Adaptive traffic signal safety and efficiency improvement by multi objective deep reinforcement learning approach

0
🤿
Sign in to get full access
Overview
- This research introduces a new method for adaptive traffic signal control (ATSC) using multi-objective deep reinforcement learning (DRL) techniques.
- The proposed approach aims to enhance traffic signal control strategies by addressing safety, efficiency, and decarbonization objectives simultaneously.
- Traditional ATSC methods often prioritize traffic efficiency and struggle to adapt to real-time dynamic traffic conditions.
- The study suggests a DRL-based ATSC algorithm that incorporates the Dueling Double Deep Q Network (D3QN) framework.
- The algorithm's performance is assessed using a simulated intersection in Changsha, China.
Plain English Explanation
The paper presents an innovative approach to managing traffic signals using deep reinforcement learning. Traditionally, traffic signal systems have focused on optimizing traffic flow and efficiency, but they often struggle to adapt to changing conditions in real-time.
This new method uses a more advanced machine learning technique called deep reinforcement learning to control the traffic signals. Instead of just trying to keep traffic moving as quickly as possible, the algorithm also considers safety and reducing carbon emissions from vehicles.
The researchers tested this new traffic signal control algorithm in a computer simulation of an intersection in Changsha, China. They found that it was able to reduce the number of potential collisions between vehicles by over 16% and decrease carbon emissions by 4%, compared to traditional traffic signal systems. While there was a slight increase in average waiting time for vehicles, the overall performance across all three objectives (efficiency, safety, and decarbonization) was better than previous methods.
The key innovation here is using advanced machine learning to balance multiple competing priorities for traffic management, rather than just focusing on efficiency. This could lead to safer, greener, and more responsive traffic signal systems in the real world.
Technical Explanation
The research proposes a deep reinforcement learning-based adaptive traffic signal control (ATSC) algorithm that incorporates the Dueling Double Deep Q Network (D3QN) framework. This allows the algorithm to optimize traffic signal control strategies while simultaneously considering safety, efficiency, and decarbonization objectives.
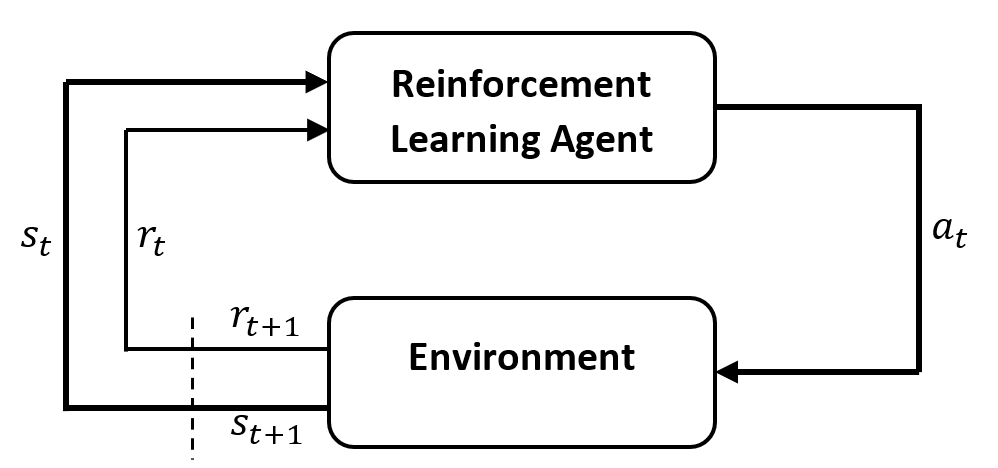
The D3QN architecture is used to train an agent that can learn the optimal actions to take (i.e., adjusting traffic signal timings) based on the current state of the intersection. The state is represented by factors like vehicle positions, speeds, and queues. The agent is rewarded for improving the overall performance across the three objectives.
The algorithm's performance is evaluated using a microscopic traffic simulation of an intersection in Changsha, China. Compared to traditional ATSC methods and DRL-based ATSC focused solely on efficiency, the proposed approach demonstrates:
- Over 16% reduction in potential traffic conflicts, indicating improved safety
- 4% decrease in carbon emissions, contributing to decarbonization
- 18% reduction in average vehicle waiting time, though a slight 0.64% increase compared to the DRL-based efficiency-only approach
The results suggest that the multi-objective DRL-based ATSC can effectively balance the trade-offs between the different goals, particularly in high-demand traffic scenarios.
Critical Analysis
The research presents a promising approach to traffic signal control by incorporating safety and environmental considerations alongside efficiency. However, there are a few potential limitations and areas for further study:
- The evaluation is based on a simulated intersection, so the performance in real-world conditions may differ. Further testing in actual urban environments would be valuable.
- The study does not address how the algorithm would handle unexpected events or incidents that disrupt normal traffic patterns. Robustness to these types of situations could be an area for future research.
- While the algorithm demonstrates improvements across multiple objectives, the specific weight or priority given to each objective is not discussed. Exploring different objective weighting schemes could provide insights into the trade-offs involved.
- Transitioning from the current traffic signal control systems to the proposed DRL-based approach may present implementation challenges that were not explored in this paper.
Overall, the research offers a compelling vision for a more holistic and adaptive traffic signal control system that can better address the complex and sometimes competing goals of modern transportation networks.
Conclusion
This research introduces an innovative deep reinforcement learning-based approach to adaptive traffic signal control (ATSC) that goes beyond traditional efficiency-focused methods. By incorporating safety, efficiency, and decarbonization objectives, the proposed algorithm demonstrates improved performance across these key metrics in a simulated environment.
