SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Controllable Adversaries
2401.00391
0
1
Abstract
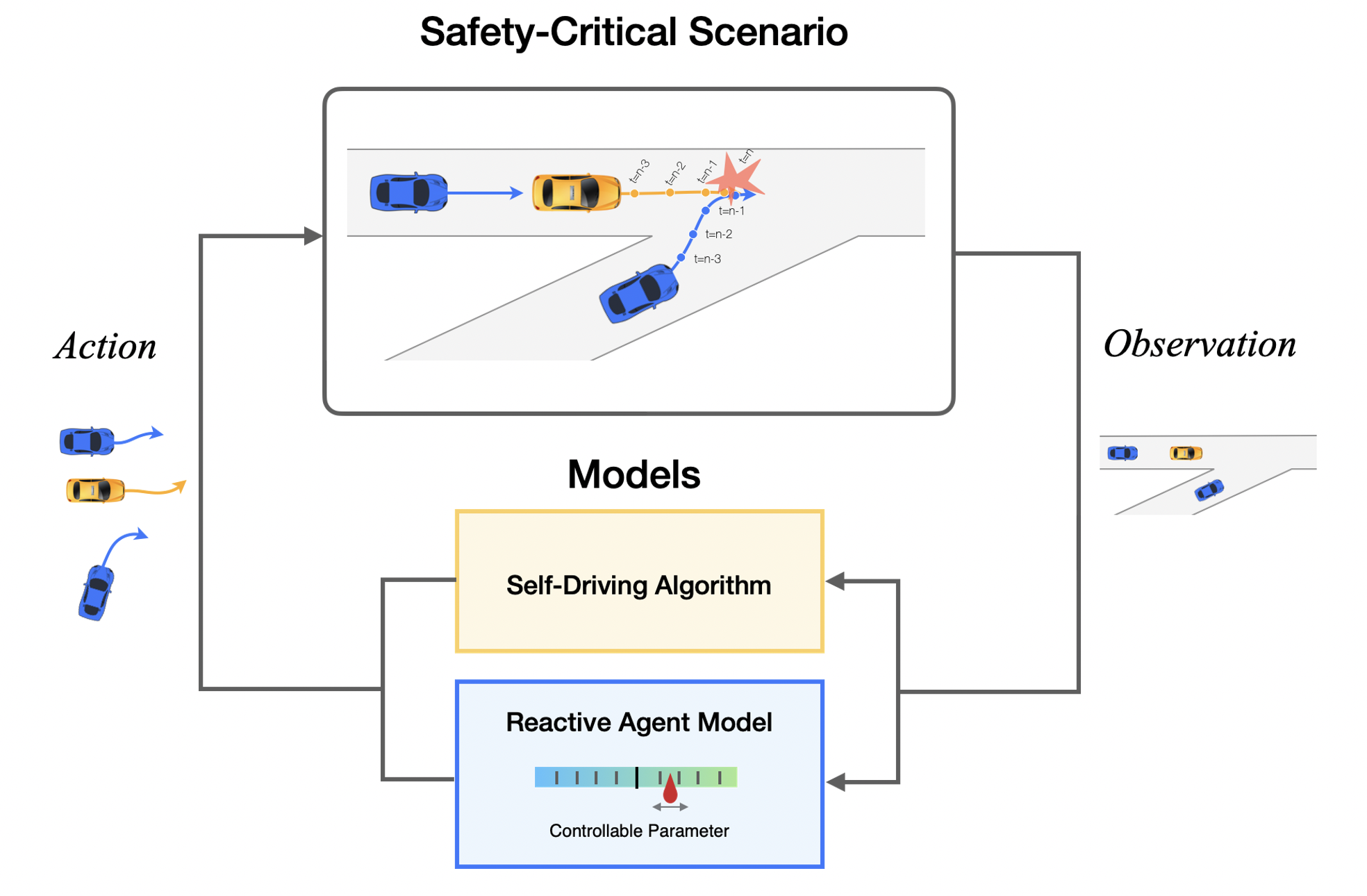
Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail safety-critical traffic scenarios. However, traditional methods for generating such scenarios often fall short in terms of controllability and realism and neglect the dynamics of agent interactions. To mitigate these limitations, we introduce SAFE-SIM, a novel diffusion-based controllable closed-loop safety-critical simulation framework. Our approach yields two distinct advantages: 1) the generation of realistic long-tail safety-critical scenarios that closely emulate real-world conditions, and 2) enhanced controllability, enabling more comprehensive and interactive evaluations. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process, which allows an adversarial agent to challenge a planner with plausible maneuvers while all agents in the scene exhibit reactive and realistic behaviors. Furthermore, we propose novel guidance objectives and a partial diffusion process that enables a user to control key aspects of the generated scenarios, such as the collision type and aggressiveness of the adversarial driver, while maintaining the realism of the behavior. We validate our framework empirically using the NuScenes dataset, demonstrating improvements in both realism and controllability. These findings affirm that diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader landscape of autonomous driving. For supplementary videos, visit our project at https://safe-sim.github.io/.
