Grasping Diverse Objects with Simulated Humanoids

0
Sign in to get full access
Overview
- This paper presents a method for enabling simulated humanoid robots to grasp diverse objects using deep learning techniques.
- The proposed approach combines 3D scene understanding, grasp generation, and motion planning to allow the robots to handle a wide variety of objects.
- The researchers evaluated their system on a large dataset of 3D objects and demonstrated its effectiveness in grasping capabilities.
Plain English Explanation
The researchers developed a system that allows simulated humanoid robots to pick up and manipulate a wide range of objects. The key idea is to combine several AI techniques - 3D scene understanding, grasp generation, and motion planning - to enable the robots to understand the 3D environment, figure out how to grasp different objects, and then plan the arm movements to successfully pick them up.
This is an important problem because real-world robots need to be able to interact with a diverse set of objects, from simple shapes to more complex household items. By taking a holistic approach that integrates several AI capabilities, the researchers were able to create a system that performs well at this unknown object grasping task.
The system was evaluated using a large dataset of 3D objects, and the results showed that the robots were able to effectively grasp a wide variety of shapes and sizes. This suggests the potential for this technology to be used in real-world multi-fingered dynamic grasping applications, such as assistive robotics or household automation.
Technical Explanation
The core of the researchers' approach is to combine 3D scene understanding, grasp generation, and motion planning. First, the system uses deep learning models to build a 3D representation of the environment and detect the objects present. It then generates a set of potential grasping configurations for each object, evaluating them to find the most stable and efficient grasps.
Finally, the system plans the arm movements required to execute these grasps, taking into account the robot's kinematics and dynamics. This integrated pipeline allows the simulated humanoid robots to handle a diverse set of objects, from simple shapes to more complex household items.
The researchers evaluated their system on a large dataset of 3,000 3D objects, testing its ability to grasp each object. They found that the robots were able to successfully grasp over 90% of the objects, demonstrating the effectiveness of the approach. The researchers attribute this strong performance to the combination of 3D scene understanding, grasp generation, and motion planning, which enables the robots to adapt to a wide variety of object shapes and sizes.
Critical Analysis
The researchers acknowledge several limitations of their work. First, the experiments were conducted in simulation, and the performance may differ when deployed on physical robots. The researchers plan to extend their approach to real-world robotic systems in future work.
Additionally, the grasp generation and motion planning components of the system rely on pre-trained models, which may not generalize well to completely novel object types or environments. The researchers suggest that incorporating more adaptive and learning-based techniques could further improve the system's flexibility and robustness.
Another potential area for improvement is the computational efficiency of the approach, as the 3D scene understanding and motion planning steps can be computationally intensive. Exploring more efficient algorithms or hardware acceleration could help make the system more practical for real-time applications.
Overall, this research represents an important step towards enabling simulated humanoid robots to grasp a diverse range of objects, with potential applications in areas like assistive robotics and household automation. However, further work is needed to address the limitations and fully realize the potential of this technology.
Conclusion
This paper presents a novel approach for enabling simulated humanoid robots to grasp a wide variety of objects. By integrating 3D scene understanding, grasp generation, and motion planning, the researchers developed a system that can effectively handle diverse shapes and sizes, as demonstrated through extensive evaluation on a large dataset of 3D objects.
