Feelit: Combining Compliant Shape Displays with Vision-Based Tactile Sensors for Real-Time Teletaction

0
Sign in to get full access
Overview
- Feelit combines compliant shape displays with vision-based tactile sensors for real-time teletaction
- Enables remote users to feel the shape and texture of objects in real-time
- Utilizes a modular design with interchangeable components for flexibility
- Provides haptic feedback through a soft, deformable surface that can mimic the shape and feel of remote objects
Plain English Explanation
The Feelit system allows remote users to experience the shape and texture of objects in real-time, as if they were physically touching them. It does this by combining two key technologies:
-
Compliant Shape Displays: A soft, deformable surface that can change its shape to match the form of remote objects. This allows the user to feel the contours and texture of the object.
-
Vision-Based Tactile Sensors: Cameras that track the movement and deformation of the compliant surface, providing detailed information about the object's shape and the forces being applied.
The system has a modular design, meaning the individual components can be easily swapped out or upgraded. This allows the researchers to experiment with different materials, sensor types, and display configurations to find the optimal setup.
The goal of Feelit is to create a more immersive and realistic teletaction experience, where users can remotely manipulate and "feel" objects as if they were physically present. This could have applications in areas like telemedicine, remote maintenance, and even virtual reality interactions.
Technical Explanation
The core of the Feelit system is a compliant shape display - a soft, deformable surface that can change its shape in response to the shape of a remote object. This is achieved using an array of pneumatic actuators that individually control the height of different regions of the surface.
To sense the shape and texture of the remote object, Feelit uses a vision-based tactile sensing system. Cameras track the movement and deformation of the compliant surface, allowing the system to reconstruct the shape and forces being applied.
The information from the tactile sensors is then used to update the shape of the compliant display in real-time, providing the user with a continuous, dynamic representation of the remote object. The researchers also integrated additional sensors, such as force sensors, to enhance the fidelity of the haptic feedback.
Feelit's modular design allows the researchers to experiment with different display materials, sensor configurations, and actuation mechanisms. This flexibility enables them to optimize the system for factors like weight, cost, and power consumption, as well as explore new interaction modalities.
Critical Analysis
The research team has done a thorough job of designing and evaluating the Feelit system, addressing key challenges in teletaction such as real-time shape reconstruction and haptic feedback.
One potential limitation is the current size and resolution of the compliant display, which may limit the level of detail that can be conveyed. As the researchers mention, scaling up the display size and increasing the number of actuators could improve the system's ability to faithfully reproduce the shape and texture of remote objects.
Additionally, the system's reliance on vision-based tactile sensing means it may be sensitive to environmental factors like lighting and occlusion. Exploring alternative sensing modalities, such as integrated force and shear sensors, could help address these limitations and improve the robustness of the system.
Overall, the Feelit system represents an exciting step forward in the field of teletaction, demonstrating the potential for combining compliant displays and advanced sensing to create more immersive and realistic remote interaction experiences.
Conclusion
The Feelit system combines compliant shape displays and vision-based tactile sensors to enable real-time teletaction, allowing remote users to feel the shape and texture of objects as if they were physically present. Its modular design and flexible approach to sensing and actuation make it a promising platform for further research and development in this field.
