FisheyeDetNet: Object Detection on Fisheye Surround View Camera Systems for Automated Driving

0
Sign in to get full access
Overview
- This paper presents FisheyeDetNet, a novel object detection system for automated driving using fisheye surround view camera systems.
- The authors address the challenges of object detection on fisheye cameras, which introduce significant distortion and require a new approach compared to standard perspective cameras.
- The proposed FisheyeDetNet architecture leverages specialized modules to handle fisheye distortion and achieve accurate object detection performance.
- The system is evaluated on various datasets, demonstrating its effectiveness in real-world autonomous driving scenarios.
Plain English Explanation
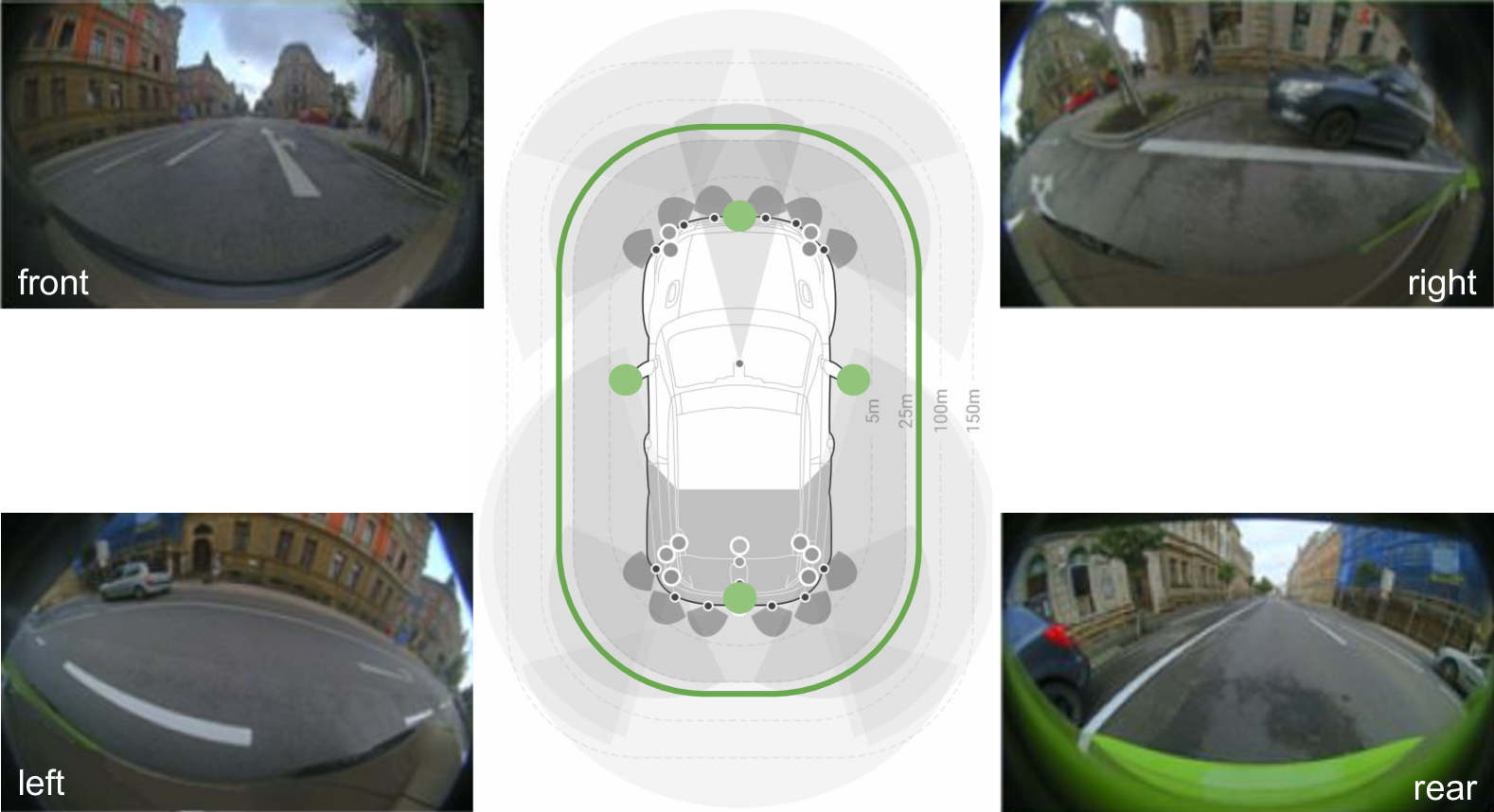
In the world of autonomous driving, having a clear understanding of the surrounding environment is crucial. FisheyeDetNet is a system designed to help with this challenge by using specialized cameras called "fisheye" cameras. These cameras have a wide field of view, allowing them to capture a panoramic image of the area around the vehicle.