The findings suggest that advanced machine learning techniques can enable traffic signal control systems to better adapt to dynamic real-world conditions and balance multiple competing priorities. This could lead to safer, greener, and more responsive traffic management in urban areas, contributing to the broader goals of sustainable and livable cities.
Further research and testing in real-world settings will be essential to validate the practical viability of this approach and address any implementation challenges. Nonetheless, this study represents an important step forward in enhancing traffic signal control through the innovative application of deep reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Adaptive traffic signal safety and efficiency improvement by multi objective deep reinforcement learning approach
Shahin Mirbakhsh, Mahdi Azizi
This research introduces an innovative method for adaptive traffic signal control (ATSC) through the utilization of multi-objective deep reinforcement learning (DRL) techniques. The proposed approach aims to enhance control strategies at intersections while simultaneously addressing safety, efficiency, and decarbonization objectives. Traditional ATSC methods typically prioritize traffic efficiency and often struggle to adapt to real-time dynamic traffic conditions. To address these challenges, the study suggests a DRL-based ATSC algorithm that incorporates the Dueling Double Deep Q Network (D3QN) framework. The performance of this algorithm is assessed using a simulated intersection in Changsha, China. Notably, the proposed ATSC algorithm surpasses both traditional ATSC and ATSC algorithms focused solely on efficiency optimization by achieving over a 16% reduction in traffic conflicts and a 4% decrease in carbon emissions. Regarding traffic efficiency, waiting time is reduced by 18% compared to traditional ATSC, albeit showing a slight increase (0.64%) compared to the DRL-based ATSC algorithm integrating the D3QN framework. This marginal increase suggests a trade-off between efficiency and other objectives like safety and decarbonization. Additionally, the proposed approach demonstrates superior performance, particularly in scenarios with high traffic demand, across all three objectives. These findings contribute to advancing traffic control systems by offering a practical and effective solution for optimizing signal control strategies in real-world traffic situations.
Read more8/6/2024
0
Adaptive Traffic Signal Control Using Reinforcement Learning
Muhammad Tahir Rafique, Ahmed Mustafa, Hasan Sajid
The growing demand for road use in urban areas has led to significant traffic congestion, posing challenges that are costly to mitigate through infrastructure expansion alone. As an alternative, optimizing existing traffic management systems, particularly through adaptive traffic signal control, offers a promising solution. This paper explores the use of Reinforcement Learning (RL) to enhance traffic signal operations at intersections, aiming to reduce congestion without extensive sensor networks. We introduce two RL-based algorithms: a turn-based agent, which dynamically prioritizes traffic signals based on real-time queue lengths, and a time-based agent, which adjusts signal phase durations according to traffic conditions while following a fixed phase cycle. By representing the state as a scalar queue length, our approach simplifies the learning process and lowers deployment costs. The algorithms were tested in four distinct traffic scenarios using seven evaluation metrics to comprehensively assess performance. Simulation results demonstrate that both RL algorithms significantly outperform conventional traffic signal control systems, highlighting their potential to improve urban traffic flow efficiently.
Read more9/4/2024
🤿
0
Exploring the impact of traffic signal control and connected and automated vehicles on intersections safety: A deep reinforcement learning approach
Amir Hossein Karbasi, Hao Yang, Saiedeh Razavi
In transportation networks, intersections pose significant risks of collisions due to conflicting movements of vehicles approaching from different directions. To address this issue, various tools can exert influence on traffic safety both directly and indirectly. This study focuses on investigating the impact of adaptive signal control and connected and automated vehicles (CAVs) on intersection safety using a deep reinforcement learning approach. The objective is to assess the individual and combined effects of CAVs and adaptive traffic signal control on traffic safety, considering rear-end and crossing conflicts. The study employs a Deep Q Network (DQN) to regulate traffic signals and driving behaviors of both CAVs and Human Drive Vehicles (HDVs), and uses Time To Collision (TTC) metric to evaluate safety. The findings demonstrate a significant reduction in rear-end and crossing conflicts through the combined implementation of CAVs and DQNs-based traffic signal control. Additionally, the long-term positive effects of CAVs on safety are similar to the short-term effects of combined CAVs and DQNs-based traffic signal control. Overall, the study emphasizes the potential benefits of integrating CAVs and adaptive traffic signal control approaches in order to enhance traffic safety. The findings of this study could provide valuable insights for city officials and transportation authorities in developing effective strategies to improve safety at signalized intersections.
Read more5/30/2024
🤿
0
Adaptive Transit Signal Priority based on Deep Reinforcement Learning and Connected Vehicles in a Traffic Microsimulation Environment
Dickness Kwesiga, Angshuman Guin, Michael Hunter
Model free reinforcement learning (RL) provides a potential alternative to earlier formulations of adaptive transit signal priority (TSP) algorithms based on mathematical programming that require complex and nonlinear objective functions. This study extends RL - based traffic control to include TSP. Using a microscopic simulation environment and connected vehicle data, the study develops and tests a TSP event-based RL agent that assumes control from another developed RL - based general traffic signal controller. The TSP agent assumes control when transit buses enter the dedicated short-range communication (DSRC) zone of the intersection. This agent is shown to reduce the bus travel time by about 21%, with marginal impacts to general traffic at a saturation rate of 0.95. The TSP agent also shows slightly better bus travel time compared to actuated signal control with TSP. The architecture of the agent and simulation is selected considering the need to improve simulation run time efficiency.
Read more8/2/2024