Adapting Skills to Novel Grasps: A Self-Supervised Approach

0
Sign in to get full access
Overview
- This paper presents a self-supervised approach for adapting robot grasping skills to novel objects.
- The key idea is to learn a latent representation that captures the essential aspects of grasping, and then use this to generalize to new objects.
- The method is evaluated on a range of objects and tasks, showing improved performance compared to baseline approaches.
Plain English Explanation
The paper describes a new way for robots to learn how to grasp different objects. Typically, robots need to be trained on specific objects to learn how to pick them up. This new approach allows the robot to learn a more general understanding of grasping that can then be applied to new, unseen objects.
The core of the method is learning a latent representation that captures the key aspects of grasping an object. This latent representation acts as an abstract "understanding" of grasping that goes beyond any specific object. Once this latent representation is learned, the robot can use it to adapt its grasping skills to new objects it hasn't seen before.
The authors evaluate this approach on a variety of objects and tasks, and show that it outperforms more traditional methods that require separate training for each new object. This suggests the latent representation is effectively allowing the robot to "transfer" its grasping knowledge to novel scenarios.
Overall, this work demonstrates an important step towards more flexible and adaptable robot grasping capabilities, which could have significant applications in areas like assistive robotics, warehouse automation, and manufacturing.
Technical Explanation
The key technical contributions of this paper are:
-
Latent Representation Learning: The authors propose learning a low-dimensional latent representation that captures the essential aspects of grasping an object. This is done through a self-supervised training process where the robot observes its own successful grasps and learns to extract the underlying "grasping features" in an unsupervised way.
-
Adaptation to Novel Grasps: Once the latent representation is learned, the robot can use it to adapt its grasping skills to new objects. This is achieved by learning a mapping from the object's visual features to the latent grasping representation, allowing the robot to infer the appropriate grasping strategy for a novel object.
-
Evaluation: The authors evaluate their approach on a range of objects and tasks, including both simulated and real-world experiments. They show that the latent representation-based method outperforms baseline approaches that require object-specific training.
The technical details of the latent representation learning and adaptation process are described in Sections 3 and 4. The experiments and results are covered in Section 5.
Critical Analysis
The paper presents a promising approach, but there are a few potential limitations and areas for further research:
-
Reliance on Self-Supervision: The method relies on the robot's own experience of successful grasps to learn the latent representation. This could limit the approach's ability to learn from more diverse grasping experiences, such as those that might be available in a simulated or crowdsourced dataset.
-
Generalization Ability: While the results show improved performance on novel objects, the authors acknowledge that the generalization capabilities of the latent representation may still be limited. Further research could explore ways to enhance the representation's ability to capture the most general grasping features.
-
