AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments

0

Sign in to get full access
Overview
- This paper describes AquaMILR, an undulatory robot designed for navigation in cluttered aquatic environments.
- The robot's control system relies on "mechanical intelligence" - passive mechanical features that simplify control and enable agile maneuvering.
- Key innovations include a novel transmission system and flexible fin design that allow the robot to efficiently propel itself and navigate tight spaces.
Plain English Explanation
The researchers have developed a new type of underwater robot called AquaMILR that is inspired by the way fish and other marine animals move through the water. Instead of using complex electronic controls, AquaMILR relies on clever mechanical design to simplify how it is controlled.
The robot's body undulates back and forth like a snake or eel, which allows it to swim efficiently and navigate tight spaces. This undulating motion is enabled by a special transmission system that connects the robot's segments. The robot also has flexible fins that help it change direction and maneuver around obstacles.
By incorporating these mechanical intelligence features, the researchers were able to create an underwater robot that is highly agile and doesn't require complex, power-hungry electronic controls to operate. This could make AquaMILR well-suited for tasks like search and rescue operations in chaotic underwater environments.
Technical Explanation
The paper introduces AquaMILR, a biologically-inspired underwater robot designed for operation in cluttered, fluid environments. Unlike traditional underwater robots that rely on complex electronic control systems, AquaMILR uses a novel redundant mechanical transmission and flexible fin design to simplify control and enable agile maneuvering.
The robot's undulatory swimming motion is generated by a mechanical transmission that couples the movement of adjacent segments. This transmission system allows the robot to efficiently propel itself through the water using underactuated control - i.e., fewer actuators than degrees of freedom.
The robot's flexible fins also play a key role in its agility. By deforming in response to fluid forces, the fins enable the robot to rapidly change direction and navigate through cluttered environments. Experiments demonstrate AquaMILR's ability to quickly and efficiently swim through narrow gaps and around obstacles.
Critical Analysis
The paper provides a compelling demonstration of how mechanical intelligence can be leveraged to simplify the control of complex robotic systems. By incorporating passive mechanical features that exploit the dynamics of the environment, the researchers were able to create an agile underwater robot that does not require extensive electronic controls.
While the current prototype is tethered, the authors note that future work will focus on developing an untethered, self-powered version of AquaMILR. Challenges around onboard power and control systems will need to be addressed to enable fully autonomous operation.
Additionally, the paper does not provide a detailed analysis of the robot's energy efficiency or resilience to external disturbances. Further research would be needed to fully characterize the capabilities and limitations of this embodied design approach.
Conclusion
The AquaMILR project demonstrates how mechanical intelligence can be leveraged to create highly capable underwater robots that are simple to control. By incorporating passive mechanical features that exploit fluid dynamics, the researchers were able to develop a robot with impressive agility and maneuvering capabilities.
This approach could have significant implications for the design of search and rescue robots, biologically-inspired robotics, and other redundant, underactuated systems that must operate in challenging, unstructured environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments
Tianyu Wang, Nishanth Mankame, Matthew Fernandez, Velin Kojouharov, Daniel I. Goldman
While undulatory swimming of elongate limbless robots has been extensively studied in open hydrodynamic environments, less research has been focused on limbless locomotion in complex, cluttered aquatic environments. Motivated by the concept of mechanical intelligence, where controls for obstacle navigation can be offloaded to passive body mechanics in terrestrial limbless locomotion, we hypothesize that principles of mechanical intelligence can be extended to cluttered hydrodynamic regimes. To test this, we developed an untethered limbless robot capable of undulatory swimming on water surfaces, utilizing a bilateral cable-driven mechanism inspired by organismal muscle actuation morphology to achieve programmable anisotropic body compliance. We demonstrated through robophysical experiments that, similar to terrestrial locomotion, an appropriate level of body compliance can facilitate emergent swim through complex hydrodynamic environments under pure open-loop control. Moreover, we found that swimming performance depends on undulation frequency, with effective locomotion achieved only within a specific frequency range. This contrasts with highly damped terrestrial regimes, where inertial effects can often be neglected. Further, to enhance performance and address the challenges posed by nondeterministic obstacle distributions, we incorporated computational intelligence by developing a real-time body compliance tuning controller based on cable tension feedback. This controller improves the robot's robustness and overall speed in heterogeneous hydrodynamic environments.
Read more9/30/2024
👀
0
AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
Matthew Fernandez, Tianyu Wang, Galen Tunnicliffe, Donoven Dortilus, Peter Gunnarson, John O. Dabiri, Daniel I. Goldman
This paper presents AquaMILR+, an untethered limbless robot designed for agile navigation in complex aquatic environments. The robot features a bilateral actuation mechanism that models musculoskeletal actuation in many anguilliform swimming organisms which propagates a moving wave from head to tail allowing open fluid undulatory swimming. This actuation mechanism employs mechanical intelligence, enhancing the robot's maneuverability when interacting with obstacles. AquaMILR+ also includes a compact depth control system inspired by the swim bladder and lung structures of eels and sea snakes. The mechanism, driven by a syringe and telescoping leadscrew, enables depth and pitch control-capabilities that are difficult for most anguilliform swimming robots to achieve. Additional structures, such as fins and a tail, further improve stability and propulsion efficiency. Our tests in both open water and indoor 2D and 3D heterogeneous aquatic environments highlight AquaMILR+'s capabilities and suggest a promising system for complex underwater tasks such as search and rescue and deep-sea exploration.