By bridging the gap between visual and haptic feedback, Feelit opens up new possibilities for remote collaboration, telemedicine, and even virtual reality interactions, where users can fully engage with digital environments through touch. As the researchers continue to refine and scale the system, it could become an increasingly valuable tool for a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Feelit: Combining Compliant Shape Displays with Vision-Based Tactile Sensors for Real-Time Teletaction
Oscar Yu, Yu She
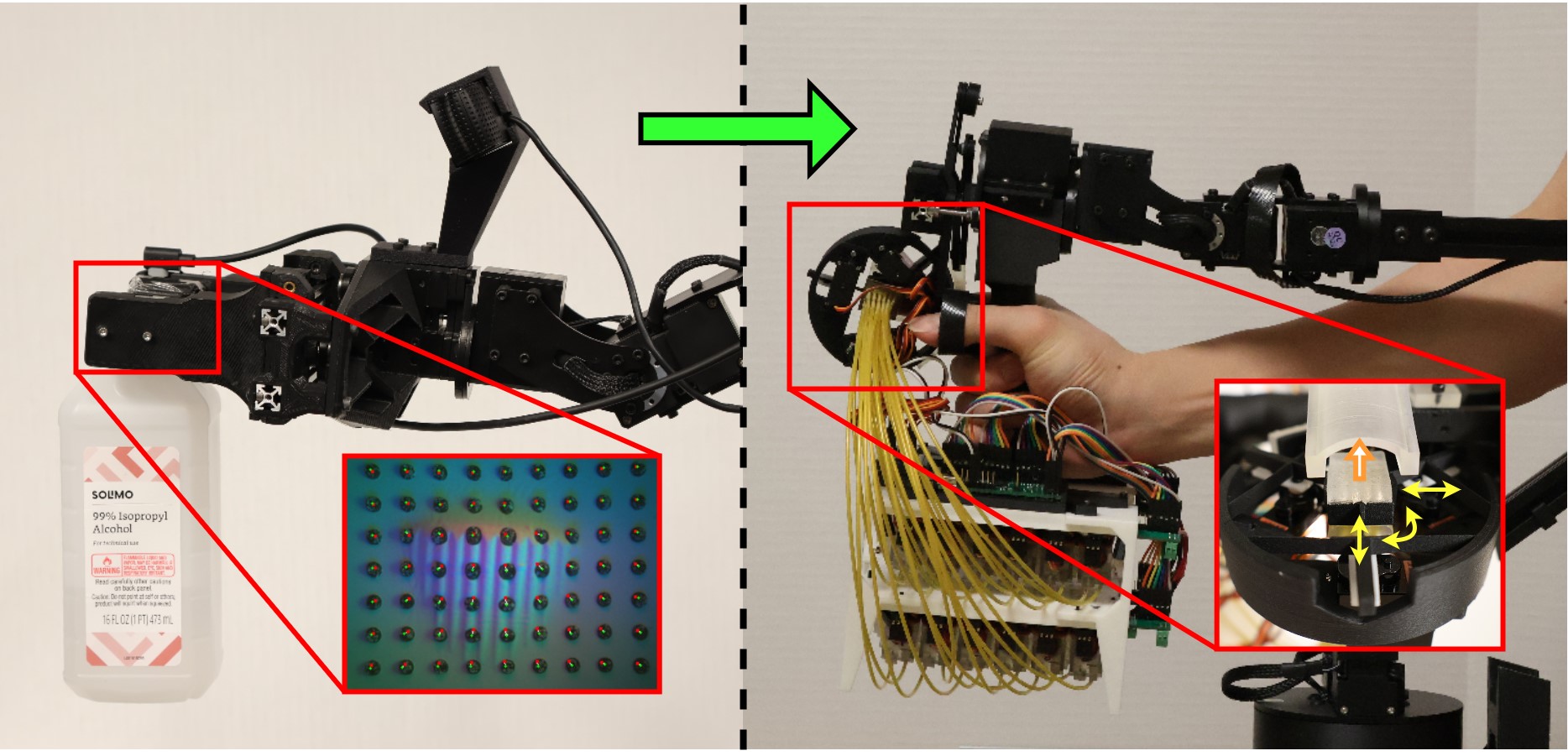
Teletaction, the transmission of tactile feedback or touch, is a crucial aspect in the field of teleoperation. High-quality teletaction feedback allows users to remotely manipulate objects and increase the quality of the human-machine interface between the operator and the robot, making complex manipulation tasks possible. Advances in the field of teletaction for teleoperation however, have yet to make full use of the high-resolution 3D data provided by modern vision-based tactile sensors. Existing solutions for teletaction lack in one or more areas of form or function, such as fidelity or hardware footprint. In this paper, we showcase our design for a low-cost teletaction device that can utilize real-time high-resolution tactile information from vision-based tactile sensors, through both physical 3D surface reconstruction and shear displacement. We present our device, the Feelit, which uses a combination of a pin-based shape display and compliant mechanisms to accomplish this task. The pin-based shape display utilizes an array of 24 servomotors with miniature Bowden cables, giving the device a resolution of 6x4 pins in a 15x10 mm display footprint. Each pin can actuate up to 3 mm in 200 ms, while providing 80 N of force and 1.5 um of depth resolution. Shear displacement and rotation is achieved using a compliant mechanism design, allowing a minimum of 1 mm displacement laterally and 10 degrees of rotation. This real-time 3D tactile reconstruction is achieved with the use of a vision-based tactile sensor, the GelSight [1], along with an algorithm that samples the depth data and marker tracking to generate actuator commands. Through a series of experiments including shape recognition and relative weight identification, we show that our device has the potential to expand teletaction capabilities in the teleoperation space.
