Air-FAR: Fast and Adaptable Routing for Aerial Navigation in Large-scale Complex Unknown Environments

0
Sign in to get full access
Overview
- This paper presents "Air-FAR", a fast and adaptable routing algorithm for aerial navigation in large, complex, and unknown environments.
- The key innovation is an efficient path planning approach that can rapidly generate collision-free trajectories while adapting to dynamic changes in the environment.
- The algorithm is designed to enable agile and reliable navigation of aerial vehicles in challenging real-world settings.
Plain English Explanation
The paper introduces a new routing algorithm called "Air-FAR" that is designed to help aerial vehicles, like drones or flying robots, navigate through large and complex environments that may be unknown or constantly changing. The main idea is to enable these vehicles to quickly plan paths that avoid obstacles, while also being able to adapt those paths in real-time as the environment changes around them.
This is an important capability, as aerial vehicles often need to operate in urban areas, forests, or other complex settings where the layout of the environment may not be fully known ahead of time, and obstacles can suddenly appear or move. The Air-FAR algorithm aims to address these challenges by generating collision-free trajectories very rapidly, and then continuously updating those trajectories as new information about the environment becomes available.
By being both fast and adaptable, the Air-FAR algorithm could enable aerial vehicles to navigate more safely and reliably in real-world scenarios, such as search and rescue operations, package delivery, or autonomous inspection tasks. This could have important applications in fields like logistics, disaster response, and environmental monitoring.
Technical Explanation
The key innovation of the Air-FAR algorithm is its use of a hierarchical planning approach that combines a global planner to generate an initial route, and a local planner to quickly adapt that route in response to changes in the environment.
The global planner uses a novel variant of the Rapidly-exploring Random Tree (RRT) algorithm to quickly find a coarse, collision-free path through the environment. This global plan is then passed to the local planner, which uses a gradient-based optimization technique to smooth and refine the path, ensuring it is dynamically feasible for the aerial vehicle.
Crucially, the local planner can efficiently update the path in real-time as new obstacles or hazards are detected, allowing the vehicle to navigate through dynamic environments. The authors demonstrate that Air-FAR is able to generate collision-free trajectories over 100 times faster than traditional planning approaches, while also maintaining good adaptability to changes.
The paper also includes an extensive experimental evaluation of Air-FAR, validating its performance in simulation and on real-world aerial vehicles across a variety of complex scenarios.
Critical Analysis
The Air-FAR algorithm appears to be a promising approach for enabling robust and reliable aerial navigation in challenging environments. By combining fast global planning with adaptive local refinement, the method seems well-suited to handle the dynamism and uncertainty often encountered in real-world settings.
That said, the paper does not fully address some potential limitations or areas for further research. For example, the authors do not discuss how the algorithm would scale to very large environments or handle complex, cluttered spaces with many obstacles. Additionally, the evaluation is primarily focused on simulation, and more real-world testing would be needed to fully assess the algorithm's capabilities and robustness.
It would also be valuable to explore how Air-FAR might be extended to handle additional constraints, such as energy efficiency, sensor limitations, or the coordination of multiple aerial vehicles. Investigating these aspects could further broaden the applicability of the approach.
Overall, the Air-FAR algorithm represents an interesting and promising contribution to the field of aerial navigation, but additional research and development would be needed to fully realize its potential in real-world scenarios.
Conclusion
The Air-FAR algorithm presented in this paper offers a fast and adaptable approach to path planning for aerial vehicles operating in large, complex, and unknown environments. By combining efficient global planning with real-time local adaptation, the method aims to enable agile and reliable navigation in challenging real-world settings.
While the paper demonstrates promising results in simulation, further research and development would be needed to fully address the algorithm's scalability, robustness, and ability to handle additional constraints. Nonetheless, the Air-FAR approach represents an important step forward in enabling more autonomous and capable aerial navigation systems, with potential applications in areas such as logistics, disaster response, and environmental monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Air-FAR: Fast and Adaptable Routing for Aerial Navigation in Large-scale Complex Unknown Environments
Botao He, Guofei Chen, Cornelia Fermuller, Yiannis Aloimonos, Ji Zhang
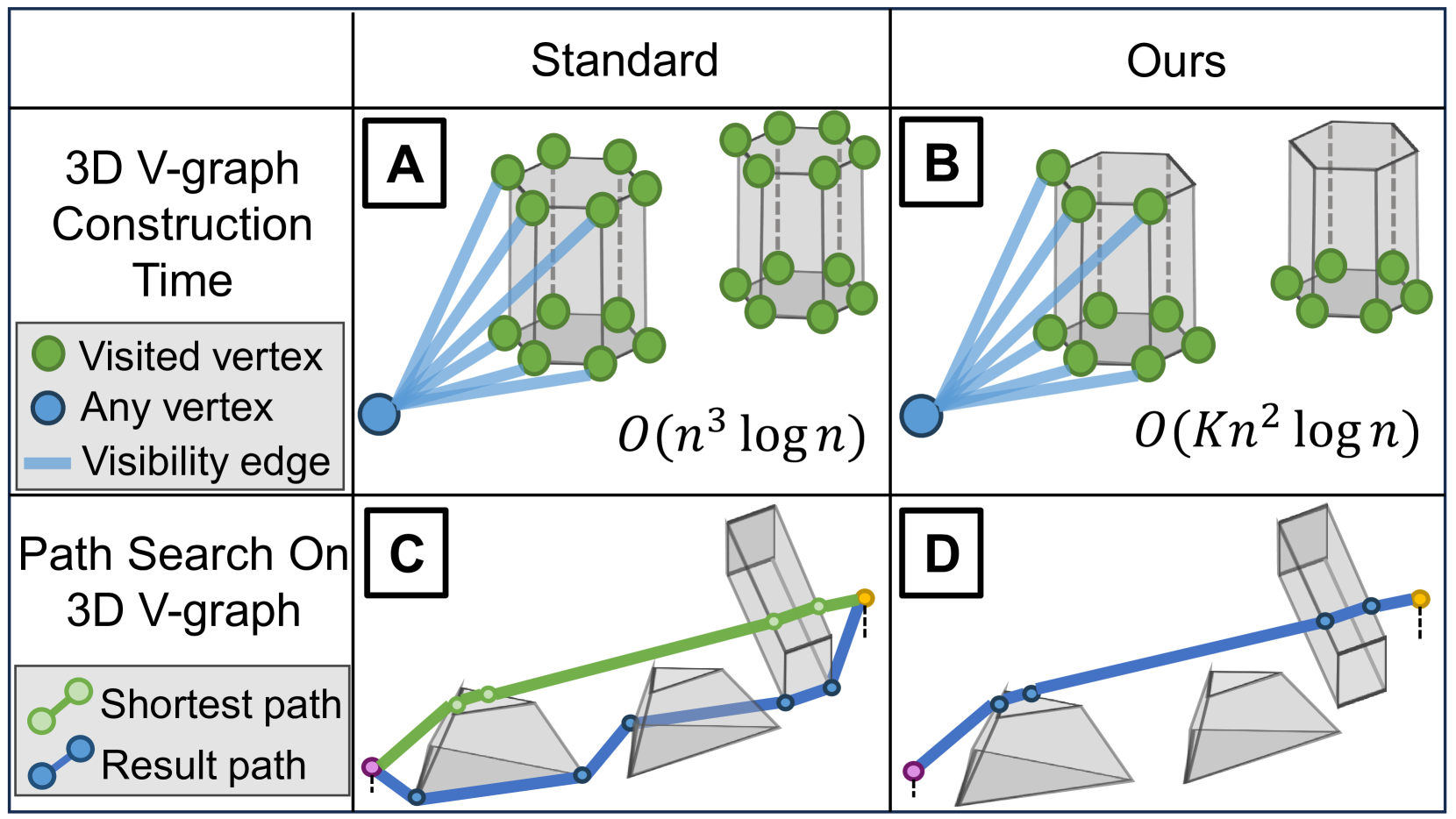
This paper presents a novel method for real-time 3D navigation in large-scale, complex environments using a hierarchical 3D visibility graph (V-graph). The proposed algorithm addresses the computational challenges of V-graph construction and shortest path search on the graph simultaneously. By introducing hierarchical 3D V-graph construction with heuristic visibility update, the 3D V-graph is constructed in O(K*n^2logn) time, which guarantees real-time performance. The proposed iterative divide-and-conquer path search method can achieve near-optimal path solutions within the constraints of real-time operations. The algorithm ensures efficient 3D V-graph construction and path search. Extensive simulated and real-world environments validated that our algorithm reduces the travel time by 42%, achieves up to 24.8% higher trajectory efficiency, and runs faster than most benchmarks by orders of magnitude in complex environments. The code and developed simulator have been open-sourced to facilitate future research.
Read more9/18/2024

