Under-Canopy Navigation using Aerial Lidar Maps
2404.03911
0
0

Abstract
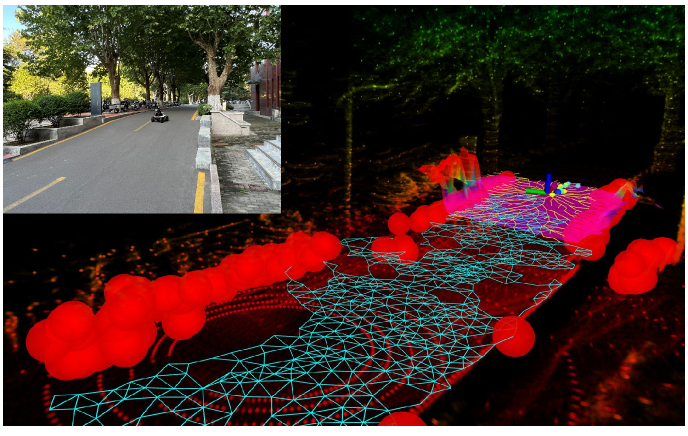
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
Create account to get full access
Overview
- This paper describes a method for navigating through dense forest environments using aerial lidar maps.
- The authors present a navigation system that can plan collision-free paths through complex, under-canopy environments by utilizing a pre-existing 3D map generated from aerial lidar data.
- The system was evaluated through simulation and field experiments, demonstrating its ability to effectively navigate through challenging forest terrains.
Plain English Explanation
Navigating through dense forests can be extremely challenging for robots and autonomous vehicles, as the thick vegetation and uneven terrain make it difficult to avoid obstacles and find safe paths. The researchers in this paper propose a solution that uses detailed 3D maps created from aerial lidar scanners to help a robot navigate through these environments.
Lidar is a remote sensing technology that uses lasers to measure distances and create 3D maps of the surrounding environment. By using a pre-existing lidar map of the forest, the robot's navigation system can plan collision-free paths that weave through the trees and bushes. This allows the robot to safely traverse the complex under-canopy terrain without getting stuck or running into obstacles.
The key innovation in this research is the ability to leverage overhead lidar data to guide the robot's navigation, rather than relying solely on sensors mounted on the robot itself. This gives the robot a much more comprehensive understanding of the 3D structure of the forest, enabling it to plan more effective routes.
The researchers tested their navigation system in both simulation and real-world forest environments, and the results showed that it could successfully guide the robot through the cluttered terrain while avoiding collisions. This type of technology could be valuable for applications like forest monitoring, search and rescue operations, or autonomous delivery in hard-to-reach areas.
Technical Explanation
The paper presents a navigation system that utilizes pre-existing 3D maps created from aerial lidar data to plan collision-free paths through densely vegetated forest environments. The system integrates the lidar map with real-time sensor data from the robot to localize its position and dynamically update the navigation plan as it moves through the environment.
The key components of the navigation architecture include:
-
Lidar-based Map Generation: The authors leverage aerial lidar mapping techniques to create a detailed 3D model of the forest canopy and underlying terrain.
-
Localization: The robot uses a combination of sensors and mapping algorithms to determine its current pose within the pre-built lidar map.
-
Path Planning: The navigation system employs a tree-based motion planning approach to generate collision-free trajectories through the complex forest environment.
-
Dynamic Replanning: As the robot moves, it continuously updates its position estimate and re-plans its path to account for changes in the environment or deviations from the original plan.
The authors evaluate their approach through both simulation and field experiments, demonstrating the system's ability to effectively navigate through dense, under-canopy forest terrains. The results highlight the benefits of leveraging high-resolution 3D maps to guide autonomous navigation in challenging environments.
Critical Analysis
The authors acknowledge several limitations and areas for future work in their research. One key limitation is the reliance on a pre-existing lidar map, which may not always be available or up-to-date in dynamic environments. The authors suggest that incorporating real-time lidar sensing on the robot could help address this issue, but integrating such sensors adds complexity and cost to the system.
Another potential concern is the accuracy and resolution of the lidar maps, which can be affected by factors like vegetation density, terrain complexity, and sensor limitations. The authors do not provide a detailed analysis of how map quality might impact the navigation performance, which could be an important area for further investigation.
