Aerial Push-Button with Two-Stage Tactile Feedback using Reflected Airborne Ultrasound Focus

0
🌐
Sign in to get full access
Overview
- Developed a new aerial push-button with tactile feedback using focused airborne ultrasound
- Key novelties: 1) ultrasound emitters behind the user's finger, 2) two-stage tactile feedback during button pressing and release
Plain English Explanation
This research proposes a new type of aerial push-button that provides tactile feedback using focused airborne ultrasound. The key innovations are:
-
The ultrasound emitters are placed behind the user's finger, and the reflected ultrasound is focused just above a solid surface under the finger. This creates a tactile sensation on the fingertip.
-
The tactile feedback is presented in two stages - when the user presses the button and when they release their finger from the button. This two-stage approach is more effective at enhancing the perceived tactile sensation and feeling of input completion, compared to a single-stage approach.
The advantage of this design is that the input surface can be a thin, generic plane, including touch panels, and still be able to provide tactile feedback only when the user interacts with it. This makes the system simpler and more practical to implement than past airborne ultrasound tactile interfaces.
Technical Explanation
The researchers developed a push-button system that uses focused airborne ultrasound to provide tactile feedback to the user's fingertip. Ultrasound emitters are placed behind the user's finger, and the reflected ultrasound is focused just above a solid surface under the finger. This creates a localized tactile sensation on the finger pad.
Importantly, the tactile feedback is presented in two stages - when the user presses the button and when they release their finger from the button. This two-stage approach was found to be more effective at enhancing the perceived tactile sensation and feeling of input completion, compared to a single-stage approach used in previous research.
The researchers conducted experiments to evaluate the effectiveness of the two-stage tactile feedback approach. They found that it significantly strengthened the perceived tactile stimulation and feeling of input completion, compared to a conventional single-stage method.
Critical Analysis
The researchers acknowledge that while their proposed system offers advantages in terms of practicality and effectiveness, there are still some limitations. For example, the range and localization of the tactile feedback may be constrained by the physical setup and the properties of the airborne ultrasound.
Additionally, the user experience and perceived realism of the tactile feedback could be further improved. The researchers suggest exploring ways to enhance the sensation, such as using more advanced ultrasound control techniques or combining the tactile feedback with other modalities.
Overall, the researchers have developed a novel and practical approach to providing tactile feedback in an aerial push-button interface. The two-stage feedback mechanism is a significant advancement, but there is still room for further improvements and refinements to enhance the user experience.
Conclusion
This research presents a new aerial push-button system that uses focused airborne ultrasound to provide tactile feedback to the user's fingertip. The key innovations are the two-stage tactile feedback mechanism and the ability to implement the system on a thin, generic input surface.
The two-stage tactile feedback, with sensations during both button pressing and release, was found to be more effective at enhancing the perceived tactile stimulation and feeling of input completion. This makes the proposed system a more practical and useful solution for airborne ultrasound tactile interfaces compared to previous approaches.
While the researchers have made significant advancements, there is still potential for further improvements in the range, localization, and overall user experience of the tactile feedback. Exploring these areas could lead to even more compelling and intuitive aerial push-button interfaces in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌐
0
Aerial Push-Button with Two-Stage Tactile Feedback using Reflected Airborne Ultrasound Focus
Hiroya Sugawara, Masaya Takasaki, Keisuke Hasegawa
We developed a new aerial push-button with tactile feedback using focused airborne ultrasound. This study has two significant novelties compared to past related studies: 1) ultrasound emitters are equipped behind the user's finger and reflected ultrasound emission that is focused just above the solid plane placed under the finger presents tactile feedback to a finger pad, and 2) tactile feedback is presented at two stages during pressing motion; at the time of pushing the button and withdrawing the finger from it. The former has a significant advantage in apparatus implementation in that the input surface of the device can be composed of a generic thin plane including touch panels, potentially capable of presenting input touch feedback only when the user touches objects on the screen. We experimentally found that the two-stage tactile presentation is much more effective in strengthening perceived tactile stimulation and feeling of input completion when compared with a conventional single-stage method. This study proposes a composition of an aerial push-button in much more practical use than ever. The proposed system composition is expected to be one of the simplest frameworks in the airborne ultrasound tactile interface.