However, the wide-angle lenses used in fisheye cameras can introduce significant distortion in the captured images, which can make it difficult to accurately detect and identify objects. The researchers behind FisheyeDetNet have developed a new approach to address this problem.
FisheyeDetNet uses a specialized neural network architecture that is designed to handle the unique properties of fisheye camera images. This includes modules that can "undo" the distortion caused by the fisheye lens, allowing the system to accurately detect and classify objects in the surrounding environment.
By using this approach, the researchers were able to demonstrate that FisheyeDetNet can achieve excellent performance in real-world autonomous driving scenarios, even in challenging conditions like low-light or cluttered environments. This technology could be a valuable tool for improving the safety and reliability of self-driving cars, as well as other autonomous systems that rely on a comprehensive understanding of their surroundings.
Technical Explanation
The paper introduces FisheyeDetNet, a novel object detection system designed for use with fisheye surround view camera systems in automated driving applications. Fisheye cameras offer a wide field of view, but their distorted images present unique challenges for object detection compared to standard perspective cameras.
To address this, the authors propose a specialized neural network architecture that includes several key components:
- A distortion-aware feature extractor that can handle the non-linear distortion introduced by the fisheye lens.
- A location-guided head pose estimation module that estimates the orientation of detected objects to improve classification.
- A label-efficient 3D object detection module that can accurately localize objects in the 3D space around the vehicle.
The FisheyeDetNet architecture is evaluated on several datasets, including a custom fisheye dataset collected for this study. The results demonstrate that the proposed system outperforms state-of-the-art object detectors on fisheye camera images, particularly in challenging scenarios such as low-light conditions or with occluded objects.
Critical Analysis
The FisheyeDetNet paper addresses an important practical challenge in autonomous driving – the use of fisheye surround view cameras, which offer a wide field of view but introduce significant distortion. The authors' approach of developing specialized neural network modules to handle this distortion is a well-reasoned and technically sound solution.
One potential limitation of the research is the reliance on a custom dataset for evaluation. While the authors provide details on the dataset collection process, it would be beneficial to see the system's performance evaluated on a more widely-used, standardized benchmark for autonomous driving perception tasks.
Additionally, the paper does not delve deeply into the computational and power requirements of the FisheyeDetNet architecture, which could be an important consideration for real-world deployment on low-power automotive hardware. Further analysis of the system's efficiency and potential trade-offs would help assess its practicality for commercial applications.
Overall, the FisheyeDetNet paper presents a promising approach to object detection for fisheye camera systems in autonomous driving. The specialized modules and end-to-end architecture demonstrate the value of tailoring computer vision techniques to the unique challenges posed by this sensor technology. Continued research in this direction could lead to significant advancements in the reliability and safety of self-driving cars.
Conclusion
The FisheyeDetNet paper introduces a novel object detection system designed for fisheye surround view camera systems in automated driving applications. By developing specialized neural network modules to handle the distortion inherent in fisheye images, the researchers have created a solution that can accurately detect and localize objects in the vehicle's surrounding environment.
This work is a valuable contribution to the field of autonomous driving, as it addresses a practical challenge that has hindered the adoption of wide-angle camera systems. The demonstrated performance improvements over standard object detectors, particularly in challenging scenarios, suggest that FisheyeDetNet could be a crucial component in enhancing the safety and reliability of self-driving cars.