Real-World Deployment: The experiments included both simulated and physical robot evaluations, but the real-world deployment challenges (e.g., sensor noise, object variability) were not extensively discussed. Addressing these practical concerns would be an important step towards real-world applications.
Overall, this work presents an interesting self-supervised approach to adapt robot grasping skills, and the authors have done a good job of evaluating its performance. Further research to address the limitations mentioned could help advance the state of the art in flexible and adaptable robot manipulation.
Conclusion
This paper introduces a self-supervised approach for adapting robot grasping skills to novel objects. By learning a latent representation that captures the essential aspects of grasping, the robot can generalize its skills to new, unseen objects. The evaluation results demonstrate the potential of this method to improve the adaptability and flexibility of robot manipulation capabilities, which could have significant implications for a variety of applications, such as assistive robotics, warehouse automation, and manufacturing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adapting Skills to Novel Grasps: A Self-Supervised Approach
Georgios Papagiannis, Kamil Dreczkowski, Vitalis Vosylius, Edward Johns
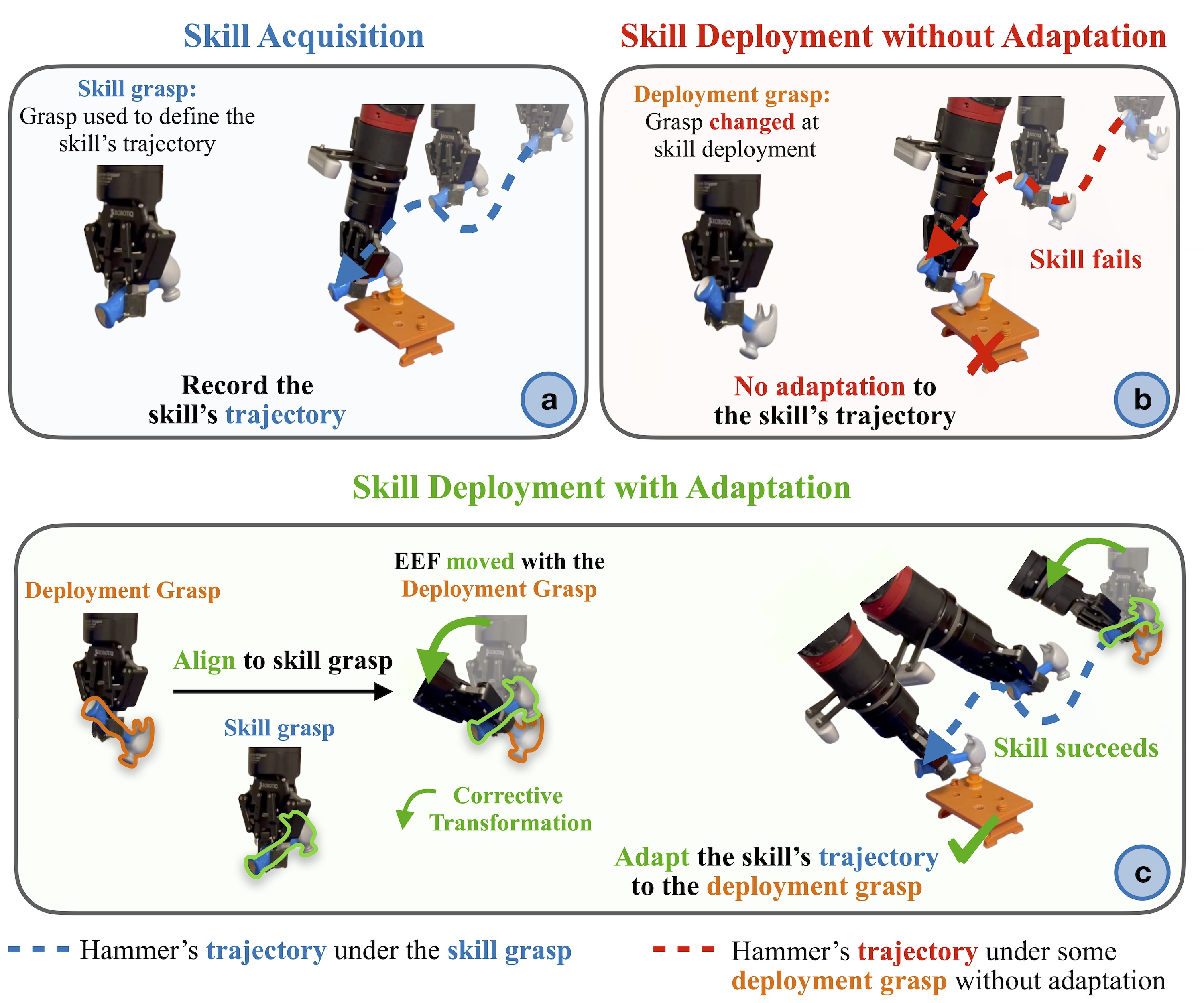
In this paper, we study the problem of adapting manipulation trajectories involving grasped objects (e.g. tools) defined for a single grasp pose to novel grasp poses. A common approach to address this is to define a new trajectory for each possible grasp explicitly, but this is highly inefficient. Instead, we propose a method to adapt such trajectories directly while only requiring a period of self-supervised data collection, during which a camera observes the robot's end-effector moving with the object rigidly grasped. Importantly, our method requires no prior knowledge of the grasped object (such as a 3D CAD model), it can work with RGB images, depth images, or both, and it requires no camera calibration. Through a series of real-world experiments involving 1360 evaluations, we find that self-supervised RGB data consistently outperforms alternatives that rely on depth images including several state-of-the-art pose estimation methods. Compared to the best-performing baseline, our method results in an average of 28.5% higher success rate when adapting manipulation trajectories to novel grasps on several everyday tasks. Videos of the experiments are available on our webpage at https://www.robot-learning.uk/adapting-skills
Read more8/2/2024
🤿
0
Unknown Object Grasping for Assistive Robotics
Elle Miller, Maximilian Durner, Matthias Humt, Gabriel Quere, Wout Boerdijk, Ashok M. Sundaram, Freek Stulp, Jorn Vogel
We propose a novel pipeline for unknown object grasping in shared robotic autonomy scenarios. State-of-the-art methods for fully autonomous scenarios are typically learning-based approaches optimised for a specific end-effector, that generate grasp poses directly from sensor input. In the domain of assistive robotics, we seek instead to utilise the user's cognitive abilities for enhanced satisfaction, grasping performance, and alignment with their high level task-specific goals. Given a pair of stereo images, we perform unknown object instance segmentation and generate a 3D reconstruction of the object of interest. In shared control, the user then guides the robot end-effector across a virtual hemisphere centered around the object to their desired approach direction. A physics-based grasp planner finds the most stable local grasp on the reconstruction, and finally the user is guided by shared control to this grasp. In experiments on the DLR EDAN platform, we report a grasp success rate of 87% for 10 unknown objects, and demonstrate the method's capability to grasp objects in structured clutter and from shelves.
