An Application Layer Multi-Hop Collective Perception Service for Vehicular Adhoc Networks

0
Sign in to get full access
Overview
This research paper proposes a multi-hop collective perception service for vehicular ad-hoc networks (VANETs). The service aims to improve road safety and traffic efficiency by enabling vehicles to share their sensor data and perception information with nearby vehicles, extending their awareness beyond their line of sight.
Plain English Explanation
Imagine you're driving on a busy highway and suddenly a pedestrian steps out in front of you, but you can't see them because a large truck is blocking your view. With this new service, the truck could detect the pedestrian and send that information to your car, allowing you to slow down and avoid a collision, even though you couldn't see the pedestrian yourself.
The key idea is to create a network where vehicles can share the information they gather from their sensors, like cameras and radar. This allows each vehicle to build a more comprehensive picture of the surrounding environment, including hazards and obstacles that may be hidden from its own sensors. By sharing this information across multiple vehicles, the network can provide a "collective perception" that goes beyond what any single vehicle can see.
The researchers have designed this as a service that runs on top of the existing VANET infrastructure, making it easier to deploy and integrate with existing systems. Their goal is to improve road safety and traffic flow by giving drivers and autonomous vehicles a better understanding of their surroundings.
Technical Explanation
The paper proposes an application-layer multi-hop collective perception service for VANETs. The service uses a publish-subscribe model to allow vehicles to share their sensor data and perception information with nearby vehicles. This information is then aggregated and processed to create a more comprehensive view of the environment.
The system architecture includes a central server that manages the data sharing and processing, as well as a set of software modules running on each vehicle. These modules handle tasks like data collection, message encoding, and dissemination. The researchers also describe a multi-hop message forwarding mechanism to extend the range of the shared information.
The paper presents the design of the key system components, including the data models, communication protocols, and algorithms for information aggregation and dissemination. It also includes an evaluation of the system's performance, which shows improvements in terms of detection range, update latency, and overall situational awareness compared to a single-hop approach.
Critical Analysis
The paper provides a well-designed and comprehensive solution for improving collective perception in VANETs. The multi-hop approach addresses the limited communication range of individual vehicles, allowing the system to scale and provide more complete coverage.
However, the paper does not fully address potential challenges related to data privacy and security. As vehicles share sensitive sensor data, there are concerns about protecting user privacy and ensuring the integrity of the shared information. The researchers mention these issues briefly but do not provide a detailed discussion of the mitigation strategies.
Additionally, the performance evaluation could be expanded to consider more realistic urban environments and a wider range of scenarios, including different traffic densities and vehicle behaviors. This would help better understand the practical limitations and trade-offs of the proposed approach.
Conclusion
This research paper presents a promising approach for enhancing road safety and traffic efficiency in VANETs through a multi-hop collective perception service. By enabling vehicles to share their sensor data and perception information across the network, the system can provide a more comprehensive view of the surrounding environment, helping drivers and autonomous vehicles make better-informed decisions.
While the technical details and evaluation are convincing, the researchers should address the privacy and security implications more thoroughly, and consider a broader range of evaluation scenarios to fully assess the system's performance and limitations. Overall, this work represents a valuable contribution to the field of vehicular ad-hoc networks and connected autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Application Layer Multi-Hop Collective Perception Service for Vehicular Adhoc Networks
Vincent Albert Wolff, Edmir Xhoxhi, Felix Tautz
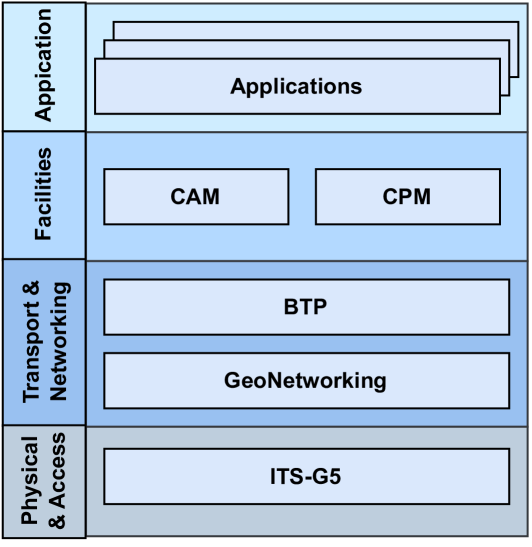
Collective Perception will play a crucial role for ensuring vehicular safety in the near future, enabling the sharing of local perceived objects with other Intelligent Transport System Stations (ITS-Ss). However, at the beginning of the roll-out, low market penetration rates are expected. This paper proposes and evaluates an application layer multi-hop Collective Perception Service (CPS) for vehicular ad-hoc networks. The goal is to improve the environmental awareness ratio in scenarios with low CPS market penetration. In such scenarios, the CPS service without forwarding enabled struggles to achieve complete awareness. A decentralized application layer forwarding algorithm is presented that shares perceived object information across multiple hops while maintaining a low age of information. The proposed approach is compared against standard CPS with no forwarding and CPS with geographically-scoped (GBC) multi-hop forwarding. Simulations according to standards of the European Telecommunications Standards Institute (ETSI) demonstrate that the application layer forwarding achieves near 100% awareness at 10% penetration rate versus 92% for standard CPS. The awareness improvement comes with moderate channel load, unlike GBC forwarding which quickly saturates the channel. The median age of information remains below 80 ms for the proposed scheme, enabling real-time CPS operation. Our application layer multi-hop approach effectively improves environmental awareness during initial CPS deployment while aligning with latency and channel load requirements.
Read more4/12/2024

