Aerial-NeRF: Adaptive Spatial Partitioning and Sampling for Large-Scale Aerial Rendering
2405.06214
0
0
🏅
Abstract
Recent progress in large-scale scene rendering has yielded Neural Radiance Fields (NeRF)-based models with an impressive ability to synthesize scenes across small objects and indoor scenes. Nevertheless, extending this idea to large-scale aerial rendering poses two critical problems. Firstly, a single NeRF cannot render the entire scene with high-precision for complex large-scale aerial datasets since the sampling range along each view ray is insufficient to cover buildings adequately. Secondly, traditional NeRFs are infeasible to train on one GPU to enable interactive fly-throughs for modeling massive images. Instead, existing methods typically separate the whole scene into multiple regions and train a NeRF on each region, which are unaccustomed to different flight trajectories and difficult to achieve fast rendering. To that end, we propose Aerial-NeRF with three innovative modifications for jointly adapting NeRF in large-scale aerial rendering: (1) Designing an adaptive spatial partitioning and selection method based on drones' poses to adapt different flight trajectories; (2) Using similarity of poses instead of (expert) network for rendering speedup to determine which region a new viewpoint belongs to; (3) Developing an adaptive sampling approach for rendering performance improvement to cover the entire buildings at different heights. Extensive experiments have conducted to verify the effectiveness and efficiency of Aerial-NeRF, and new state-of-the-art results have been achieved on two public large-scale aerial datasets and presented SCUTic dataset. Note that our model allows us to perform rendering over 4 times as fast as compared to multiple competitors. Our dataset, code, and model are publicly available at https://drliuqi.github.io/.
Create account to get full access
Overview
- Proposes a novel approach called "Aerial-NeRF" to address challenges in large-scale aerial scene rendering using neural radiance fields (NeRFs)
- Addresses two main issues: the inability of a single NeRF to render large-scale aerial scenes with high precision, and the infeasibility of training a NeRF on a single GPU for interactive fly-throughs of massive images
- Introduces three key innovations to enable Aerial-NeRF: adaptive spatial partitioning and selection, using pose similarity instead of (expert) networks for rendering speedup, and an adaptive sampling approach for improved rendering performance
Plain English Explanation
Neural radiance fields (NeRFs) are a powerful technique for synthesizing realistic 3D scenes from a collection of 2D images. While NeRFs have shown impressive results for small-scale objects and indoor scenes, extending this approach to large-scale aerial environments poses significant challenges.
The Aerial-NeRF approach proposed in this paper addresses two critical problems in applying NeRFs to large-scale aerial rendering. First, a single NeRF model is not capable of rendering an entire complex, large-scale aerial scene with high precision, as the sampling range along each view ray is insufficient to adequately cover the buildings and other structures. Second, training a NeRF on a single GPU to enable interactive fly-throughs of massive aerial images is not feasible.
To overcome these issues, the researchers introduce three key innovations in Aerial-NeRF:
-
Adaptive spatial partitioning and selection: Rather than using a single NeRF model, Aerial-NeRF dynamically partitions the scene and selects the appropriate NeRF models based on the drone's flight trajectory. This allows the system to adapt to different viewpoints and capture the details of the large-scale scene more effectively.
-
Pose similarity instead of (expert) networks for rendering speedup: Instead of relying on complex neural networks to determine which NeRF model to use for a given viewpoint, Aerial-NeRF uses the similarity between the current viewpoint and the trained NeRF models' poses. This approach is simpler and more efficient, enabling faster rendering.
-
Adaptive sampling for improved rendering performance: To ensure that the entire scene, including buildings at different heights, is covered during rendering, Aerial-NeRF uses an adaptive sampling approach. This dynamically adjusts the sampling density along the view rays to capture the necessary details.
Through extensive experiments, the researchers demonstrate that Aerial-NeRF outperforms existing methods in terms of rendering speed and visual quality on large-scale aerial datasets, including a new dataset called SCUTic. The proposed approach represents a significant advancement in the ability to generate high-quality, interactive visualizations of large-scale aerial environments.
