Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors

0
🛸
Sign in to get full access
Overview
- The paper presents a method for generating adversarial safety-critical scenarios for testing autonomous vehicle (AV) systems using naturalistic human driving priors.
- The goal is to create challenging scenarios that can help identify weaknesses in AV control algorithms and improve their safety.
- The approach involves learning a generative model from real-world driving data and then using it to produce adversarial scenarios that push the AV system to its limits.
Plain English Explanation
The paper describes a way to create difficult driving situations that can be used to test the safety of self-driving car systems. [internal link: Autonomous vehicles] The researchers developed a computer model that can learn patterns from real-world driving data, such as how humans typically behave on the road. They then use this model to generate new, challenging driving scenarios that are designed to push the limits of the self-driving car's capabilities.
The goal is to identify potential weaknesses in the self-driving car's control algorithms before they are deployed in the real world. By testing the car in these adversarial, safety-critical scenarios, the researchers hope to make the technology more robust and reliable. [internal link: safety-critical] This is important because self-driving cars need to be able to handle a wide range of unexpected situations in order to ensure the safety of passengers and other road users.
Overall, the work aims to improve the safety and performance of autonomous vehicle systems by generating customized driving scenarios that can reveal their vulnerabilities and help developers address them.
Technical Explanation
The paper proposes a framework for generating [internal link: adversarial] safety-critical scenarios for testing autonomous vehicle (AV) systems. The key components are:
-
Naturalistic Driving Data Collection: The researchers collect a dataset of real-world human driving behavior from dashcam footage and vehicle sensors.
-
Generative Model Training: They train a generative adversarial network (GAN) model on the naturalistic driving data to learn the underlying distribution of human driving patterns.
-
Scenario Generation: The trained GAN model is then used to generate new, adversarial driving scenarios that push the AV system to its limits. This involves identifying safety-critical regions in the state space and using the GAN to produce challenging situations that the AV must navigate.
-
AV System Testing: The generated scenarios are used to test the performance and safety of the AV control algorithms, allowing developers to identify weaknesses and improve the system.
The core insight is that by leveraging real-world human driving data, the generated scenarios will be more naturalistic and challenging compared to manually designed test cases. This helps ensure the AV system is thoroughly tested before deployment in the real world.
Critical Analysis
The paper presents a novel and promising approach for improving the safety of autonomous vehicle systems. However, there are a few potential limitations and areas for further research:
-
Generalization to Unseen Scenarios: While the GAN-based scenario generation can produce diverse and challenging situations, it may still be limited to the types of scenarios observed in the training data. Exploring ways to extrapolate beyond the naturalistic data distribution could lead to even more rigorous testing.
-
Validation and Real-world Deployment: The paper focuses on the simulation-based testing of AV systems. More research is needed to validate the effectiveness of this approach and understand how it translates to real-world autonomous driving performance. [internal link: simulation-to-reality]
-
Ethical Considerations: The generation of adversarial scenarios raises ethical questions about the potential misuse of such technology. Careful consideration of the intended use case and appropriate safeguards is important.
Overall, the work represents an important step towards developing more robust and reliable autonomous vehicle systems. Continued research in this direction, with attention to the above considerations, could lead to significant advancements in AV safety and performance.
Conclusion
The paper presents a novel framework for generating adversarial, safety-critical scenarios to test the robustness of autonomous vehicle control algorithms. By leveraging naturalistic human driving data, the approach can produce diverse and challenging situations that push the limits of AV systems.
This work has the potential to significantly improve the safety and reliability of [internal link: autonomous vehicles] before they are deployed in the real world. The ability to rigorously test AV systems in simulation can help identify weaknesses and guide the development of more robust control algorithms.