0
Enhanced Cooperative Perception for Autonomous Vehicles Using Imperfect Communication
Ahmad Sarlak, Hazim Alzorgan, Sayed Pedram Haeri Boroujeni, Abolfazl Razi, Rahul Amin
Sharing and joint processing of camera feeds and sensor measurements, known as Cooperative Perception (CP), has emerged as a new technique to achieve higher perception qualities. CP can enhance the safety of Autonomous Vehicles (AVs) where their individual visual perception quality is compromised by adverse weather conditions (haze as foggy weather), low illumination, winding roads, and crowded traffic. To cover the limitations of former methods, in this paper, we propose a novel approach to realize an optimized CP under constrained communications. At the core of our approach is recruiting the best helper from the available list of front vehicles to augment the visual range and enhance the Object Detection (OD) accuracy of the ego vehicle. In this two-step process, we first select the helper vehicles that contribute the most to CP based on their visual range and lowest motion blur. Next, we implement a radio block optimization among the candidate vehicles to further improve communication efficiency. We specifically focus on pedestrian detection as an exemplary scenario. To validate our approach, we used the CARLA simulator to create a dataset of annotated videos for different driving scenarios where pedestrian detection is challenging for an AV with compromised vision. Our results demonstrate the efficacy of our two-step optimization process in improving the overall performance of cooperative perception in challenging scenarios, substantially improving driving safety under adverse conditions. Finally, we note that the networking assumptions are adopted from LTE Release 14 Mode 4 side-link communication, commonly used for Vehicle-to-Vehicle (V2V) communication. Nonetheless, our method is flexible and applicable to arbitrary V2V communications.
Read more4/15/2024
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
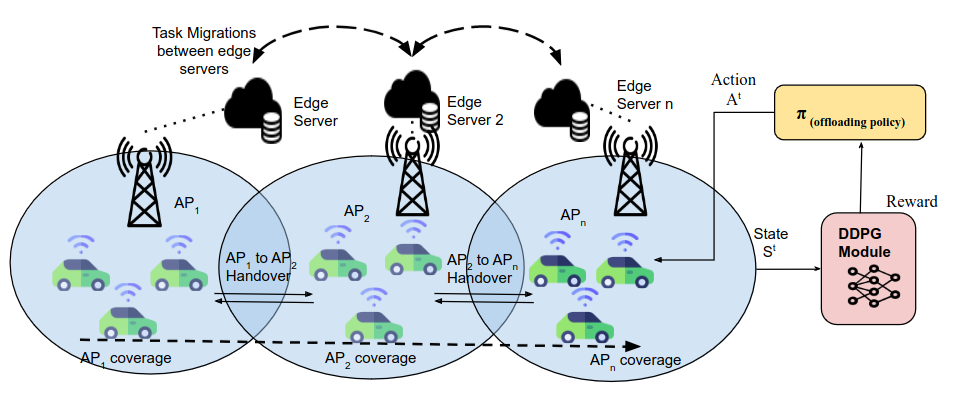
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024

0
C-MASS: Combinatorial Mobility-Aware Sensor Scheduling for Collaborative Perception with Second-Order Topology Approximation
Yukuan Jia, Yuxuan Sun, Ruiqing Mao, Zhaojun Nan, Sheng Zhou, Zhisheng Niu
Collaborative Perception (CP) has been a promising solution to address occlusions in the traffic environment by sharing sensor data among collaborative vehicles (CoV) via vehicle-to-everything (V2X) network. With limited wireless bandwidth, CP necessitates task-oriented and receiver-aware sensor scheduling to prioritize important and complementary sensor data. However, due to vehicular mobility, it is challenging and costly to obtain the up-to-date perception topology, i.e., whether a combination of CoVs can jointly detect an object. In this paper, we propose a combinatorial mobility-aware sensor scheduling (C-MASS) framework for CP with minimal communication overhead. Specifically, detections are replayed with sensor data from individual CoVs and pairs of CoVs to maintain an empirical perception topology up to the second order, which approximately represents the complete perception topology. A hybrid greedy algorithm is then proposed to solve a variant of the budgeted maximum coverage problem with a worst-case performance guarantee. The C-MASS scheduling algorithm adapts the greedy algorithm by incorporating the topological uncertainty and the unexplored time of CoVs to balance exploration and exploitation, addressing the mobility challenge. Extensive numerical experiments demonstrate the near-optimality of the proposed C-MASS framework in both edge-assisted and distributed CP configurations. The weighted recall improvements over object-level CP are 5.8% and 4.2%, respectively. Compared to distance-based and area-based greedy heuristics, the gaps to the offline optimal solutions are reduced by up to 75% and 71%, respectively.
Read more7/2/2024