Adaptive Transit Signal Priority based on Deep Reinforcement Learning and Connected Vehicles in a Traffic Microsimulation Environment

0
🤿
Sign in to get full access
Overview
- This study explores the use of model-free reinforcement learning (RL) as an alternative to traditional mathematical programming-based approaches for adaptive transit signal priority (TSP) algorithms.
- The research develops and tests a TSP event-based RL agent that takes control from a previously developed RL-based general traffic signal controller when transit buses enter a dedicated short-range communication (DSRC) zone.
- The study is conducted in a microscopic simulation environment using connected vehicle data.
Plain English Explanation
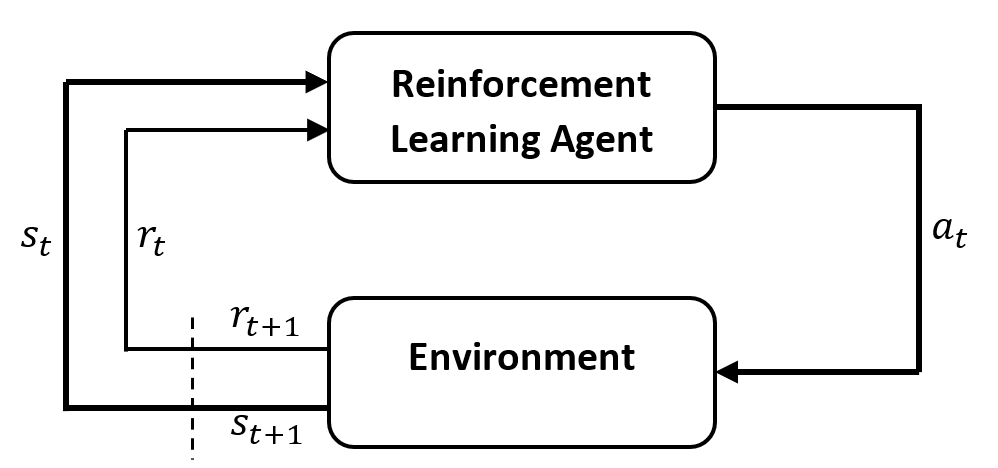
Model-free reinforcement learning (RL) is a technique that allows software agents to learn optimal behaviors through trial and error, without relying on complex mathematical models. This study explores using RL as an alternative to traditional traffic signal control algorithms that require complicated, nonlinear objective functions.
The researchers developed a special RL agent that focuses on providing transit signal priority (TSP) at intersections. This agent takes control of the traffic signals when it detects that a transit bus has entered a designated communication zone around the intersection. The goal is to adjust the signal timing to reduce the bus's travel time through the intersection, while minimizing the impact on regular traffic.
The researchers tested this TSP RL agent in a detailed computer simulation environment that used connected vehicle data to mimic real-world traffic conditions. They found that the TSP RL agent was able to reduce bus travel times by about 21% compared to a general RL-based traffic signal controller, with only minor impacts on regular traffic even in heavily congested conditions.
The TSP RL agent also performed slightly better than a traditional "actuated" traffic signal control system that incorporates TSP features. The researchers designed the simulation architecture to run efficiently, which is important for real-world deployment of such RL-based traffic control systems.
Technical Explanation
This study extends prior research on model-free reinforcement learning (RL) for traffic signal control to include dedicated support for transit signal priority (TSP). Using a microscopic traffic simulation environment and connected vehicle data, the researchers developed a TSP event-based RL agent that takes control of the intersection signals when transit buses enter a dedicated short-range communication (DSRC) zone.
The TSP RL agent is designed to optimize for reduced bus travel time through the intersection, while minimizing negative impacts on general traffic flow. It assumes control from a previously developed RL-based general traffic signal controller when triggered by the presence of a bus.
Through simulation experiments at a saturation rate of 0.95, the TSP RL agent was able to reduce bus travel time by approximately 21% compared to the general RL controller. It also showed slightly better performance than an actuated signal control system with TSP functionality.
The researchers paid close attention to the simulation architecture to improve computational efficiency, as RL-based traffic control systems require many trial-and-error iterations during the learning process. This focus on runtime performance is important for real-world deployment of such adaptive signal control approaches.
Critical Analysis
The study provides a promising proof-of-concept for using model-free RL techniques to implement adaptive TSP at intersections. The simulation results suggest that this approach can deliver meaningful travel time savings for transit vehicles without unduly impacting general traffic, even in congested conditions.
However, the paper does not address several important practical considerations for real-world deployment. For example, it does not discuss how the RL agent would be trained and calibrated using actual field data, nor how it would handle uncertainties and variations in traffic patterns and bus schedules.
Additionally, the simulation experiments were limited to a single intersection scenario. More research is needed to understand how the TSP RL agent would scale and perform in larger, more complex road networks with multiple intersections and transit routes.
Finally, the study does not compare the TSP RL agent's performance to other advanced traffic control strategies, such as those that leverage connected and automated vehicle (CAV) technology. Exploring these comparisons could provide further insights into the strengths and limitations of the RL-based approach.
Conclusion
This research demonstrates the potential of using model-free reinforcement learning techniques to implement adaptive transit signal priority at intersections. The TSP RL agent developed in this study was able to deliver meaningful travel time savings for buses while having only marginal impacts on general traffic flow, even in congested conditions.
