Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles

0
Sign in to get full access
Overview
- This paper proposes a communication-aware and consistent edge selection algorithm for mobile users and autonomous vehicles.
- The algorithm aims to improve quality of service and user experience by considering both communication and application requirements.
- It uses a multi-objective optimization approach to balance factors like latency, bandwidth, and application preferences.
Plain English Explanation
The paper introduces a new way to choose the right "edge" computing resources for mobile devices and self-driving cars. Edge computing refers to processing data closer to the devices that generate it, rather than sending it all the way to a central cloud.
The key innovation is that this algorithm takes into account both the communication needs (like low latency and high bandwidth) and the application needs (like specific hardware or software requirements) when deciding which edge server to use. Previous approaches often focused on just one or the other.
By balancing these different factors through multi-objective optimization, the algorithm aims to provide a better overall quality of service and user experience. For example, it might choose an edge server that's not quite as fast, but has a more reliable network connection.
Technical Explanation
The paper presents a communication-aware and consistent edge selection algorithm for mobile users and autonomous vehicles. The algorithm uses a multi-objective optimization approach to balance factors like latency, bandwidth, and application-specific requirements when deciding which edge server to use.
Key components of the algorithm include:
- Communication Model: Considers parameters like signal strength, interference, and channel conditions to estimate the available bandwidth and latency between the device and each potential edge server.
- Application Model: Incorporates the specific hardware and software requirements of the user's application to ensure compatibility with the selected edge server.
- Multi-Objective Optimization: Simultaneously optimizes for communication performance, application requirements, and other factors like energy consumption to find the best tradeoff.
The authors evaluate the algorithm through simulation experiments and show that it outperforms previous edge selection approaches in terms of metrics like latency, throughput, and application success rate.
Critical Analysis
The paper presents a well-designed and comprehensive approach to edge server selection that addresses an important challenge in mobile and autonomous vehicle computing. By considering both communication and application factors, the algorithm has the potential to significantly improve quality of service and user experience.
However, the paper does not discuss some potential limitations or areas for further research:
- The simulations are based on idealized models and may not fully capture the complexity of real-world edge computing environments. Further evaluation on realistic testbeds could provide additional insights.
- The algorithm assumes that all the necessary information (e.g., device capabilities, application requirements, network conditions) is available and accurate. In practice, obtaining this information may be challenging, especially in dynamic and heterogeneous edge computing systems.
- The paper focuses on a single user or vehicle, but in a real-world scenario, there would be many competing devices vying for the same edge resources. Extending the algorithm to handle resource contention and fairness across multiple users is an important area for future research.
Conclusion
This paper presents a novel communication-aware and consistent edge selection algorithm that aims to improve quality of service and user experience for mobile users and autonomous vehicles. By considering both communication and application requirements through multi-objective optimization, the algorithm shows promising results in simulation experiments.
While the paper does not address all the practical challenges of real-world edge computing, it represents an important step forward in developing more intelligent and context-aware edge selection strategies. Further research to address the identified limitations and evaluate the algorithm in more realistic settings could lead to significant advancements in the field of mobile and autonomous vehicle computing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Communication-Aware Consistent Edge Selection for Mobile Users and Autonomous Vehicles
Nazish Tahir, Ramviyas Parasuraman, Haijian Sun
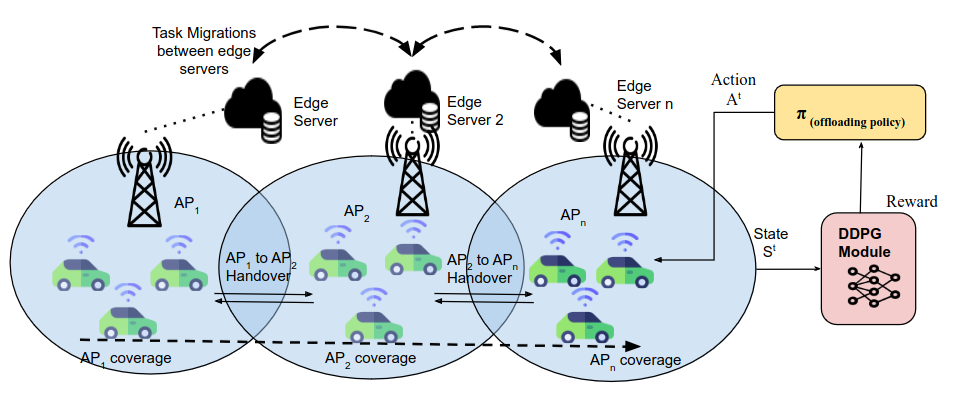
Offloading time-sensitive, computationally intensive tasks-such as advanced learning algorithms for autonomous driving-from vehicles to nearby edge servers, vehicle-to-infrastructure (V2I) systems, or other collaborating vehicles via vehicle-to-vehicle (V2V) communication enhances service efficiency. However, whence traversing the path to the destination, the vehicle's mobility necessitates frequent handovers among the access points (APs) to maintain continuous and uninterrupted wireless connections to maintain the network's Quality of Service (QoS). These frequent handovers subsequently lead to task migrations among the edge servers associated with the respective APs. This paper addresses the joint problem of task migration and access-point handover by proposing a deep reinforcement learning framework based on the Deep Deterministic Policy Gradient (DDPG) algorithm. A joint allocation method of communication and computation of APs is proposed to minimize computational load, service latency, and interruptions with the overarching goal of maximizing QoS. We implement and evaluate our proposed framework on simulated experiments to achieve smooth and seamless task switching among edge servers, ultimately reducing latency.