As the development of autonomous driving technologies continues, the ability to effectively leverage diverse sensor modalities like fisheye cameras will be crucial. The FisheyeDetNet approach provides a compelling example of how tailoring computer vision techniques to specific sensor characteristics can unlock new capabilities and bring us closer to the realization of fully autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FisheyeDetNet: Object Detection on Fisheye Surround View Camera Systems for Automated Driving
Ganesh Sistu, Senthil Yogamani
Object detection is a mature problem in autonomous driving with pedestrian detection being one of the first deployed algorithms. It has been comprehensively studied in the literature. However, object detection is relatively less explored for fisheye cameras used for surround-view near field sensing. The standard bounding box representation fails in fisheye cameras due to heavy radial distortion, particularly in the periphery. To mitigate this, we explore extending the standard object detection output representation of bounding box. We design rotated bounding boxes, ellipse, generic polygon as polar arc/angle representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model FisheyeDetNet with polygon outperforms others and achieves a mAP score of 49.5 % on Valeo fisheye surround-view dataset for automated driving applications. This dataset has 60K images captured from 4 surround-view cameras across Europe, North America and Asia. To the best of our knowledge, this is the first detailed study on object detection on fisheye cameras for autonomous driving scenarios.
Read more4/30/2024
0
Low-Light Image Enhancement Framework for Improved Object Detection in Fisheye Lens Datasets
Dai Quoc Tran, Armstrong Aboah, Yuntae Jeon, Maged Shoman, Minsoo Park, Seunghee Park
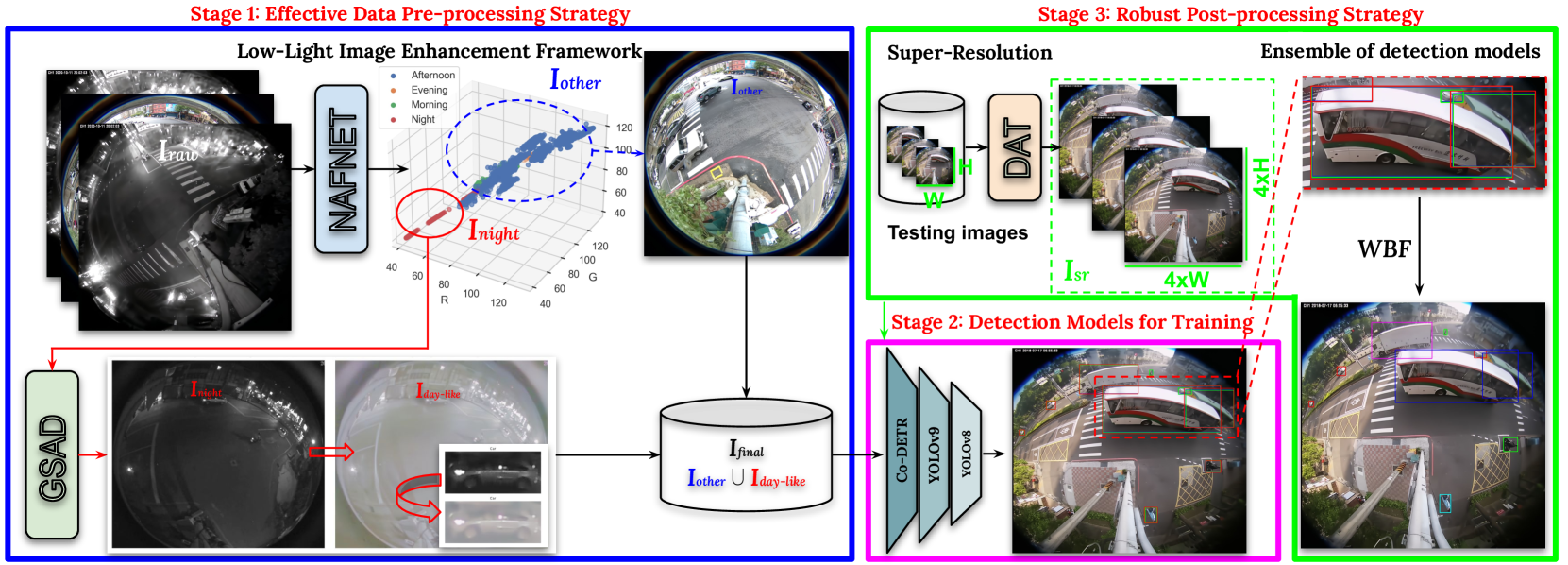
This study addresses the evolving challenges in urban traffic monitoring detection systems based on fisheye lens cameras by proposing a framework that improves the efficacy and accuracy of these systems. In the context of urban infrastructure and transportation management, advanced traffic monitoring systems have become critical for managing the complexities of urbanization and increasing vehicle density. Traditional monitoring methods, which rely on static cameras with narrow fields of view, are ineffective in dynamic urban environments, necessitating the installation of multiple cameras, which raises costs. Fisheye lenses, which were recently introduced, provide wide and omnidirectional coverage in a single frame, making them a transformative solution. However, issues such as distorted views and blurriness arise, preventing accurate object detection on these images. Motivated by these challenges, this study proposes a novel approach that combines a ransformer-based image enhancement framework and ensemble learning technique to address these challenges and improve traffic monitoring accuracy, making significant contributions to the future of intelligent traffic management systems. Our proposed methodological framework won 5th place in the 2024 AI City Challenge, Track 4, with an F1 score of 0.5965 on experimental validation data. The experimental results demonstrate the effectiveness, efficiency, and robustness of the proposed system. Our code is publicly available at https://github.com/daitranskku/AIC2024-TRACK4-TEAM15.