Technical Explanation
The paper introduces the Aerial-NeRF approach to address the limitations of applying traditional NeRF models to large-scale aerial rendering tasks. The key technical innovations are:
-
Adaptive Spatial Partitioning and Selection: To overcome the inability of a single NeRF to render an entire complex, large-scale aerial scene with high precision, Aerial-NeRF dynamically partitions the scene into multiple regions and trains a separate NeRF model for each region. The selection of the appropriate NeRF model for a given viewpoint is based on the similarity of the current pose to the trained NeRF models' poses, rather than relying on a complex neural network. This approach allows Aerial-NeRF to adapt to different flight trajectories and capture the necessary scene details.
-
Pose Similarity for Rendering Speedup: Traditional methods for determining which NeRF model to use for a given viewpoint often rely on expert-designed neural networks. Aerial-NeRF, instead, uses the similarity between the current viewpoint and the trained NeRF models' poses to select the appropriate model. This simpler and more efficient approach enables faster rendering, as it avoids the computational overhead of running a complex neural network.
-
Adaptive Sampling for Improved Rendering Performance: To ensure that the entire scene, including buildings at different heights, is adequately covered during rendering, Aerial-NeRF employs an adaptive sampling approach. This dynamically adjusts the sampling density along the view rays to capture the necessary scene details, resulting in improved rendering performance and visual quality.
The researchers conducted extensive experiments on two public large-scale aerial datasets, as well as a new dataset called SCUTic, to validate the effectiveness and efficiency of Aerial-NeRF. The results demonstrate that Aerial-NeRF outperforms existing methods in terms of rendering speed and visual quality, achieving a rendering speed more than 4 times faster than multiple competitors.
Critical Analysis
The Aerial-NeRF approach represents a significant advancement in the field of large-scale aerial scene rendering using neural radiance fields. The researchers have successfully addressed two critical challenges: the inability of a single NeRF model to capture the details of complex, large-scale aerial environments, and the infeasibility of training a NeRF on a single GPU for interactive fly-throughs of massive aerial images.
While the proposed innovations in Aerial-NeRF are compelling, there are a few potential areas for further research and improvement:
-
Scalability: The paper demonstrates the effectiveness of Aerial-NeRF on large-scale aerial datasets, but it would be interesting to explore the scalability of the approach as the scene size and complexity continue to grow. The adaptive spatial partitioning and selection methods may need to be further refined to handle even larger-scale aerial environments.
-
Generalization: The paper focuses on evaluating Aerial-NeRF on aerial datasets, but it would be valuable to investigate how the approach could be adapted or extended to other large-scale outdoor environments, such as urban landscapes or rural areas. This could help establish the broader applicability of the proposed techniques.
-
Computational Efficiency: While Aerial-NeRF demonstrates significant improvements in rendering speed compared to existing methods, further optimizations or alternative approaches may be explored to achieve even higher computational efficiency, especially for real-time or interactive applications.
Overall, the Aerial-NeRF approach represents an important step forward in the field of large-scale aerial scene rendering and opens up new possibilities for high-quality, interactive visualizations of complex outdoor environments.
Conclusion
The Aerial-NeRF paper proposes a novel approach to addressing the challenges of applying neural radiance fields (NeRFs) to large-scale aerial scene rendering. The researchers introduce three key innovations - adaptive spatial partitioning and selection, pose similarity for rendering speedup, and adaptive sampling for improved performance - to enable high-quality and efficient rendering of complex aerial environments.
Through extensive experiments, the researchers demonstrate that Aerial-NeRF outperforms existing methods in terms of rendering speed and visual quality on large-scale aerial datasets, including a new dataset called SCUTic. The proposed approach represents a significant advancement in the ability to generate high-quality, interactive visualizations of large-scale aerial environments, with potential applications in areas such as urban planning, disaster response, and aerial mapping.
