AirShot: Efficient Few-Shot Detection for Autonomous Exploration

0
Sign in to get full access
Overview
- This paper introduces a new few-shot object detection model called AirShot, designed for autonomous exploration tasks.
- Few-shot learning aims to enable object detection with limited training data, which is crucial for applications like autonomous drones operating in novel environments.
- AirShot leverages meta-learning to quickly adapt to new objects and scenes, achieving efficient few-shot detection performance.
Plain English Explanation
AirShot is a new machine learning model that can quickly learn to detect objects, even when it has only seen a few examples of those objects before. This is important for autonomous robots and drones that need to navigate and explore new environments, where they may encounter objects they haven't been extensively trained on.
Traditional object detection models require a large amount of training data to work well. But AirShot uses a technique called "meta-learning" to learn how to learn efficiently. This allows it to adapt quickly to new objects and scenes, just by seeing a few examples.
The key idea is that AirShot doesn't just learn to detect specific objects. Instead, it learns a general process for detecting objects, which it can then apply to new situations. This makes the model much more flexible and adaptable than traditional approaches.
Technical Explanation
The core of AirShot is a meta-learning framework that allows the model to quickly adapt to new object classes with limited training data. This is achieved through a novel meta-learning architecture that consists of:
- A Feature Extractor that learns generic visual features
- A Relation Module that models the similarity between object instances
- A Prediction Head that classifies and localizes objects based on the extracted features and relation information
During meta-training, AirShot learns to optimize this entire architecture for few-shot object detection, such that it can rapidly adapt to new object classes with just a handful of examples. The model is trained on a diverse set of object classes, so that it can generalize its learning process to unseen classes during test time.
The authors evaluate AirShot on several few-shot object detection benchmarks, demonstrating significant performance improvements over state-of-the-art approaches. This highlights the effectiveness of AirShot's meta-learning approach for enabling efficient few-shot object detection, a crucial capability for autonomous exploration tasks.
Critical Analysis
The authors provide a thorough evaluation of AirShot, comparing it to a wide range of prior few-shot object detection methods across multiple datasets. The results clearly demonstrate the advantages of AirShot's meta-learning approach, which outperforms competing techniques by a substantial margin.
However, the paper does not address some potential limitations of the approach. For example, it is unclear how AirShot would perform in scenarios with significant domain shift, where the training and testing environments differ greatly. The authors also do not explore the model's robustness to noisy or incomplete training data, which could be a concern for real-world deployment.
Additionally, while the meta-learning framework is a key innovation, the specific architectural choices for the feature extractor, relation module, and prediction head are not thoroughly justified. It would be helpful to understand the design rationale and the importance of each component to the overall performance.
Despite these minor shortcomings, the paper represents an important step forward in few-shot object detection, a critical capability for autonomous systems operating in dynamic and unpredictable environments. Further research is needed to address the identified limitations and explore the broader applicability of the AirShot approach.
Conclusion
The AirShot model introduced in this paper demonstrates the potential of meta-learning techniques for enabling efficient few-shot object detection. By learning a generalizable learning process, AirShot can quickly adapt to new object classes with limited training data, a crucial capability for autonomous exploration and navigation tasks.
The authors' thorough experimental evaluation showcases the significant performance improvements of AirShot over state-of-the-art few-shot object detection methods. This suggests that the meta-learning approach employed in AirShot could have wide-ranging applications in robotics, assistive technologies, and other domains where rapid adaptation to novel environments and objects is required.
While the paper identifies some avenues for future research, the core contributions of AirShot represent an important step towards more versatile and efficient object detection systems, paving the way for increasingly capable autonomous agents that can navigate and interact with the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AirShot: Efficient Few-Shot Detection for Autonomous Exploration
Zihan Wang, Bowen Li, Chen Wang, Sebastian Scherer
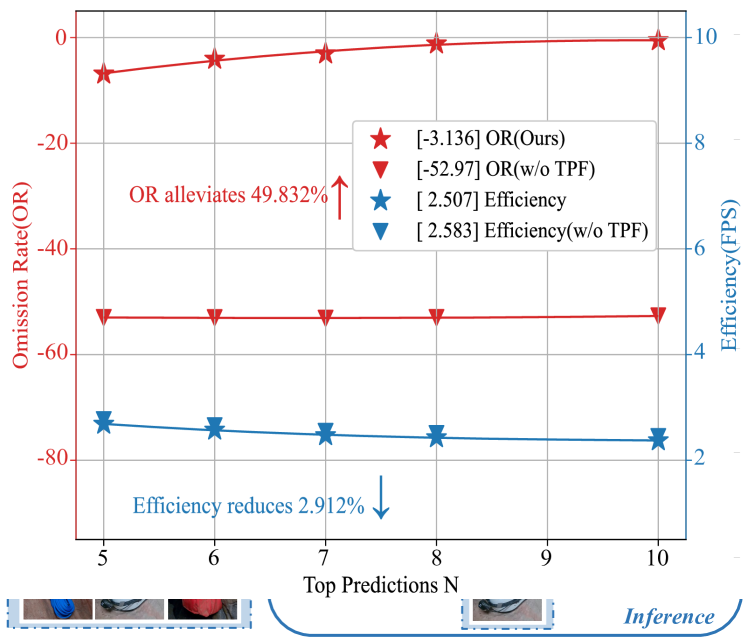
Few-shot object detection has drawn increasing attention in the field of robotic exploration, where robots are required to find unseen objects with a few online provided examples. Despite recent efforts have been made to yield online processing capabilities, slow inference speeds of low-powered robots fail to meet the demands of real-time detection-making them impractical for autonomous exploration. Existing methods still face performance and efficiency challenges, mainly due to unreliable features and exhaustive class loops. In this work, we propose a new paradigm AirShot, and discover that, by fully exploiting the valuable correlation map, AirShot can result in a more robust and faster few-shot object detection system, which is more applicable to robotics community. The core module Top Prediction Filter (TPF) can operate on multi-scale correlation maps in both the training and inference stages. During training, TPF supervises the generation of a more representative correlation map, while during inference, it reduces looping iterations by selecting top-ranked classes, thus cutting down on computational costs with better performance. Surprisingly, this dual functionality exhibits general effectiveness and efficiency on various off-the-shelf models. Exhaustive experiments on COCO2017, VOC2014, and SubT datasets demonstrate that TPF can significantly boost the efficacy and efficiency of most off-the-shelf models, achieving up to 36.4% precision improvements along with 56.3% faster inference speed. Code and Data are at: https://github.com/ImNotPrepared/AirShot.
Read more4/9/2024