Read more7/2/2024
0
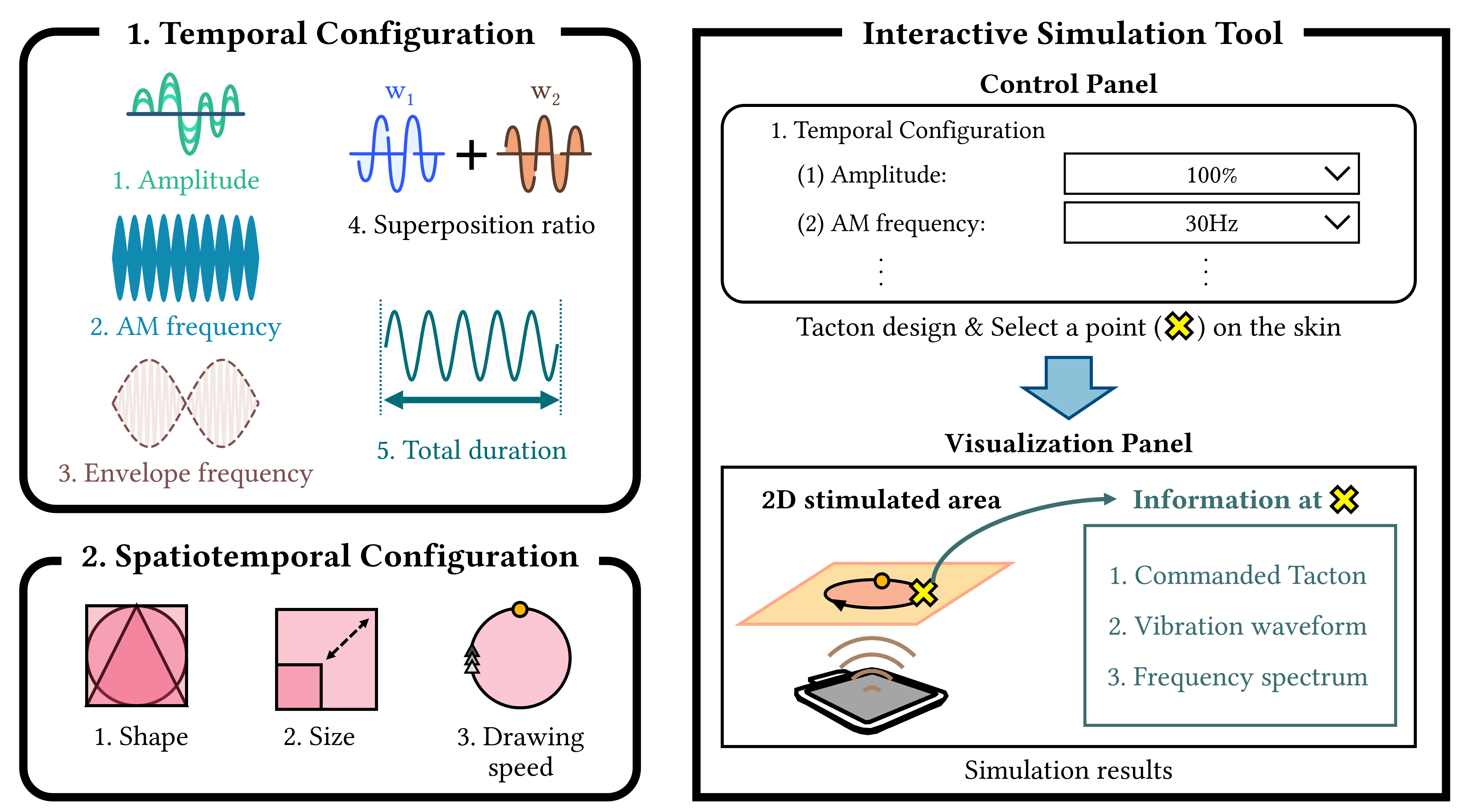
An Interactive Tool for Simulating Mid-Air Ultrasound Tactons on the Skin
Chungman Lim, Hasti Seifi, Gunhyuk Park
Mid-air ultrasound haptic technology offers a myriad of temporal and spatial parameters for contactless haptic design. Yet, predicting how these parameters interact to render an ultrasound signal is difficult before testing them on a mid-air ultrasound haptic device. Thus, haptic designers often use a trial-and-error process with different parameter combinations to obtain desired tactile patterns (i.e., Tactons) for user applications. We propose an interactive tool with five temporal and three spatiotemporal design parameters that can simulate the temporal and spectral properties of stimulation at specific skin points. As a preliminary verification, we measured vibrations induced from the ultrasound Tactons varying on one temporal and two spatiotemporal parameters. The measurements and simulation showed similar results for three different ultrasound rendering techniques, suggesting the efficacy of the simulation tool. We present key insights from the simulation and discuss future directions for enhancing the capabilities of simulations.
