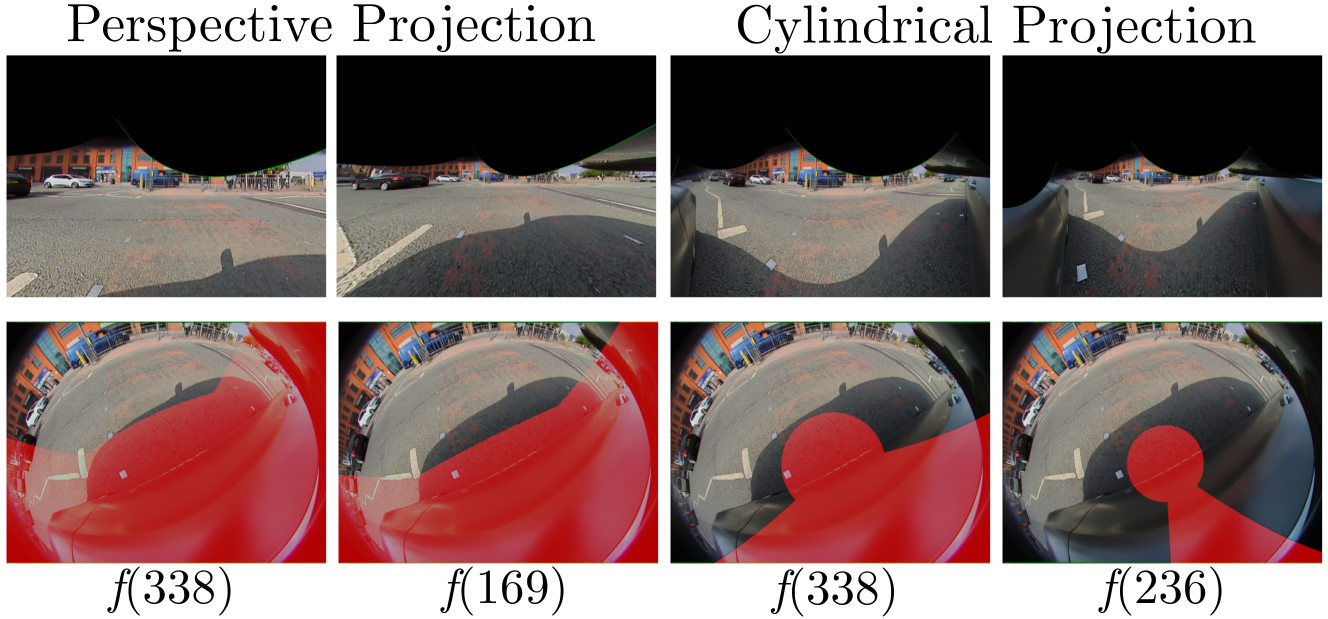
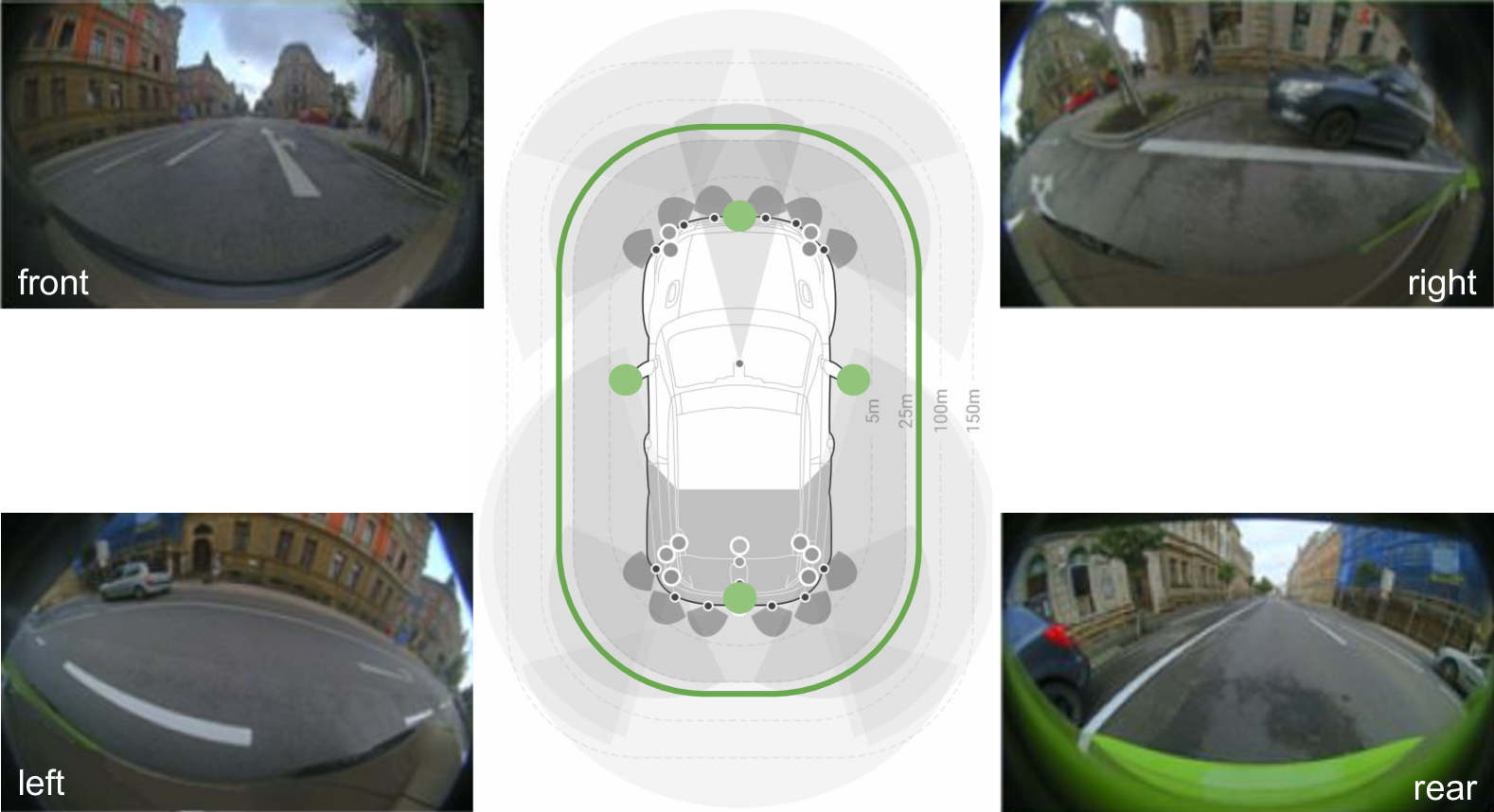
The majority of image processing approaches assume images are in or can be rectified to a perspective projection. However, in many applications it is beneficial to use non conventional cameras, such as fisheye cameras, that have a larger field of view (FOV). The issue arises that these large-FOV images can't be rectified to a perspective projection without significant cropping of the original image. To address this issue we propose Rectified Convolutions (RectConv); a new approach for adapting pre-trained convolutional networks to operate with new non-perspective images, without any retraining. Replacing the convolutional layers of the network with RectConv layers allows the network to see both rectified patches and the entire FOV. We demonstrate RectConv adapting multiple pre-trained networks to perform segmentation and detection on fisheye imagery from two publicly available datasets. Our approach requires no additional data or training, and operates directly on the native image as captured from the camera. We believe this work is a step toward adapting the vast resources available for perspective images to operate across a broad range of camera geometries.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper explores a technique called "Rectified Convolutions" that can adapt Convolutional Neural Networks (CNNs) to work with fisheye camera images without the need for retraining.
- Fisheye cameras have a wide field of view and produce distorted images, which can be challenging for CNNs trained on regular, undistorted images.
- The proposed method applies a rectification transformation to the convolutional kernels of a pre-trained CNN, allowing it to process fisheye camera images effectively.
Plain English Explanation