Create account to get full access
Overview
- Presents a novel closed-loop traffic simulation approach that enables precise control over safety-critical traffic scenarios
- Uses a guided diffusion model to generate traffic scenarios that meet specific safety constraints
- Demonstrates the ability to reliably reproduce dangerous traffic situations for testing and validating autonomous vehicle systems
Plain English Explanation
This research paper introduces a new way to simulate traffic scenarios for testing self-driving car systems. The key idea is to use a guided diffusion model to generate traffic situations that meet specific safety criteria, like how close vehicles get to each other.
This is important because it allows researchers to reliably recreate dangerous traffic scenarios, like cars veering into each other's lanes. They can then use these simulated scenarios to thoroughly test and validate self-driving car algorithms in a safe, controlled environment before deployment.
The approach gives researchers fine-grained control over the safety parameters of the simulated traffic, enabling them to explore the limits of autonomous vehicle capabilities and ensure they can handle even the most challenging situations. This helps improve the safety and reliability of self-driving car systems prior to real-world testing and deployment.
Technical Explanation
The paper presents a closed-loop traffic simulation framework that uses a guided diffusion model to generate traffic scenarios that meet specified safety constraints. The key components are:
-
Scenario Generation: The researchers employ a diffusion-based generative model to sample diverse traffic scenarios. This allows them to explore a wide range of possible traffic situations.
-
Safety Constraint Guidance: They guide the diffusion process to ensure the generated scenarios satisfy critical safety criteria, such as minimum vehicle separation distances. This enables precise control over the safety properties of the simulated traffic.
-
Closed-Loop Simulation: The generated scenarios are fed into a high-fidelity traffic simulation engine, which models the dynamic interaction between vehicles and the environment. This closed-loop simulation allows for realistic evaluation of autonomous driving systems.
The authors demonstrate the effectiveness of their approach through several experiments, showing that they can reliably reproduce dangerous traffic situations while maintaining fine-grained control over the safety parameters. This provides a powerful tool for testing and validating autonomous vehicle systems in a safe, repeatable manner.
Critical Analysis
The paper presents a novel and promising approach to generating safety-critical traffic scenarios for testing self-driving car systems. By using a guided diffusion model, the researchers are able to precisely control the safety properties of the simulated traffic, which is a significant advancement over traditional traffic simulation methods.
One potential limitation is the reliance on a high-fidelity traffic simulation engine, which can be computationally expensive and may not capture all the nuances of real-world driving behavior. Additionally, the paper does not provide a thorough analysis of the limitations of the guided diffusion model or the potential biases it may introduce into the simulated scenarios.
Further research could explore ways to incorporate real-world driving data to enhance the realism of the simulated traffic, as well as methods for systematically validating the safety properties of the generated scenarios. Integrating this approach with other techniques for testing autonomous vehicle safety could also be a fruitful area of investigation.
Conclusion
This research paper presents a novel closed-loop traffic simulation framework that enables precise control over the safety-critical properties of simulated traffic scenarios. By using a guided diffusion model, the researchers can reliably recreate dangerous traffic situations for testing and validating autonomous vehicle systems.
This approach provides a powerful tool for improving the safety and reliability of self-driving car technology before real-world deployment. It allows researchers to explore the limits of autonomous vehicle capabilities in a safe, repeatable manner, which is crucial for ensuring the safety of these systems and building public trust.
