Adaptive-Frequency Model Learning and Predictive Control for Dynamic Maneuvers on Legged Robots

0

Sign in to get full access
Overview
- This paper proposes a method for adaptive-frequency model learning and predictive control to enable dynamic maneuvers on legged robots.
- The key ideas are:
- Adaptively learning a model of the robot's dynamics to capture changes over time.
- Using this model in a model predictive control framework to plan and execute dynamic motions.
- Demonstrating the approach on challenging maneuvers like dynamic jumping on a simulated quadruped robot.
Plain English Explanation
The researchers developed a new control system for legged robots that allows them to perform dynamic and acrobatic maneuvers, like jumping. Traditional control methods often struggle with these types of rapid, high-force movements.
The key innovation is an adaptive model that continuously learns and updates its understanding of the robot's dynamics as the task progresses. This allows the control system to adapt to changes in the robot's state or environment. The model is then used in a model predictive control framework, which means the controller plans a sequence of actions into the future to achieve the desired motion, rather than just reacting in the moment.
By combining the adaptive model with predictive control, the system can anticipate and respond to the complex dynamics involved in high-speed maneuvers. The researchers demonstrate their approach on a simulated quadruped robot performing dynamic jumps, showing it can execute these challenging movements effectively.
Technical Explanation
The paper presents an adaptive-frequency model learning and predictive control approach to enable dynamic maneuvers on legged robots. The key technical components are:
-
Adaptive Model Learning: The researchers develop a learning-based model that can continuously adapt to changes in the robot's dynamics over time. This allows the model to capture complex, nonlinear effects that arise during high-speed movements.
-
Model Predictive Control: The adaptive model is incorporated into a model predictive control (MPC) framework. MPC plans a sequence of control actions into the future to achieve the desired motion, rather than just reacting in the moment.
-
Evaluation on Simulated Quadruped: The proposed approach is demonstrated on a simulated quadruped robot performing dynamic jumping maneuvers. The results show the system can successfully execute these challenging movements.
Critical Analysis
The paper presents a promising approach for enabling dynamic maneuvers on legged robots, but it also has some limitations:
- The adaptive model and MPC framework are evaluated only in simulation, so it remains to be seen how well the approach would translate to real-world hardware.
- The specific details of the model learning and control algorithms are not fully explained, making it difficult to assess their complexity and potential scalability.
- The paper does not discuss potential safety or stability issues that could arise when executing high-speed, high-force motions on legged robots.
Further research is needed to address these concerns and fully validate the practical applicability of the proposed methods.
Conclusion
This paper introduces an innovative approach that combines adaptive model learning and model predictive control to enable dynamic maneuvers on legged robots. By continuously updating its understanding of the robot's changing dynamics, the system can plan and execute complex movements like jumping with a high degree of agility and control.
While the research is still in a simulation-based stage, the results demonstrate the potential of this approach to advance the capabilities of legged robots, potentially unlocking new applications in areas like disaster response, space exploration, and human-robot interaction. Further development and real-world testing will be crucial to realizing the full benefits of this innovative control strategy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive-Frequency Model Learning and Predictive Control for Dynamic Maneuvers on Legged Robots
Chuong Nguyen, Abdullah Altawaitan, Thai Duong, Nikolay Atanasov, Quan Nguyen
Achieving both target accuracy and robustness in dynamic maneuvers with long flight phases, such as high or long jumps, has been a significant challenge for legged robots. To address this challenge, we propose a novel learning-based control approach consisting of model learning and model predictive control (MPC) utilizing an adaptive frequency scheme. Compared to existing MPC techniques, we learn a model directly from experiments, accounting not only for leg dynamics but also for modeling errors and unknown dynamics mismatch in hardware and during contact. Additionally, learning the model with adaptive frequency allows us to cover the entire flight phase and final jumping target, enhancing the prediction accuracy of the jumping trajectory. Using the learned model, we also design an adaptive-frequency MPC to effectively leverage different jumping phases and track the target accurately. In hardware experiments with a Unitree A1 robot, we demonstrate that our approach outperforms baseline MPC using a nominal model, reducing the jumping distance error up to 8 times. We achieve jumping distance errors of less than 3 percent during continuous jumping on uneven terrain with randomly-placed perturbations of random heights (up to 4 cm or 27 percent of the robot's standing height). Our approach obtains distance errors of 1-2 cm on 34 single and continuous jumps with different jumping targets and model uncertainties.
Read more7/23/2024
0
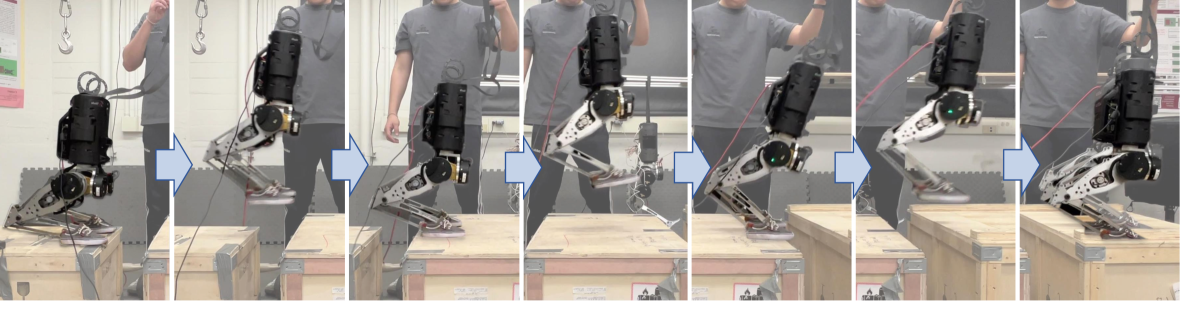
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
Junheng Li, Omar Kolt, Quan Nguyen
Dynamic and continuous jumping remains an open yet challenging problem in bipedal robot control. The choice of dynamic models in trajectory optimization (TO) problems plays a huge role in trajectory accuracy and computation efficiency, which normally cannot be ensured simultaneously. In this letter, we propose a novel adaptive-model optimization approach, a unified framework of Adaptive-model TO and Adaptive-frequency Model Predictive Control (MPC), to effectively realize continuous and robust jumping on HECTOR bipedal robot. The proposed Adaptive-model TO fuses adaptive-fidelity dynamics modeling of bipedal jumping motion for model fidelity necessities in different jumping phases to ensure trajectory accuracy and computation efficiency. In addition, conventional approaches have unsynchronized sampling frequencies in TO and real-time control, causing the framework to have mismatched modeling resolutions. We adapt MPC sampling frequency based on TO trajectory resolution in different phases for effective trajectory tracking. In hardware experiments, we have demonstrated robust and dynamic jumps covering a distance of up to 40 cm (57% of robot height). To verify the repeatability of this experiment, we run 53 jumping experiments and achieve 90% success rate. In continuous jumps, we demonstrate continuous bipedal jumping with terrain height perturbations (up to 5 cm) and discontinuities (up to 20 cm gap).
Read more4/19/2024