Additionally, the field experiments were conducted in relatively simple forest environments, and the authors note that more complex, multi-layered canopies may pose additional challenges for their navigation system. Evaluating the system's performance in a wider range of forest conditions would help validate its robustness and generalizability.
Overall, the authors present a promising approach for under-canopy navigation that leverages aerial lidar data, but there are several opportunities for further research and development to address the identified limitations and expand the system's capabilities.
Conclusion
This paper introduces a navigation system that utilizes pre-existing 3D lidar maps to guide autonomous robots through dense, under-canopy forest environments. By integrating the lidar data with real-time sensor feedback, the system can plan and dynamically update collision-free paths, enabling effective navigation through complex, cluttered terrains.
The authors' evaluation of the system in both simulation and field experiments demonstrates its potential for applications such as forest monitoring, search and rescue operations, and autonomous delivery in hard-to-reach areas. While the current approach has some limitations, the research highlights the value of leveraging high-resolution 3D maps to enhance the navigation capabilities of autonomous systems in challenging natural environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024
❗
Lessons from Deploying CropFollow++: Under-Canopy Agricultural Navigation with Keypoints
Arun N. Sivakumar, Mateus V. Gasparino, Michael McGuire, Vitor A. H. Higuti, M. Ugur Akcal, Girish Chowdhary
0
0
We present a vision-based navigation system for under-canopy agricultural robots using semantic keypoints. Autonomous under-canopy navigation is challenging due to the tight spacing between the crop rows ($sim 0.75$ m), degradation in RTK-GPS accuracy due to multipath error, and noise in LiDAR measurements from the excessive clutter. Our system, CropFollow++, introduces modular and interpretable perception architecture with a learned semantic keypoint representation. We deployed CropFollow++ in multiple under-canopy cover crop planting robots on a large scale (25 km in total) in various field conditions and we discuss the key lessons learned from this.
4/30/2024

LiDAR-Based Crop Row Detection Algorithm for Over-Canopy Autonomous Navigation in Agriculture Fields
Ruiji Liu, Francisco Yandun, George Kantor
0
0
Autonomous navigation is crucial for various robotics applications in agriculture. However, many existing methods depend on RTK-GPS systems, which are expensive and susceptible to poor signal coverage. This paper introduces a state-of-the-art LiDAR-based navigation system that can achieve over-canopy autonomous navigation in row-crop fields, even when the canopy fully blocks the interrow spacing. Our crop row detection algorithm can detect crop rows across diverse scenarios, encompassing various crop types, growth stages, weeds presence, and discontinuities within the crop rows. Without utilizing the global localization of the robot, our navigation system can perform autonomous navigation in these challenging scenarios, detect the end of the crop rows, and navigate to the next crop row autonomously, providing a crop-agnostic approach to navigate the whole row-crop field. This navigation system has undergone tests in various simulated agricultural fields, achieving an average of 2.98cm autonomous driving accuracy without human intervention on the custom Amiga robot. In addition, the qualitative results of our crop row detection algorithm from the actual soybean fields validate our LiDAR-based crop row detection algorithm's potential for practical agricultural applications.
5/9/2024
UAV Navigation in Tunnels with 2D tilted LiDARs
Danilo Tardioli, Lorenzo Cano, Alejandro R. Mosteo
0
0
Navigation of UAVs in challenging environments like tunnels or mines, where it is not possible to use GNSS methods to self-localize, illumination may be uneven or nonexistent, and wall features are likely to be scarce, is a complex task, especially if the navigation has to be done at high speed. In this paper we propose a novel proof-of-concept navigation technique for UAVs based on the use of LiDAR information through the joint use of geometric and machine-learning algorithms. The perceived information is processed by a deep neural network to establish the yaw of the UAV with respect to the tunnel's longitudinal axis, in order to adjust the direction of navigation. Additionally, a geometric method is used to compute the safest location inside the tunnel (i.e. the one that maximizes the distance to the closest obstacle). This information proves to be sufficient for simple yet effective navigation in straight and curved tunnels.
4/16/2024