Read more5/7/2024
0
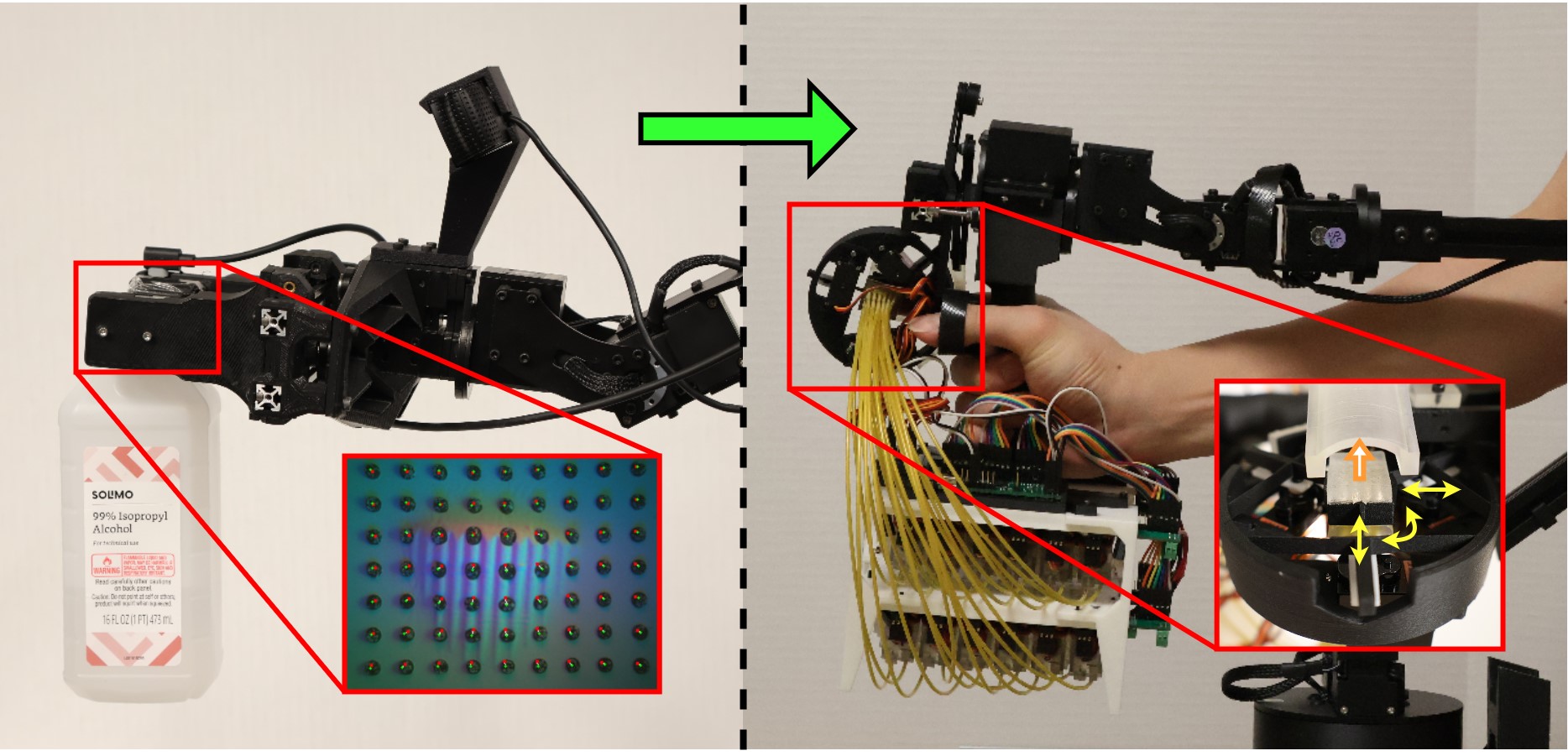
Feelit: Combining Compliant Shape Displays with Vision-Based Tactile Sensors for Real-Time Teletaction
Oscar Yu, Yu She
Teletaction, the transmission of tactile feedback or touch, is a crucial aspect in the field of teleoperation. High-quality teletaction feedback allows users to remotely manipulate objects and increase the quality of the human-machine interface between the operator and the robot, making complex manipulation tasks possible. Advances in the field of teletaction for teleoperation however, have yet to make full use of the high-resolution 3D data provided by modern vision-based tactile sensors. Existing solutions for teletaction lack in one or more areas of form or function, such as fidelity or hardware footprint. In this paper, we showcase our design for a low-cost teletaction device that can utilize real-time high-resolution tactile information from vision-based tactile sensors, through both physical 3D surface reconstruction and shear displacement. We present our device, the Feelit, which uses a combination of a pin-based shape display and compliant mechanisms to accomplish this task. The pin-based shape display utilizes an array of 24 servomotors with miniature Bowden cables, giving the device a resolution of 6x4 pins in a 15x10 mm display footprint. Each pin can actuate up to 3 mm in 200 ms, while providing 80 N of force and 1.5 um of depth resolution. Shear displacement and rotation is achieved using a compliant mechanism design, allowing a minimum of 1 mm displacement laterally and 10 degrees of rotation. This real-time 3D tactile reconstruction is achieved with the use of a vision-based tactile sensor, the GelSight [1], along with an algorithm that samples the depth data and marker tracking to generate actuator commands. Through a series of experiments including shape recognition and relative weight identification, we show that our device has the potential to expand teletaction capabilities in the teleoperation space.
Read more8/29/2024

0
AeroHaptix: A Wearable Vibrotactile Feedback System for Enhancing Collision Avoidance in UAV Teleoperation
Bingjian Huang, Zhecheng Wang, Qilong Cheng, Siyi Ren, Hanfeng Cai, Antonio Alvarez Valdivia, Karthik Mahadevan, Daniel Wigdor
Haptic feedback enhances collision avoidance by providing directional obstacle information to operators in unmanned aerial vehicle (UAV) teleoperation. However, such feedback is often rendered via haptic joysticks, which are unfamiliar to UAV operators and limited to single-directional force feedback. Additionally, the direct coupling of the input device and the feedback method diminishes the operators' control authority and causes oscillatory movements. To overcome these limitations, we propose AeroHaptix, a wearable haptic feedback system that uses high-resolution vibrations to communicate multiple obstacle directions simultaneously. The vibrotactile actuators' layout was optimized based on a perceptual study to eliminate perceptual biases and achieve uniform spatial coverage. A novel rendering algorithm, MultiCBF, was adapted from control barrier functions to support multi-directional feedback. System evaluation showed that AeroHaptix effectively reduced collisions in complex environment, and operators reported significantly lower physical workload, improved situational awareness, and increased control authority.
Read more7/18/2024