0
Review of Zero-Shot and Few-Shot AI Algorithms in The Medical Domain
Maged Badawi, Mohammedyahia Abushanab, Sheethal Bhat, Andreas Maier
In this paper, different techniques of few-shot, zero-shot, and regular object detection have been investigated. The need for few-shot learning and zero-shot learning techniques is crucial and arises from the limitations and challenges in traditional machine learning, deep learning, and computer vision methods where they require large amounts of data, plus the poor generalization of those traditional methods. Those techniques can give us prominent results by using only a few training sets reducing the required amounts of data and improving the generalization. This survey will highlight the recent papers of the last three years that introduce the usage of few-shot learning and zero-shot learning techniques in addressing the challenges mentioned earlier. In this paper we reviewed the Zero-shot, few-shot and regular object detection methods and categorized them in an understandable manner. Based on the comparison made within each category. It been found that the approaches are quite impressive. This integrated review of diverse papers on few-shot, zero-shot, and regular object detection reveals a shared focus on advancing the field through novel frameworks and techniques. A noteworthy observation is the scarcity of detailed discussions regarding the difficulties encountered during the development phase. Contributions include the introduction of innovative models, such as ZSD-YOLO and GTNet, often showcasing improvements with various metrics such as mean average precision (mAP),Recall@100 (RE@100), the area under the receiver operating characteristic curve (AUROC) and precision. These findings underscore a collective move towards leveraging vision-language models for versatile applications, with potential areas for future research including a more thorough exploration of limitations and domain-specific adaptations.
Read more6/26/2024

0
InfRS: Incremental Few-Shot Object Detection in Remote Sensing Images
Wuzhou Li, Jiawei Zhou, Xiang Li, Yi Cao, Guang Jin, Xuemin Zhang
Recently, the field of few-shot detection within remote sensing imagery has witnessed significant advancements. Despite these progresses, the capacity for continuous conceptual learning still poses a significant challenge to existing methodologies. In this paper, we explore the intricate task of incremental few-shot object detection in remote sensing images. We introduce a pioneering fine-tuningbased technique, termed InfRS, designed to facilitate the incremental learning of novel classes using a restricted set of examples, while concurrently preserving the performance on established base classes without the need to revisit previous datasets. Specifically, we pretrain the model using abundant data from base classes and then generate a set of class-wise prototypes that represent the intrinsic characteristics of the data. In the incremental learning stage, we introduce a Hybrid Prototypical Contrastive (HPC) encoding module for learning discriminative representations. Furthermore, we develop a prototypical calibration strategy based on the Wasserstein distance to mitigate the catastrophic forgetting problem. Comprehensive evaluations on the NWPU VHR-10 and DIOR datasets demonstrate that our model can effectively solve the iFSOD problem in remote sensing images. Code will be released.
Read more5/21/2024

0
Small Object Few-shot Segmentation for Vision-based Industrial Inspection
Zilong Zhang, Chang Niu, Zhibin Zhao, Xingwu Zhang, Xuefeng Chen
Vision-based industrial inspection (VII) aims to locate defects quickly and accurately. Supervised learning under a close-set setting and industrial anomaly detection, as two common paradigms in VII, face different problems in practical applications. The former is that various and sufficient defects are difficult to obtain, while the latter is that specific defects cannot be located. To solve these problems, in this paper, we focus on the few-shot semantic segmentation (FSS) method, which can locate unseen defects conditioned on a few annotations without retraining. Compared to common objects in natural images, the defects in VII are small. This brings two problems to current FSS methods: 1 distortion of target semantics and 2 many false positives for backgrounds. To alleviate these problems, we propose a small object few-shot segmentation (SOFS) model. The key idea for alleviating 1 is to avoid the resizing of the original image and correctly indicate the intensity of target semantics. SOFS achieves this idea via the non-resizing procedure and the prototype intensity downsampling of support annotations. To alleviate 2, we design an abnormal prior map in SOFS to guide the model to reduce false positives and propose a mixed normal Dice loss to preferentially prevent the model from predicting false positives. SOFS can achieve FSS and few-shot anomaly detection determined by support masks. Diverse experiments substantiate the superior performance of SOFS. Code is available at https://github.com/zhangzilongc/SOFS.
Read more8/1/2024