While there are some limitations and ethical considerations to address, the overall approach represents an important contribution to the field of autonomous vehicle research and development. Continued advancements in this area could lead to self-driving cars that are better equipped to handle a wide range of unexpected situations and ensure the safety of all road users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
0
Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors
Kunkun Hao, Yonggang Luo, Wen Cui, Yuqiao Bai, Jucheng Yang, Songyang Yan, Yuxi Pan, Zijiang Yang
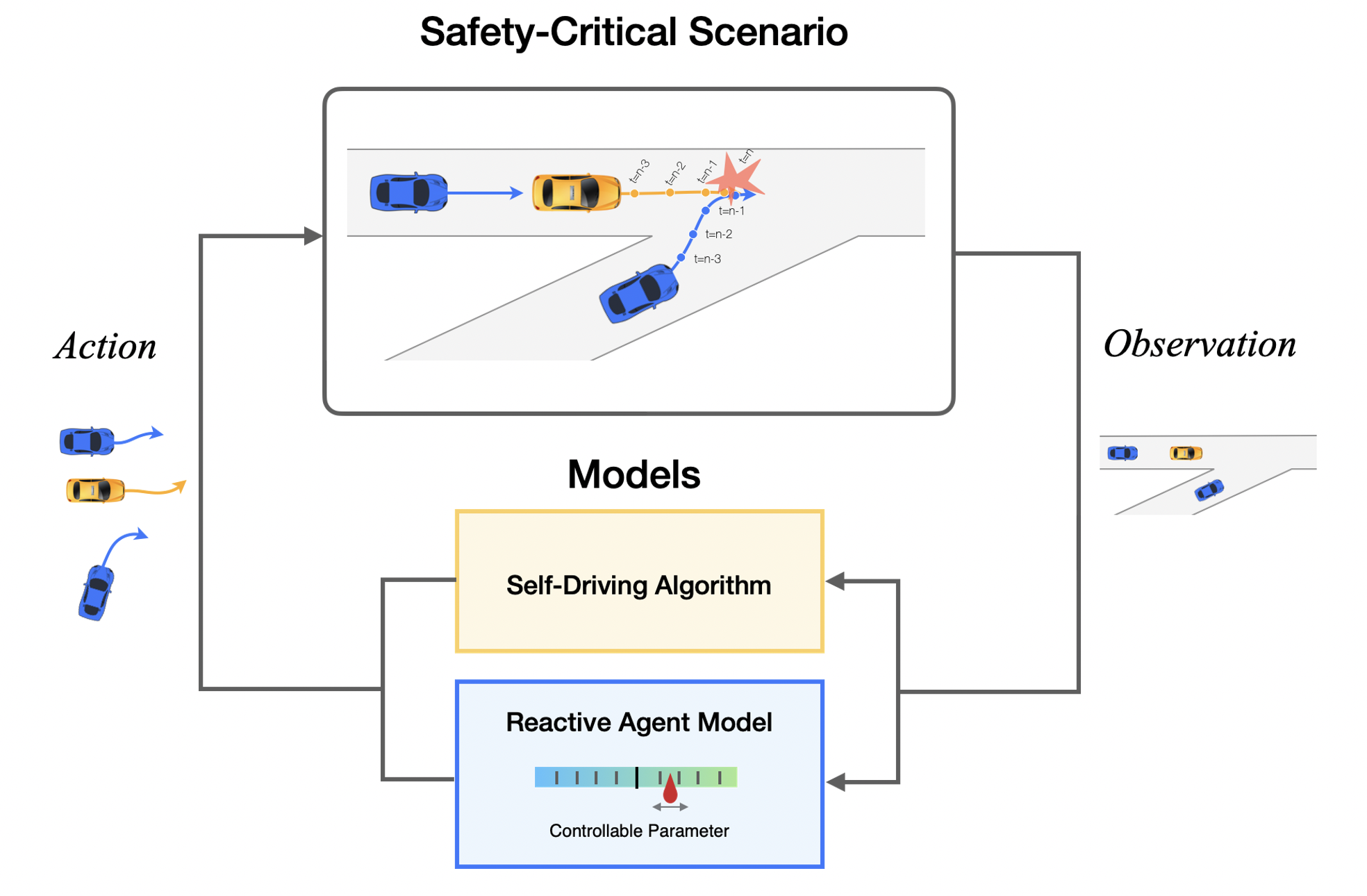
Evaluating the decision-making system is indispensable in developing autonomous vehicles, while realistic and challenging safety-critical test scenarios play a crucial role. Obtaining these scenarios is non-trivial, thanks to the long-tailed distribution, sparsity, and rarity in real-world data sets. To tackle this problem, in this paper, we introduce a natural adversarial scenario generation solution using naturalistic human driving priors and reinforcement learning techniques. By doing this, we can obtain large-scale test scenarios that are both diverse and realistic. Specifically, we build a simulation environment that mimics natural traffic interaction scenarios. Informed by this environment, we implement a two-stage procedure. The first stage incorporates conventional rule-based models, e.g., IDM~(Intelligent Driver Model) and MOBIL~(Minimizing Overall Braking Induced by Lane changes) model, to coarsely and discretely capture and calibrate key control parameters from the real-world dataset. Next, we leverage GAIL~(Generative Adversarial Imitation Learning) to represent driver behaviors continuously. The derived GAIL can be further used to design a PPO~(Proximal Policy Optimization)-based actor-critic network framework to fine-tune the reward function, and then optimizes our natural adversarial scenario generation solution. Extensive experiments have been conducted in the NGSIM dataset including the trajectory of 3,000 vehicles. Essential traffic parameters were measured in comparison with the baseline model, e.g., the collision rate, accelerations, steering, and the number of lane changes. Our findings demonstrate that the proposed model can generate realistic safety-critical test scenarios covering both naturalness and adversariality, which can be a cornerstone for the development of autonomous vehicles.