While the Aerial-NeRF approach shows promising results, the paper also highlights potential areas for further research and improvement, such as scalability, generalization to other outdoor environments, and continued optimization of computational efficiency. Overall, the Aerial-NeRF paper makes an important contribution to the field of large-scale scene rendering and sets the stage for further advancements in this exciting area of research.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Multi-tiling Neural Radiance Field (NeRF) -- Geometric Assessment on Large-scale Aerial Datasets
Ningli Xu, Rongjun Qin, Debao Huang, Fabio Remondino
0
0
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
6/7/2024

FlyNeRF: NeRF-Based Aerial Mapping for High-Quality 3D Scene Reconstruction
Maria Dronova, Vladislav Cheremnykh, Alexey Kotcov, Aleksey Fedoseev, Dzmitry Tsetserukou
0
0
Current methods for 3D reconstruction and environmental mapping frequently face challenges in achieving high precision, highlighting the need for practical and effective solutions. In response to this issue, our study introduces FlyNeRF, a system integrating Neural Radiance Fields (NeRF) with drone-based data acquisition for high-quality 3D reconstruction. Utilizing unmanned aerial vehicle (UAV) for capturing images and corresponding spatial coordinates, the obtained data is subsequently used for the initial NeRF-based 3D reconstruction of the environment. Further evaluation of the reconstruction render quality is accomplished by the image evaluation neural network developed within the scope of our system. According to the results of the image evaluation module, an autonomous algorithm determines the position for additional image capture, thereby improving the reconstruction quality. The neural network introduced for render quality assessment demonstrates an accuracy of 97%. Furthermore, our adaptive methodology enhances the overall reconstruction quality, resulting in an average improvement of 2.5 dB in Peak Signal-to-Noise Ratio (PSNR) for the 10% quantile. The FlyNeRF demonstrates promising results, offering advancements in such fields as environmental monitoring, surveillance, and digital twins, where high-fidelity 3D reconstructions are crucial.
4/22/2024
Multiplane Prior Guided Few-Shot Aerial Scene Rendering
Zihan Gao, Licheng Jiao, Lingling Li, Xu Liu, Fang Liu, Puhua Chen, Yuwei Guo
0
0
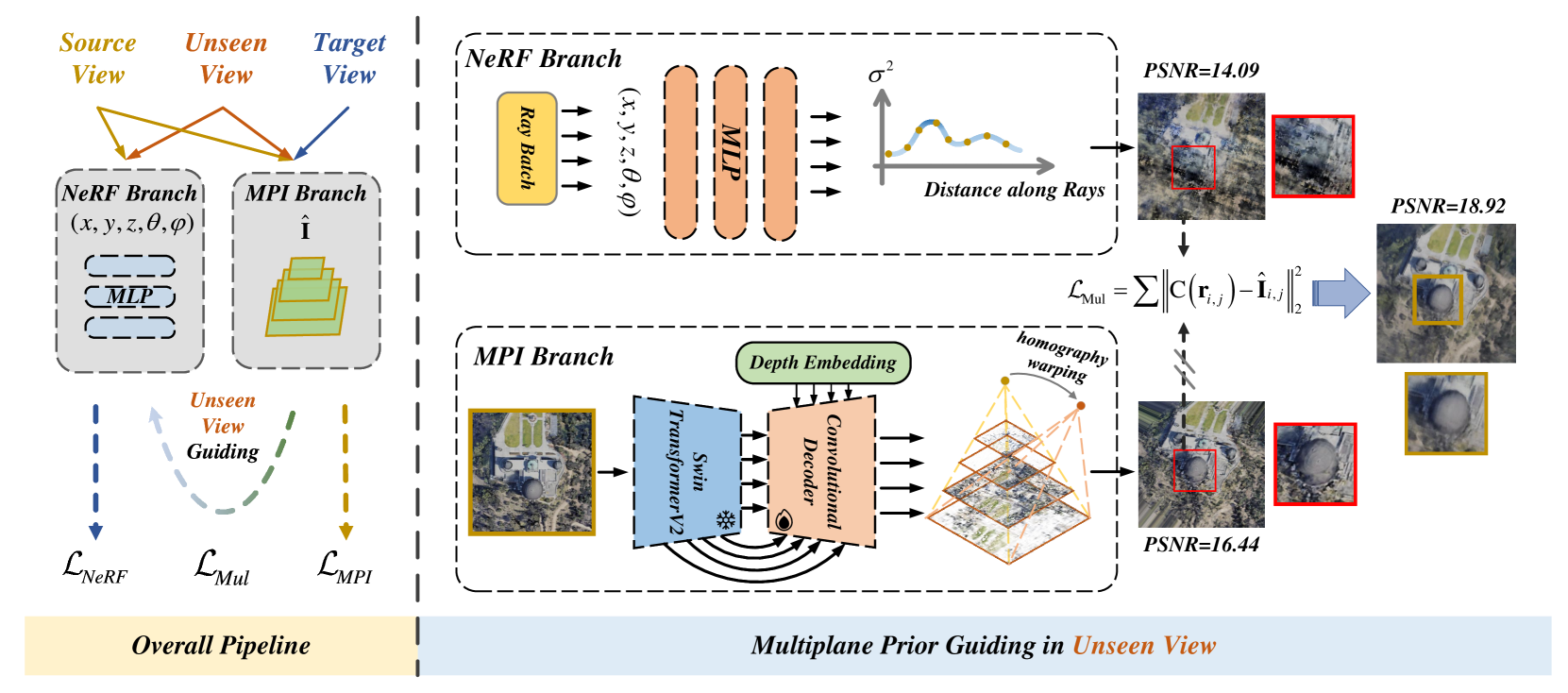