0
Accelerating Model Predictive Control for Legged Robots through Distributed Optimization
Lorenzo Amatucci, Giulio Turrisi, Angelo Bratta, Victor Barasuol, Claudio Semini
This paper presents a novel approach to enhance Model Predictive Control (MPC) for legged robots through Distributed Optimization. Our method focuses on decomposing the robot dynamics into smaller, parallelizable subsystems, and utilizing the Alternating Direction Method of Multipliers (ADMM) to ensure consensus among them. Each subsystem is managed by its own Optimal Control Problem, with ADMM facilitating consistency between their optimizations. This approach not only decreases the computational time but also allows for effective scaling with more complex robot configurations, facilitating the integration of additional subsystems such as articulated arms on a quadruped robot. We demonstrate, through numerical evaluations, the convergence of our approach on two systems with increasing complexity. In addition, we showcase that our approach converges towards the same solution when compared to a state-of-the-art centralized whole-body MPC implementation. Moreover, we quantitatively compare the computational efficiency of our method to the centralized approach, revealing up to a 75% reduction in computational time. Overall, our approach offers a promising avenue for accelerating MPC solutions for legged robots, paving the way for more effective utilization of the computational performance of modern hardware.
Read more9/5/2024

0
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Xuanqi Zeng, Hongbo Zhang, Linzhu Yue, Zhitao Song, Linwei Zhang, Yun-Hui Liu
Model Predictive Control (MPC) relies heavily on the robot model for its control law. However, a gap always exists between the reduced-order control model with uncertainties and the real robot, which degrades its performance. To address this issue, we propose the controller of integrating a data-driven error model into traditional MPC for quadruped robots. Our approach leverages real-world data from sensors to compensate for defects in the control model. Specifically, we employ the Autoregressive Moving Average Vector (ARMAV) model to construct the state error model of the quadruped robot using data. The predicted state errors are then used to adjust the predicted future robot states generated by MPC. By such an approach, our proposed controller can provide more accurate inputs to the system, enabling it to achieve desired states even in the presence of model parameter inaccuracies or disturbances. The proposed controller exhibits the capability to partially eliminate the disparity between the model and the real-world robot, thereby enhancing the locomotion performance of quadruped robots. We validate our proposed method through simulations and real-world experimental trials on a large-size quadruped robot that involves carrying a 20 kg un-modeled payload (84% of body weight).
Read more7/16/2024