Read more5/7/2024
🐍
0
Learning Extrinsic Dexterity with Parameterized Manipulation Primitives
Shih-Min Yang, Martin Magnusson, Johannes A. Stork, Todor Stoyanov
Many practically relevant robot grasping problems feature a target object for which all grasps are occluded, e.g., by the environment. Single-shot grasp planning invariably fails in such scenarios. Instead, it is necessary to first manipulate the object into a configuration that affords a grasp. We solve this problem by learning a sequence of actions that utilize the environment to change the object's pose. Concretely, we employ hierarchical reinforcement learning to combine a sequence of learned parameterized manipulation primitives. By learning the low-level manipulation policies, our approach can control the object's state through exploiting interactions between the object, the gripper, and the environment. Designing such a complex behavior analytically would be infeasible under uncontrolled conditions, as an analytic approach requires accurate physical modeling of the interaction and contact dynamics. In contrast, we learn a hierarchical policy model that operates directly on depth perception data, without the need for object detection, pose estimation, or manual design of controllers. We evaluate our approach on picking box-shaped objects of various weight, shape, and friction properties from a constrained table-top workspace. Our method transfers to a real robot and is able to successfully complete the object picking task in 98% of experimental trials. Supplementary information and videos can be found at https://shihminyang.github.io/ED-PMP/.
Read more5/10/2024
0
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
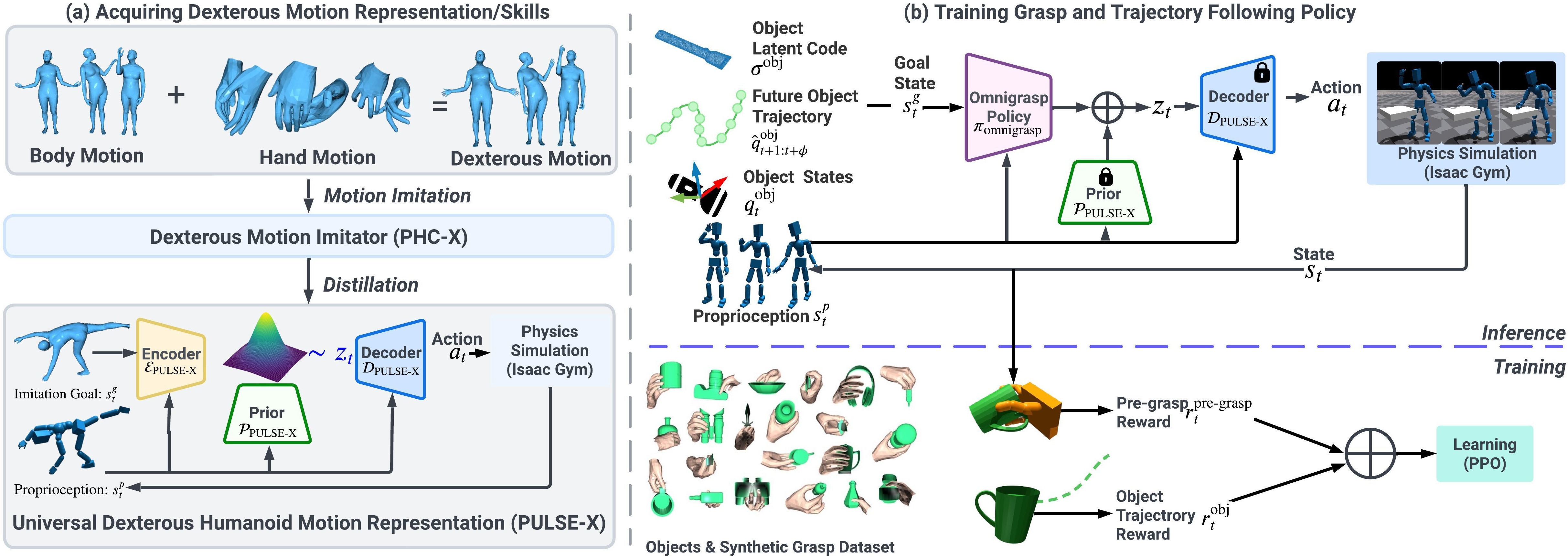
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024