Convolutional Neural Networks (CNNs) are a powerful type of machine learning model that are often used for tasks like image recognition. However, CNNs can struggle with images captured by fisheye cameras, which have a very wide field of view and produce distorted images.
The researchers in this paper developed a technique called "Rectified Convolutions" that can adapt pre-trained CNNs to work well with fisheye camera images, without the need to retrain the entire model from scratch. The key idea is to apply a special transformation to the convolutional filters (or "kernels") inside the CNN, which effectively undistorts the image before it goes through the rest of the model.
This is useful because it means you can take a CNN that has already been trained on regular, non-fisheye images, and use it to process fisheye camera images with good performance, without having to go through the expensive and time-consuming process of retraining the entire model. The rectification transformation essentially "corrects" the distortion in the fisheye images, allowing the pre-trained CNN to make accurate predictions.
The authors demonstrate the effectiveness of their Rectified Convolutions approach on several computer vision tasks, including object detection and semantic segmentation, showing that it can match or outperform models that were specifically trained on fisheye camera data.
Technical Explanation
The paper proposes a technique called "Rectified Convolutions" that can adapt Convolutional Neural Networks (CNNs) to process images from fisheye cameras without the need for retraining.
Fisheye cameras have a very wide field of view, which results in significant distortion in the captured images. This can be problematic for CNNs, which are typically trained on regular, undistorted images. To address this, the authors introduce a rectification transformation that is applied to the convolutional kernels of a pre-trained CNN.