Read more8/9/2024

0
Hierarchical Reinforcement Learning Empowered Task Offloading in V2I Networks
Xinyu You, Haojie Yan, Yuedong Xu, Lifeng Wang, Liangui Dai
Edge computing plays an essential role in the vehicle-to-infrastructure (V2I) networks, where vehicles offload their intensive computation tasks to the road-side units for saving energy and reduce the latency. This paper designs the optimal task offloading policy to address the concerns involving processing delay, energy consumption and edge computing cost. Each computation task consisting of some interdependent sub-tasks is characterized as a directed acyclic graph (DAG). In such dynamic networks, a novel hierarchical Offloading scheme is proposed by leveraging deep reinforcement learning (DRL). The inter-dependencies among the DAGs of the computation tasks are extracted using a graph neural network with attention mechanism. A parameterized DRL algorithm is developed to deal with the hierarchical action space containing both discrete and continuous actions. Simulation results with a real-world car speed dataset demonstrate that the proposed scheme can effectively reduce the system overhead.
Read more5/21/2024
🤿
0
A Deep RL Approach on Task Placement and Scaling of Edge Resources for Cellular Vehicle-to-Network Service Provisioning
Cyril Shih-Huan Hsu, Jorge Mart'in-P'erez, Danny De Vleeschauwer, Koteswararao Kondepu, Luca Valcarenghi, Xi Li, Chrysa Papagianni
Cellular-Vehicle-to-Everything (C-V2X) is currently at the forefront of the digital transformation of our society. By enabling vehicles to communicate with each other and with the traffic environment using cellular networks, we redefine transportation, improving road safety and transportation services, increasing efficiency of vehicular traffic flows, and reducing environmental impact. To effectively facilitate the provisioning of Cellular Vehicular-to-Network (C-V2N) services, we tackle the interdependent problems of service task placement and scaling of edge resources. Specifically, we formulate the joint problem and prove that it is not computationally tractable. To address its complexity we introduce a Deep Hybrid Policy Gradient (DHPG), a Deep Reinforcement Learning (DRL) approach for hybrid action spaces.The performance of DHPG is evaluated against several state-of-the-art (SoA) solutions through simulations employing a real-world C-V2N traffic dataset. The results demonstrate that DHPG outperforms SoA solutions in maintaining C-V2N service latency below the preset delay threshold, while simultaneously optimizing the utilization of computing resources. Finally, time complexity analysis is conducted to verify that the proposed approach can support real-time C-V2N services.
Read more7/10/2024
🌐
0
DRL-Based RAT Selection in a Hybrid Vehicular Communication Network
Badreddine Yacine Yacheur (LaBRI), Toufik Ahmed (LaBRI), Mohamed Mosbah (LaBRI)
Cooperative intelligent transport systems rely on a set of Vehicle-to-Everything (V2X) applications to enhance road safety. Emerging new V2X applications like Advanced Driver Assistance Systems (ADASs) and Connected Autonomous Driving (CAD) applications depend on a significant amount of shared data and require high reliability, low end-to-end (E2E) latency, and high throughput. However, present V2X communication technologies such as ITS-G5 and C-V2X (Cellular V2X) cannot satisfy these requirements alone. In this paper, we propose an intelligent, scalable hybrid vehicular communication architecture that leverages the performance of multiple Radio Access Technologies (RATs) to meet the needs of these applications. Then, we propose a communication mode selection algorithm based on Deep Reinforcement Learning (DRL) to maximize the network's reliability while limiting resource consumption. Finally, we assess our work using the platooning scenario that requires high reliability. Numerical results reveal that the hybrid vehicular communication architecture has the potential to enhance the packet reception rate (PRR) by up to 30% compared to both the static RAT selection strategy and the multi-criteria decision-making (MCDM) selection algorithm. Additionally, it improves the efficiency of the redundant communication mode by 20% regarding resource consumption
Read more7/2/2024