Read more8/29/2024
📈
0
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Noah Becker, Erik Gattung, Kay Hansel, Tim Schneider, Yaonan Zhu, Yasuhisa Hasegawa, Jan Peters
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
Read more5/1/2024
✨
0
Telextiles: End-to-end Remote Transmission of Fabric Tactile Sensation
Takekazu Kitagishi, Yuichi Hiroi, Yuna Watanabe, Yuta Itoh, Jun Rekimoto
The tactile sensation of textiles is critical in determining the comfort of clothing. For remote use, such as online shopping, users cannot physically touch the textile of clothes, making it difficult to evaluate its tactile sensation. Tactile sensing and actuation devices are required to transmit the tactile sensation of textiles. The sensing device needs to recognize different garments, even with hand-held sensors. In addition, the existing actuation device can only present a limited number of known patterns and cannot transmit unknown tactile sensations of textiles. To address these issues, we propose Telextiles, an interface that can remotely transmit tactile sensations of textiles by creating a latent space that reflects the proximity of textiles through contrastive self-supervised learning. We confirm that textiles with similar tactile features are located close to each other in the latent space through a two-dimensional plot. We then compress the latent features for known textile samples into the 1D distance and apply the 16 textile samples to the rollers in the order of the distance. The roller is rotated to select the textile with the closest feature if an unknown textile is detected.
Read more5/7/2024
🤿
0
Multimodal and Force-Matched Imitation Learning with a See-Through Visuotactile Sensor
Trevor Ablett, Oliver Limoyo, Adam Sigal, Affan Jilani, Jonathan Kelly, Kaleem Siddiqi, Francois Hogan, Gregory Dudek
Contact-rich tasks continue to present a variety of challenges for robotic manipulation. In this work, we leverage a multimodal visuotactile sensor within the framework of imitation learning (IL) to perform contact rich tasks that involve relative motion (slipping/sliding) between the end-effector and object. We introduce two algorithmic contributions, tactile force matching and learned mode switching, as complimentary methods for improving IL. Tactile force matching enhances kinesthetic teaching by reading approximate forces during the demonstration and generating an adapted robot trajectory that recreates the recorded forces. Learned mode switching uses IL to couple visual and tactile sensor modes with the learned motion policy, simplifying the transition from reaching to contacting. We perform robotic manipulation experiments on four door opening tasks with a variety of observation and method configurations to study the utility of our proposed improvements and multimodal visuotactile sensing. Our results show that the inclusion of force matching raises average policy success rates by 62.5%, visuotactile mode switching by 30.3%, and visuotactile data as a policy input by 42.5%, emphasizing the value of see-through tactile sensing for IL, both for data collection to allow force matching, and for policy execution to allow accurate task feedback.
Read more6/27/2024