Read more9/30/2024
📶
0
Highly agile flat swimming robot
Florian Hartmann, Mrudhula Baskaran, Gaetan Raynaud, Mehdi Benbedda, Karen Mulleners, Herbert Shea
Exploring bodies of water on their surface allows robots to efficiently communicate and harvest energy from the sun. On the water surface, however, robots often face highly unstructured environments, cluttered with plant matter, animals, and debris. We report a fast (5.1 cm/s translation and 195 {deg}/s rotation), centimeter-scale swimming robot with high maneuverability and autonomous untethered operation. Locomotion is enabled by a pair of soft, millimeter-thin, undulating pectoral fins, in which traveling waves are electrically excited to generate propulsion. The robots navigate through narrow spaces, through grassy plants, and push objects weighing over 16x their body weight. Such robots can allow distributed environmental monitoring as well as continuous measurement of plant and water parameters for aqua-farming.
Read more6/13/2024
0
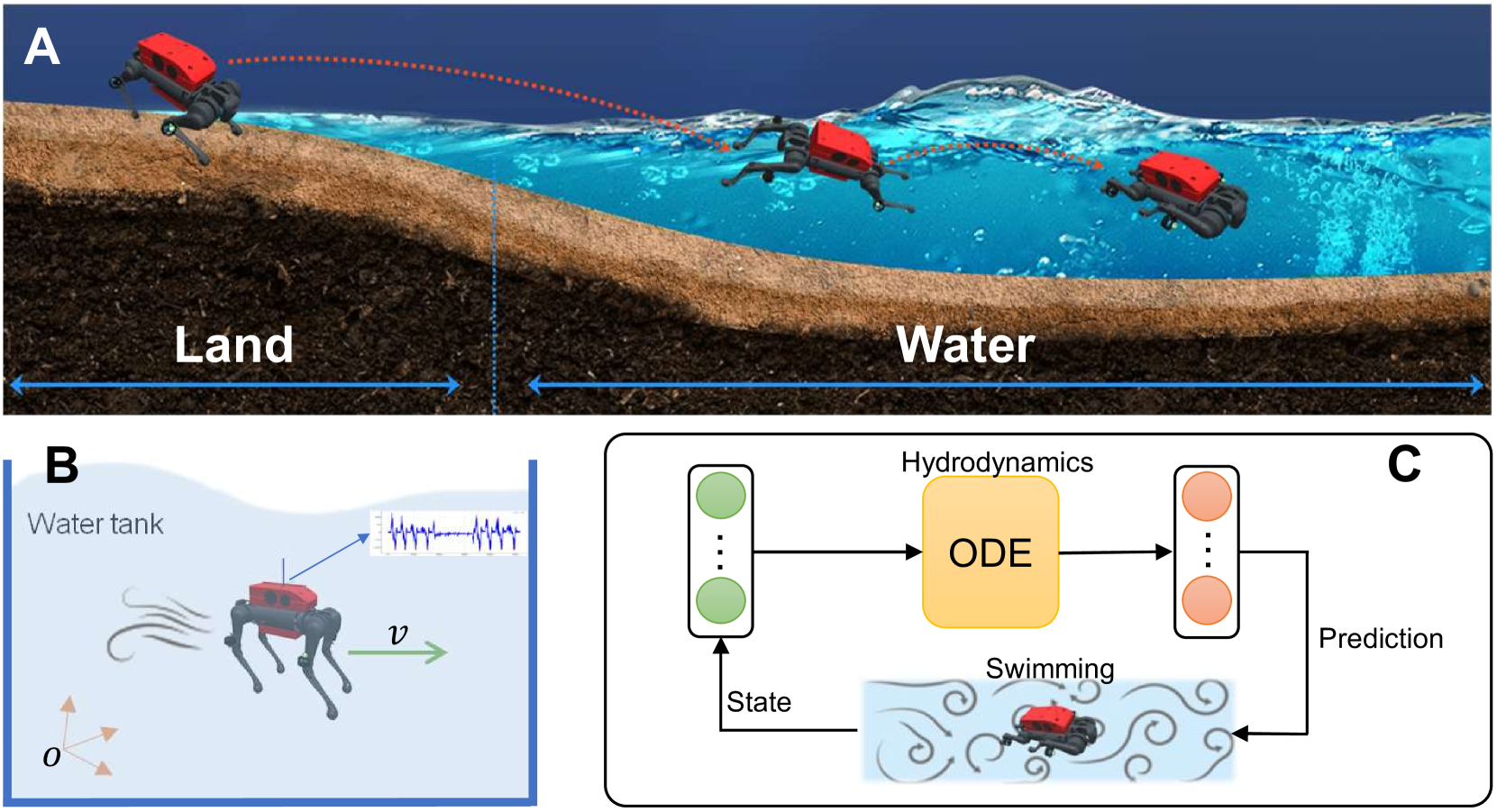
New!Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions
Cong Wang, Aoming Liang, Fei Han, Xinyu Zeng, Zhibin Li, Dixia Fan, Jens Kober
Reinforcement learning-based quadruped robots excel across various terrains but still lack the ability to swim in water due to the complex underwater environment. This paper presents the development and evaluation of a data-driven hydrodynamic model for amphibious quadruped robots, aiming to enhance their adaptive capabilities in complex and dynamic underwater environments. The proposed model leverages Neural Ordinary Differential Equations (ODEs) combined with attention mechanisms to accurately process and interpret real-time sensor data. The model enables the quadruped robots to understand and predict complex environmental patterns, facilitating robust decision-making strategies. We harness real-time sensor data, capturing various environmental and internal state parameters to train and evaluate our model. A significant focus of our evaluation involves testing the quadruped robot's performance across different hydrodynamic conditions and assessing its capabilities at varying speeds and fluid dynamic conditions. The outcomes suggest that the model can effectively learn and adapt to varying conditions, enabling the prediction of force states and enhancing autonomous robotic behaviors in various practical scenarios.
Read more10/2/2024