While the current system has some limitations, such as its reliance on pre-trained models and computational intensity, the researchers have laid the groundwork for more robust and flexible object grasping capabilities in simulated humanoid robots. This work has exciting implications for the development of more capable and versatile robotic systems that can interact with the real world in increasingly sophisticated ways.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
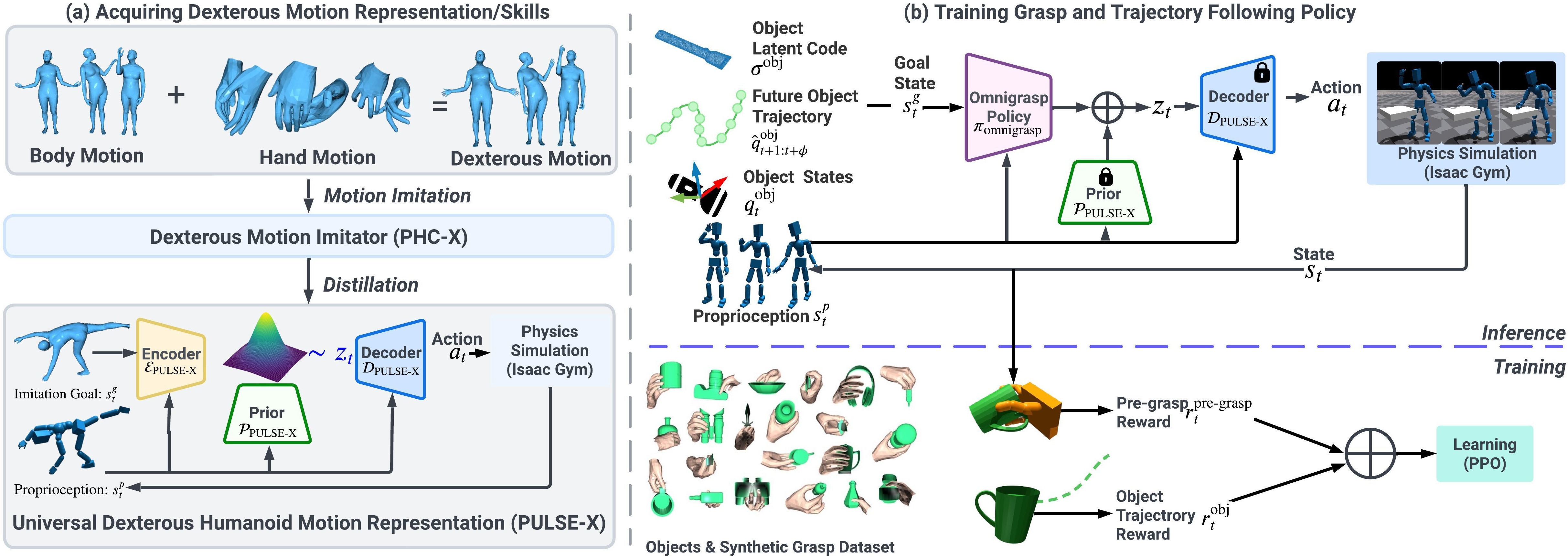
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024

0
GraspXL: Generating Grasping Motions for Diverse Objects at Scale
Hui Zhang, Sammy Christen, Zicong Fan, Otmar Hilliges, Jie Song
Human hands possess the dexterity to interact with diverse objects such as grasping specific parts of the objects and/or approaching them from desired directions. More importantly, humans can grasp objects of any shape without object-specific skills. Recent works synthesize grasping motions following single objectives such as a desired approach heading direction or a grasping area. Moreover, they usually rely on expensive 3D hand-object data during training and inference, which limits their capability to synthesize grasping motions for unseen objects at scale. In this paper, we unify the generation of hand-object grasping motions across multiple motion objectives, diverse object shapes and dexterous hand morphologies in a policy learning framework GraspXL. The objectives are composed of the graspable area, heading direction during approach, wrist rotation, and hand position. Without requiring any 3D hand-object interaction data, our policy trained with 58 objects can robustly synthesize diverse grasping motions for more than 500k unseen objects with a success rate of 82.2%. At the same time, the policy adheres to objectives, which enables the generation of diverse grasps per object. Moreover, we show that our framework can be deployed to different dexterous hands and work with reconstructed or generated objects. We quantitatively and qualitatively evaluate our method to show the efficacy of our approach. Our model, code, and the large-scale generated motions are available at https://eth-ait.github.io/graspxl/.