The rectification transformation essentially "undistorts" the convolutional kernels, allowing the CNN to effectively process the distorted fisheye images. Importantly, this transformation is applied only to the convolutional kernels, not the entire CNN model. This means the pre-trained model parameters can be retained, avoiding the need for full retraining on fisheye data.
The authors demonstrate the effectiveness of their Rectified Convolutions approach on several computer vision tasks, including object detection and semantic segmentation. They show that the adapted CNNs can match or outperform models that were specifically trained on fisheye camera data, while leveraging the knowledge learned from the original training on regular images.
Critical Analysis
The Rectified Convolutions approach presented in this paper is a clever and practical solution to the problem of using pre-trained CNNs with fisheye camera images. By focusing on adapting the convolutional kernels rather than retraining the entire model, the authors have developed a efficient and effective way to leverage existing CNN models for this task.
One potential limitation of the approach is that it may not be able to fully account for all the distortion effects introduced by fisheye lenses, particularly in the more extreme regions of the image. The authors acknowledge this and suggest that combining their method with other techniques, such as distortion-aware models, could lead to further improvements.
Additionally, the performance of the adapted CNNs may still fall short of models that were trained specifically on fisheye data, especially for highly complex tasks or applications that require very precise geometric understanding. Further research could explore ways to bridge this gap, perhaps by incorporating additional rectification or augmentation techniques into the Rectified Convolutions method.
Overall, the Rectified Convolutions approach represents a valuable contribution to the field of computer vision, providing a practical solution for adapting pre-trained CNNs to work with fisheye camera images. As the use of fisheye and other wide-angle cameras continues to grow, this type of technique will become increasingly important for enabling the deployment of powerful deep learning models in real-world applications.
Conclusion
The paper presents a novel technique called "Rectified Convolutions" that can adapt pre-trained Convolutional Neural Networks (CNNs) to effectively process images from fisheye cameras, without the need for full retraining. By applying a rectification transformation to the convolutional kernels, the method is able to "undo" the distortion introduced by the fisheye lens, allowing the CNN to make accurate predictions on the corrected input.
This approach is particularly useful in situations where it is not feasible or practical to retrain an entire CNN model from scratch on fisheye camera data. By leveraging the knowledge encoded in a pre-trained model, the Rectified Convolutions method provides a efficient and effective way to deploy powerful deep learning techniques in applications involving fisheye or other wide-angle cameras, such as robotics, autonomous vehicles, and medical imaging.
As the use of these specialized camera types continues to grow, techniques like Rectified Convolutions will become increasingly important for enabling the widespread adoption of deep learning models in real-world scenarios, while also helping to overcome the challenges posed by adversarial attacks and other constraints in active vision systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
Location-guided Head Pose Estimation for Fisheye Image
Bing Li, Dong Zhang, Cheng Huang, Yun Xian, Ming Li, Dah-Jye Lee
0
0
Camera with a fisheye or ultra-wide lens covers a wide field of view that cannot be modeled by the perspective projection. Serious fisheye lens distortion in the peripheral region of the image leads to degraded performance of the existing head pose estimation models trained on undistorted images. This paper presents a new approach for head pose estimation that uses the knowledge of head location in the image to reduce the negative effect of fisheye distortion. We develop an end-to-end convolutional neural network to estimate the head pose with the multi-task learning of head pose and head location. Our proposed network estimates the head pose directly from the fisheye image without the operation of rectification or calibration. We also created a fisheye-distorted version of the three popular head pose estimation datasets, BIWI, 300W-LP, and AFLW2000 for our experiments. Experiments results show that our network remarkably improves the accuracy of head pose estimation compared with other state-of-the-art one-stage and two-stage methods.
4/11/2024
FisheyeDetNet: Object Detection on Fisheye Surround View Camera Systems for Automated Driving
Ganesh Sistu, Senthil Yogamani
0
0
Object detection is a mature problem in autonomous driving with pedestrian detection being one of the first deployed algorithms. It has been comprehensively studied in the literature. However, object detection is relatively less explored for fisheye cameras used for surround-view near field sensing. The standard bounding box representation fails in fisheye cameras due to heavy radial distortion, particularly in the periphery. To mitigate this, we explore extending the standard object detection output representation of bounding box. We design rotated bounding boxes, ellipse, generic polygon as polar arc/angle representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model FisheyeDetNet with polygon outperforms others and achieves a mAP score of 49.5 % on Valeo fisheye surround-view dataset for automated driving applications. This dataset has 60K images captured from 4 surround-view cameras across Europe, North America and Asia. To the best of our knowledge, this is the first detailed study on object detection on fisheye cameras for autonomous driving scenarios.