However, further research is needed to address practical deployment challenges and to benchmark the RL-based approach against other advanced traffic control strategies. Successful implementation of such adaptive, data-driven traffic control systems could lead to significant improvements in the efficiency and reliability of public transportation networks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Adaptive Transit Signal Priority based on Deep Reinforcement Learning and Connected Vehicles in a Traffic Microsimulation Environment
Dickness Kwesiga, Angshuman Guin, Michael Hunter
Model free reinforcement learning (RL) provides a potential alternative to earlier formulations of adaptive transit signal priority (TSP) algorithms based on mathematical programming that require complex and nonlinear objective functions. This study extends RL - based traffic control to include TSP. Using a microscopic simulation environment and connected vehicle data, the study develops and tests a TSP event-based RL agent that assumes control from another developed RL - based general traffic signal controller. The TSP agent assumes control when transit buses enter the dedicated short-range communication (DSRC) zone of the intersection. This agent is shown to reduce the bus travel time by about 21%, with marginal impacts to general traffic at a saturation rate of 0.95. The TSP agent also shows slightly better bus travel time compared to actuated signal control with TSP. The architecture of the agent and simulation is selected considering the need to improve simulation run time efficiency.
Read more8/2/2024
0
Adaptive Traffic Signal Control Using Reinforcement Learning
Muhammad Tahir Rafique, Ahmed Mustafa, Hasan Sajid
The growing demand for road use in urban areas has led to significant traffic congestion, posing challenges that are costly to mitigate through infrastructure expansion alone. As an alternative, optimizing existing traffic management systems, particularly through adaptive traffic signal control, offers a promising solution. This paper explores the use of Reinforcement Learning (RL) to enhance traffic signal operations at intersections, aiming to reduce congestion without extensive sensor networks. We introduce two RL-based algorithms: a turn-based agent, which dynamically prioritizes traffic signals based on real-time queue lengths, and a time-based agent, which adjusts signal phase durations according to traffic conditions while following a fixed phase cycle. By representing the state as a scalar queue length, our approach simplifies the learning process and lowers deployment costs. The algorithms were tested in four distinct traffic scenarios using seven evaluation metrics to comprehensively assess performance. Simulation results demonstrate that both RL algorithms significantly outperform conventional traffic signal control systems, highlighting their potential to improve urban traffic flow efficiently.
Read more9/4/2024
🤿
0
Adaptive traffic signal safety and efficiency improvement by multi objective deep reinforcement learning approach
Shahin Mirbakhsh, Mahdi Azizi
This research introduces an innovative method for adaptive traffic signal control (ATSC) through the utilization of multi-objective deep reinforcement learning (DRL) techniques. The proposed approach aims to enhance control strategies at intersections while simultaneously addressing safety, efficiency, and decarbonization objectives. Traditional ATSC methods typically prioritize traffic efficiency and often struggle to adapt to real-time dynamic traffic conditions. To address these challenges, the study suggests a DRL-based ATSC algorithm that incorporates the Dueling Double Deep Q Network (D3QN) framework. The performance of this algorithm is assessed using a simulated intersection in Changsha, China. Notably, the proposed ATSC algorithm surpasses both traditional ATSC and ATSC algorithms focused solely on efficiency optimization by achieving over a 16% reduction in traffic conflicts and a 4% decrease in carbon emissions. Regarding traffic efficiency, waiting time is reduced by 18% compared to traditional ATSC, albeit showing a slight increase (0.64%) compared to the DRL-based ATSC algorithm integrating the D3QN framework. This marginal increase suggests a trade-off between efficiency and other objectives like safety and decarbonization. Additionally, the proposed approach demonstrates superior performance, particularly in scenarios with high traffic demand, across all three objectives. These findings contribute to advancing traffic control systems by offering a practical and effective solution for optimizing signal control strategies in real-world traffic situations.
Read more8/6/2024

0
iLLM-TSC: Integration reinforcement learning and large language model for traffic signal control policy improvement
Aoyu Pang, Maonan Wang, Man-On Pun, Chung Shue Chen, Xi Xiong
Urban congestion remains a critical challenge, with traffic signal control (TSC) emerging as a potent solution. TSC is often modeled as a Markov Decision Process problem and then solved using reinforcement learning (RL), which has proven effective. However, the existing RL-based TSC system often overlooks imperfect observations caused by degraded communication, such as packet loss, delays, and noise, as well as rare real-life events not included in the reward function, such as unconsidered emergency vehicles. To address these limitations, we introduce a novel integration framework that combines a large language model (LLM) with RL. This framework is designed to manage overlooked elements in the reward function and gaps in state information, thereby enhancing the policies of RL agents. In our approach, RL initially makes decisions based on observed data. Subsequently, LLMs evaluate these decisions to verify their reasonableness. If a decision is found to be unreasonable, it is adjusted accordingly. Additionally, this integration approach can be seamlessly integrated with existing RL-based TSC systems without necessitating modifications. Extensive testing confirms that our approach reduces the average waiting time by $17.5%$ in degraded communication conditions as compared to traditional RL methods, underscoring its potential to advance practical RL applications in intelligent transportation systems. The related code can be found at url{https://github.com/Traffic-Alpha/iLLM-TSC}.
Read more7/9/2024