0
Interactive-FAR:Interactive, Fast and Adaptable Routing for Navigation Among Movable Obstacles in Complex Unknown Environments
Botao He, Guofei Chen, Wenshan Wang, Ji Zhang, Cornelia Fermuller, Yiannis Aloimonos
This paper introduces a real-time algorithm for navigating complex unknown environments cluttered with movable obstacles. Our algorithm achieves fast, adaptable routing by actively attempting to manipulate obstacles during path planning and adjusting the global plan from sensor feedback. The main contributions include an improved dynamic Directed Visibility Graph (DV-graph) for rapid global path searching, a real-time interaction planning method that adapts online from new sensory perceptions, and a comprehensive framework designed for interactive navigation in complex unknown or partially known environments. Our algorithm is capable of replanning the global path in several milliseconds. It can also attempt to move obstacles, update their affordances, and adapt strategies accordingly. Extensive experiments validate that our algorithm reduces the travel time by 33%, achieves up to 49% higher path efficiency, and runs faster than traditional methods by orders of magnitude in complex environments. It has been demonstrated to be the most efficient solution in terms of speed and efficiency for interactive navigation in environments of such complexity. We also open-source our code in the docker demo to facilitate future research.
Read more4/12/2024

0
Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
Read more6/19/2024
🛠️
0
High-Speed Motion Planning for Aerial Swarms in Unknown and Cluttered Environments
Charbel Toumieh, Dario Floreano
Coordinated flight of multiple drones allows to achieve tasks faster such as search and rescue and infrastructure inspection. Thus, pushing the state-of-the-art of aerial swarms in navigation speed and robustness is of tremendous benefit. In particular, being able to account for unexplored/unknown environments when planning trajectories allows for safer flight. In this work, we propose the first high-speed, decentralized, and synchronous motion planning framework (HDSM) for an aerial swarm that explicitly takes into account the unknown/undiscovered parts of the environment. The proposed approach generates an optimized trajectory for each planning agent that avoids obstacles and other planning agents while moving and exploring the environment. The only global information that each agent has is the target location. The generated trajectory is high-speed, safe from unexplored spaces, and brings the agent closer to its goal. The proposed method outperforms four recent state-of-the-art methods in success rate (100% success in reaching the target location), flight speed (97% faster), and flight time (50% lower). Finally, the method is validated on a set of Crazyflie nano-drones as a proof of concept.
Read more7/15/2024