4/30/2024
🛠️
A Comprehensive Overview of Fish-Eye Camera Distortion Correction Methods
Jian Xu, De-Wei Han, Kang Li, Jun-Jie Li, Zhao-Yuan Ma
0
0
The fisheye camera, with its unique wide field of view and other characteristics, has found extensive applications in various fields. However, the fisheye camera suffers from significant distortion compared to pinhole cameras, resulting in distorted images of captured objects. Fish-eye camera distortion is a common issue in digital image processing, requiring effective correction techniques to enhance image quality. This review provides a comprehensive overview of various methods used for fish-eye camera distortion correction. The article explores the polynomial distortion model, which utilizes polynomial functions to model and correct radial distortions. Additionally, alternative approaches such as panorama mapping, grid mapping, direct methods, and deep learning-based methods are discussed. The review highlights the advantages, limitations, and recent advancements of each method, enabling readers to make informed decisions based on their specific needs.
5/14/2024
Overcoming Scene Context Constraints for Object Detection in wild using Defilters
Vamshi Krishna Kancharla, Neelam sinha
0
0
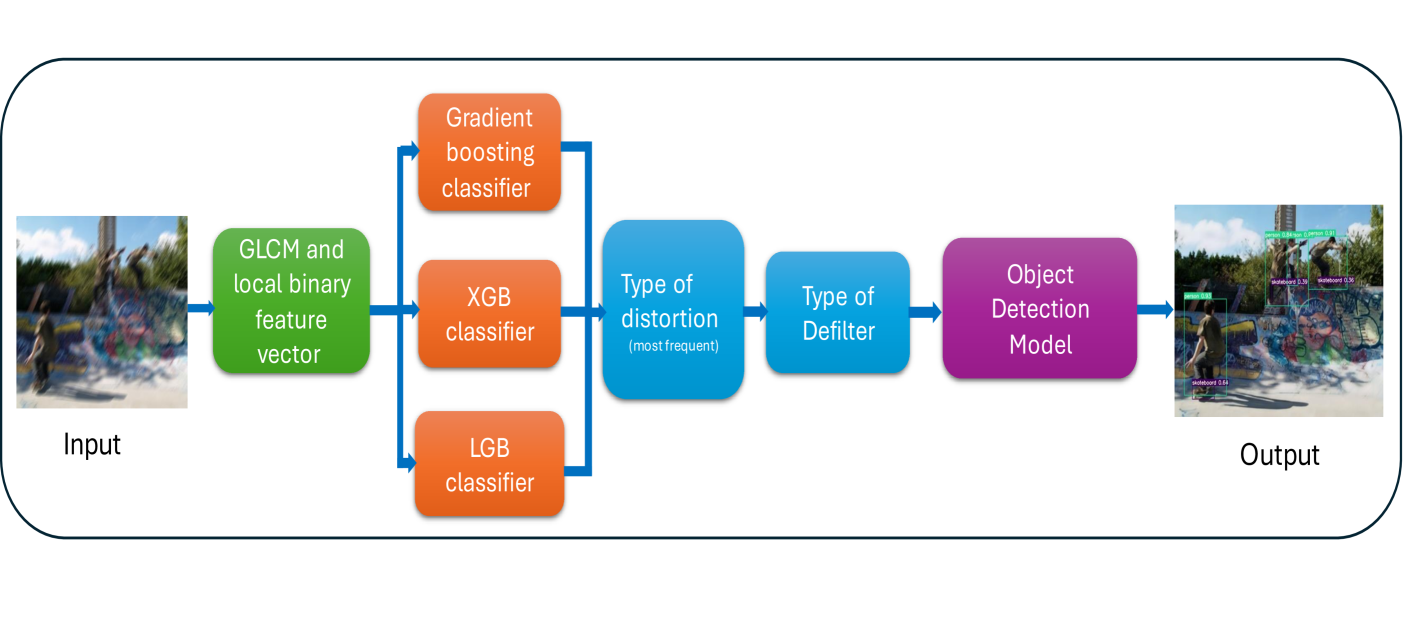
This paper focuses on improving object detection performance by addressing the issue of image distortions, commonly encountered in uncontrolled acquisition environments. High-level computer vision tasks such as object detection, recognition, and segmentation are particularly sensitive to image distortion. To address this issue, we propose a novel approach employing an image defilter to rectify image distortion prior to object detection. This method enhances object detection accuracy, as models perform optimally when trained on non-distorted images. Our experiments demonstrate that utilizing defiltered images significantly improves mean average precision compared to training object detection models on distorted images. Consequently, our proposed method offers considerable benefits for real-world applications plagued by image distortion. To our knowledge, the contribution lies in employing distortion-removal paradigm for object detection on images captured in natural settings. We achieved an improvement of 0.562 and 0.564 of mean Average precision on validation and test data.
4/15/2024