Overall, this work represents an important step forward in the development of advanced simulation techniques for autonomous driving, with the potential to significantly impact the field and accelerate the safe deployment of self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

New!LCSim: A Large-Scale Controllable Traffic Simulator
Yuheng Zhang, Tianjian Ouyang, Fudan Yu, Cong Ma, Lei Qiao, Wei Wu, Jian Yuan, Yong Li
0
0
With the rapid development of urban transportation and the continuous advancement in autonomous vehicles, the demand for safely and efficiently testing autonomous driving and traffic optimization algorithms arises, which needs accurate modeling of large-scale urban traffic scenarios. Existing traffic simulation systems encounter two significant limitations. Firstly, they often rely on open-source datasets or manually crafted maps, constraining the scale of simulations. Secondly, vehicle models within these systems tend to be either oversimplified or lack controllability, compromising the authenticity and diversity of the simulations. In this paper, we propose LCSim, a large-scale controllable traffic simulator. LCSim provides map tools for constructing unified high-definition map (HD map) descriptions from open-source datasets including Waymo and Argoverse or publicly available data sources like OpenStreetMap to scale up the simulation scenarios. Also, we integrate diffusion-based traffic simulation into the simulator for realistic and controllable microscopic traffic flow modeling. By leveraging these features, LCSim provides realistic and diverse virtual traffic environments. Code and Demos are available at https://github.com/tsinghua-fib-lab/LCSim.
7/1/2024
NeuroNCAP: Photorealistic Closed-loop Safety Testing for Autonomous Driving
William Ljungbergh, Adam Tonderski, Joakim Johnander, Holger Caesar, Kalle {AA}strom, Michael Felsberg, Christoffer Petersson
0
0
We present a versatile NeRF-based simulator for testing autonomous driving (AD) software systems, designed with a focus on sensor-realistic closed-loop evaluation and the creation of safety-critical scenarios. The simulator learns from sequences of real-world driving sensor data and enables reconfigurations and renderings of new, unseen scenarios. In this work, we use our simulator to test the responses of AD models to safety-critical scenarios inspired by the European New Car Assessment Programme (Euro NCAP). Our evaluation reveals that, while state-of-the-art end-to-end planners excel in nominal driving scenarios in an open-loop setting, they exhibit critical flaws when navigating our safety-critical scenarios in a closed-loop setting. This highlights the need for advancements in the safety and real-world usability of end-to-end planners. By publicly releasing our simulator and scenarios as an easy-to-run evaluation suite, we invite the research community to explore, refine, and validate their AD models in controlled, yet highly configurable and challenging sensor-realistic environments. Code and instructions can be found at https://github.com/atonderski/neuro-ncap
4/24/2024

CtRL-Sim: Reactive and Controllable Driving Agents with Offline Reinforcement Learning
Luke Rowe, Roger Girgis, Anthony Gosselin, Bruno Carrez, Florian Golemo, Felix Heide, Liam Paull, Christopher Pal
0
0
Evaluating autonomous vehicle stacks (AVs) in simulation typically involves replaying driving logs from real-world recorded traffic. However, agents replayed from offline data are not reactive and hard to intuitively control. Existing approaches address these challenges by proposing methods that rely on heuristics or generative models of real-world data but these approaches either lack realism or necessitate costly iterative sampling procedures to control the generated behaviours. In this work, we take an alternative approach and propose CtRL-Sim, a method that leverages return-conditioned offline reinforcement learning to efficiently generate reactive and controllable traffic agents. Specifically, we process real-world driving data through a physics-enhanced Nocturne simulator to generate a diverse offline reinforcement learning dataset, annotated with various reward terms. With this dataset, we train a return-conditioned multi-agent behaviour model that allows for fine-grained manipulation of agent behaviours by modifying the desired returns for the various reward components. This capability enables the generation of a wide range of driving behaviours beyond the scope of the initial dataset, including adversarial behaviours. We demonstrate that CtRL-Sim can generate diverse and realistic safety-critical scenarios while providing fine-grained control over agent behaviours.
6/18/2024
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
Leon Eisemann, Mirjam Fehling-Kaschek, Henrik Gommel, David Hermann, Marvin Klemp, Martin Lauer, Benjamin Lickert, Florian Luettner, Robin Moss, Nicole Neis, Maria Pohle, Simon Romanski, Daniel Stadler, Alexander Stolz, Jens Ziehn, Jingxing Zhou
0
0
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the open world, there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.
5/6/2024