Read more8/9/2024
0
SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Controllable Adversaries
Wei-Jer Chang, Francesco Pittaluga, Masayoshi Tomizuka, Wei Zhan, Manmohan Chandraker
Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail safety-critical traffic scenarios. However, traditional methods for generating such scenarios often fall short in terms of controllability and realism; they also neglect the dynamics of agent interactions. To address these limitations, we introduce SAFE-SIM, a novel diffusion-based controllable closed-loop safety-critical simulation framework. Our approach yields two distinct advantages: 1) generating realistic long-tail safety-critical scenarios that closely reflect real-world conditions, and 2) providing controllable adversarial behavior for more comprehensive and interactive evaluations. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process of diffusion models, which allows an adversarial agent to challenge a planner with plausible maneuvers while all agents in the scene exhibit reactive and realistic behaviors. Furthermore, we propose novel guidance objectives and a partial diffusion process that enables users to control key aspects of the scenarios, such as the collision type and aggressiveness of the adversarial agent, while maintaining the realism of the behavior. We validate our framework empirically using the nuScenes and nuPlan datasets across multiple planners, demonstrating improvements in both realism and controllability. These findings affirm that diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader autonomous driving landscape. Project website: https://safe-sim.github.io/.
Read more8/9/2024

0
ReGentS: Real-World Safety-Critical Driving Scenario Generation Made Stable
Yuan Yin, Pegah Khayatan, 'Eloi Zablocki, Alexandre Boulch, Matthieu Cord
Machine learning based autonomous driving systems often face challenges with safety-critical scenarios that are rare in real-world data, hindering their large-scale deployment. While increasing real-world training data coverage could address this issue, it is costly and dangerous. This work explores generating safety-critical driving scenarios by modifying complex real-world regular scenarios through trajectory optimization. We propose ReGentS, which stabilizes generated trajectories and introduces heuristics to avoid obvious collisions and optimization problems. Our approach addresses unrealistic diverging trajectories and unavoidable collision scenarios that are not useful for training robust planner. We also extend the scenario generation framework to handle real-world data with up to 32 agents. Additionally, by using a differentiable simulator, our approach simplifies gradient descent-based optimization involving a simulator, paving the way for future advancements. The code is available at https://github.com/valeoai/ReGentS.
Read more9/14/2024

0
Quantitative Representation of Scenario Difficulty for Autonomous Driving Based on Adversarial Policy Search
Shuo Yang, Caojun Wang, Yuanjian Zhang, Yuming Yin, Yanjun Huang, Shengbo Eben Li, Hong Chen
Adversarial scenario generation is crucial for autonomous driving testing because it can efficiently simulate various challenge and complex traffic conditions. However, it is difficult to control current existing methods to generate desired scenarios, such as the ones with different conflict levels. Therefore, this paper proposes a data-driven quantitative method to represent scenario difficulty. Compared with rule-based discrete scenario difficulty representation method, the proposed algorithm can achieve continuous difficulty representation. Specifically, the environment agent is introduced, and a reinforcement learning method combined with mechanism knowledge is constructed for policy search to obtain an agent with adversarial behavior. The model parameters of the environment agent at different stages in the training process are extracted to construct a policy group, and then the agents with different adversarial intensity are obtained, which are used to realize data generation in different difficulty scenarios through the simulation environment. Finally, a data-driven scenario difficulty quantitative representation model is constructed, which is used to output the environment agent policy under different difficulties. The result analysis shows that the proposed algorithm can generate reasonable and interpretable scenarios with high discrimination, and can provide quantifiable difficulty representation without any expert logic rule design. The video link is https://www.youtube.com/watch?v=GceGdqAm9Ys.
Read more8/27/2024