Neural Radiance Fields (NeRF) have been successfully applied in various aerial scenes, yet they face challenges with sparse views due to limited supervision. The acquisition of dense aerial views is often prohibitive, as unmanned aerial vehicles (UAVs) may encounter constraints in perspective range and energy constraints. In this work, we introduce Multiplane Prior guided NeRF (MPNeRF), a novel approach tailored for few-shot aerial scene rendering-marking a pioneering effort in this domain. Our key insight is that the intrinsic geometric regularities specific to aerial imagery could be leveraged to enhance NeRF in sparse aerial scenes. By investigating NeRF's and Multiplane Image (MPI)'s behavior, we propose to guide the training process of NeRF with a Multiplane Prior. The proposed Multiplane Prior draws upon MPI's benefits and incorporates advanced image comprehension through a SwinV2 Transformer, pre-trained via SimMIM. Our extensive experiments demonstrate that MPNeRF outperforms existing state-of-the-art methods applied in non-aerial contexts, by tripling the performance in SSIM and LPIPS even with three views available. We hope our work offers insights into the development of NeRF-based applications in aerial scenes with limited data.
6/10/2024

AG-NeRF: Attention-guided Neural Radiance Fields for Multi-height Large-scale Outdoor Scene Rendering
Jingfeng Guo, Xiaohan Zhang, Baozhu Zhao, Qi Liu
0
0
Existing neural radiance fields (NeRF)-based novel view synthesis methods for large-scale outdoor scenes are mainly built on a single altitude. Moreover, they often require a priori camera shooting height and scene scope, leading to inefficient and impractical applications when camera altitude changes. In this work, we propose an end-to-end framework, termed AG-NeRF, and seek to reduce the training cost of building good reconstructions by synthesizing free-viewpoint images based on varying altitudes of scenes. Specifically, to tackle the detail variation problem from low altitude (drone-level) to high altitude (satellite-level), a source image selection method and an attention-based feature fusion approach are developed to extract and fuse the most relevant features of target view from multi-height images for high-fidelity rendering. Extensive experiments demonstrate that AG-NeRF achieves SOTA performance on 56 Leonard and Transamerica benchmarks and only requires a half hour of training time to reach the competitive PSNR as compared to the latest BungeeNeRF.
4/19/2024