Read more4/17/2024

0
Deformable Convolution Based Road Scene Semantic Segmentation of Fisheye Images in Autonomous Driving
Anam Manzoor, Aryan Singh, Ganesh Sistu, Reenu Mohandas, Eoin Grua, Anthony Scanlan, Ciar'an Eising
This study investigates the effectiveness of modern Deformable Convolutional Neural Networks (DCNNs) for semantic segmentation tasks, particularly in autonomous driving scenarios with fisheye images. These images, providing a wide field of view, pose unique challenges for extracting spatial and geometric information due to dynamic changes in object attributes. Our experiments focus on segmenting the WoodScape fisheye image dataset into ten distinct classes, assessing the Deformable Networks' ability to capture intricate spatial relationships and improve segmentation accuracy. Additionally, we explore different loss functions to address class imbalance issues and compare the performance of conventional CNN architectures with Deformable Convolution-based CNNs, including Vanilla U-Net and Residual U-Net architectures. The significant improvement in mIoU score resulting from integrating Deformable CNNs demonstrates their effectiveness in handling the geometric distortions present in fisheye imagery, exceeding the performance of traditional CNN architectures. This underscores the significant role of Deformable convolution in enhancing semantic segmentation performance for fisheye imagery.
Read more7/24/2024

0
Enhanced Parking Perception by Multi-Task Fisheye Cross-view Transformers
Antonyo Musabini, Ivan Novikov, Sana Soula, Christel Leonet, Lihao Wang, Rachid Benmokhtar, Fabian Burger, Thomas Boulay, Xavier Perrotton
Current parking area perception algorithms primarily focus on detecting vacant slots within a limited range, relying on error-prone homographic projection for both labeling and inference. However, recent advancements in Advanced Driver Assistance System (ADAS) require interaction with end-users through comprehensive and intelligent Human-Machine Interfaces (HMIs). These interfaces should present a complete perception of the parking area going from distinguishing vacant slots' entry lines to the orientation of other parked vehicles. This paper introduces Multi-Task Fisheye Cross View Transformers (MT F-CVT), which leverages features from a four-camera fisheye Surround-view Camera System (SVCS) with multihead attentions to create a detailed Bird-Eye View (BEV) grid feature map. Features are processed by both a segmentation decoder and a Polygon-Yolo based object detection decoder for parking slots and vehicles. Trained on data labeled using LiDAR, MT F-CVT positions objects within a 25m x 25m real open-road scenes with an average error of only 20 cm. Our larger model achieves an F-1 score of 0.89. Moreover the smaller model operates at 16 fps on an Nvidia Jetson Orin embedded board, with similar detection results to the larger one. MT F-CVT demonstrates robust generalization capability across different vehicles and camera rig configurations. A demo video from an unseen vehicle and camera rig is available at: https://streamable.com/jjw54x.
Read more8/23/2024