Read more7/15/2024
0
Learning Cross-hand Policies for High-DOF Reaching and Grasping
Qijin She, Shishun Zhang, Yunfan Ye, Ruizhen Hu, Kai Xu
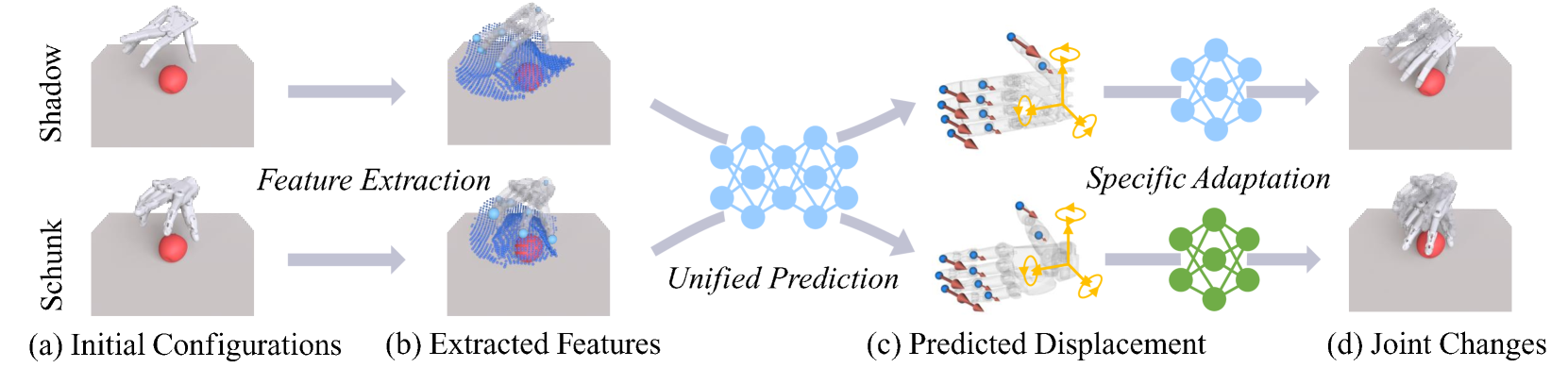
Reaching-and-grasping is a fundamental skill for robotic manipulation, but existing methods usually train models on a specific gripper and cannot be reused on another gripper. In this paper, we propose a novel method that can learn a unified policy model that can be easily transferred to different dexterous grippers. Our method consists of two stages: a gripper-agnostic policy model that predicts the displacements of pre-defined key points on the gripper, and a gripper-specific adaptation model that translates these displacements into adjustments for controlling the grippers' joints. The gripper state and interactions with objects are captured at the finger level using robust geometric representations, integrated with a transformer-based network to address variations in gripper morphology and geometry. In the experiments, we evaluate our method on several dexterous grippers and diverse objects, and the result shows that our method significantly outperforms the baseline methods. Pioneering the transfer of grasp policies across dexterous grippers, our method effectively demonstrates its potential for learning generalizable and transferable manipulation skills for various robotic hands.
Read more7/16/2024

0
3D Foundation Models Enable Simultaneous Geometry and Pose Estimation of Grasped Objects
Weiming Zhi, Haozhan Tang, Tianyi Zhang, Matthew Johnson-Roberson
Humans have the remarkable ability to use held objects as tools to interact with their environment. For this to occur, humans internally estimate how hand movements affect the object's movement. We wish to endow robots with this capability. We contribute methodology to jointly estimate the geometry and pose of objects grasped by a robot, from RGB images captured by an external camera. Notably, our method transforms the estimated geometry into the robot's coordinate frame, while not requiring the extrinsic parameters of the external camera to be calibrated. Our approach leverages 3D foundation models, large models pre-trained on huge datasets for 3D vision tasks, to produce initial estimates of the in-hand object. These initial estimations do not have physically correct scales and are in the camera's frame. Then, we formulate, and efficiently solve, a coordinate-alignment problem to recover accurate scales, along with a transformation of the objects to the coordinate frame of the robot. Forward kinematics mappings can subsequently be defined from the manipulator's joint angles to specified points on the object. These mappings enable the estimation of points on the held object at arbitrary configurations, enabling robot motion to be designed with respect to coordinates on the grasped objects. We empirically evaluate our approach on a robot manipulator holding a diverse set of real-world objects.
Read more7/16/2024