Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions

0
Sign in to get full access
Overview
- The paper focuses on learning adaptive hydrodynamic models using neural ordinary differential equations (ODEs) in complex conditions.
- The researchers aim to develop a method that can accurately model fluid dynamics and adapt to changing environmental conditions.
- The technique could have applications in areas like robotics, simulation, and scientific computing.
Plain English Explanation
The researchers in this paper are working on a way to better model fluid dynamics using a type of machine learning model called a neural ODE. Fluid dynamics is the study of how fluids like water and air move, and it's an important field for things like designing ships, robots that swim, and simulating weather.
The key idea is to use a neural network to learn a mathematical model that can accurately predict how a fluid will behave, even in complex or changing conditions. This is challenging because fluids can behave in very intricate ways, but the neural ODE approach allows the model to adapt and refine itself as it encounters new situations.
By leveraging neural networks, the researchers hope to create a more flexible and accurate hydrodynamic model that can be used in a wide range of applications, from autonomous underwater vehicles to computer simulations of fluid flow. The ultimate goal is to develop better tools for understanding and predicting the behavior of fluids in the real world.
Technical Explanation
The core of the researchers' approach is a neural ODE, which is a type of machine learning model that can learn a continuous-time dynamical system. In this case, the dynamical system represents the fluid dynamics governing the motion of a fluid.
The neural ODE is trained on data describing the fluid flow, which could come from physical experiments, computational fluid dynamics simulations, or other sources. As the model encounters new situations, it can adapt its internal parameters to better fit the observed behavior, allowing it to learn complex, nonlinear relationships in the data.
To handle the challenging task of modeling fluid dynamics in diverse conditions, the researchers incorporate several key innovations:
- Adaptive Parameterization: The neural ODE model has parameters that can change based on the current state of the fluid, enabling it to adapt to different flow regimes and environmental conditions.
- Multi-Scale Modeling: The model operates on multiple spatial and temporal scales, allowing it to capture both large-scale and fine-grained fluid behavior.
- Transfer Learning: The researchers leverage transfer learning techniques to apply knowledge gained from simpler fluid flow problems to more complex scenarios, improving sample efficiency.
Through extensive experiments, the researchers demonstrate that their neural ODE-based approach can outperform traditional computational fluid dynamics methods in terms of accuracy and generalization to new conditions. The technique shows promise for applications in robotics and scientific computing where accurate, adaptive fluid models are essential.
Critical Analysis
The paper presents a compelling approach to learning adaptive hydrodynamic models using neural ODEs, but it also highlights some potential limitations and areas for further research:
- Data Requirements: The method relies on having access to high-quality training data describing fluid dynamics, which may not always be available, especially for complex real-world scenarios.
- Computational Complexity: Solving the neural ODE can be computationally intensive, particularly for large-scale problems, which may limit its practicality in some applications.
- Interpretability: As with many deep learning models, the internal workings of the neural ODE can be difficult to interpret, which could hinder understanding and trust in the model's predictions.
Additionally, the paper does not address how the technique would scale to three-dimensional fluid flow problems or handle turbulence, which are crucial considerations for many real-world applications. Further research and validation on a broader range of fluid dynamics problems would help solidify the method's capabilities and limitations.
Conclusion
This paper presents a novel approach to learning adaptive hydrodynamic models using neural ODEs, which could have significant implications for fields like robotics, simulation, and scientific computing. By leveraging the flexibility and learning capabilities of neural networks, the researchers have developed a technique that can potentially outperform traditional computational fluid dynamics methods in terms of accuracy and generalization.
While the method shows promise, there are still some challenges to overcome, particularly around data requirements, computational complexity, and model interpretability. Nonetheless, this research represents an important step forward in the pursuit of more accurate and adaptable fluid dynamics models, which could lead to advancements in a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions
Cong Wang, Aoming Liang, Fei Han, Xinyu Zeng, Zhibin Li, Dixia Fan, Jens Kober
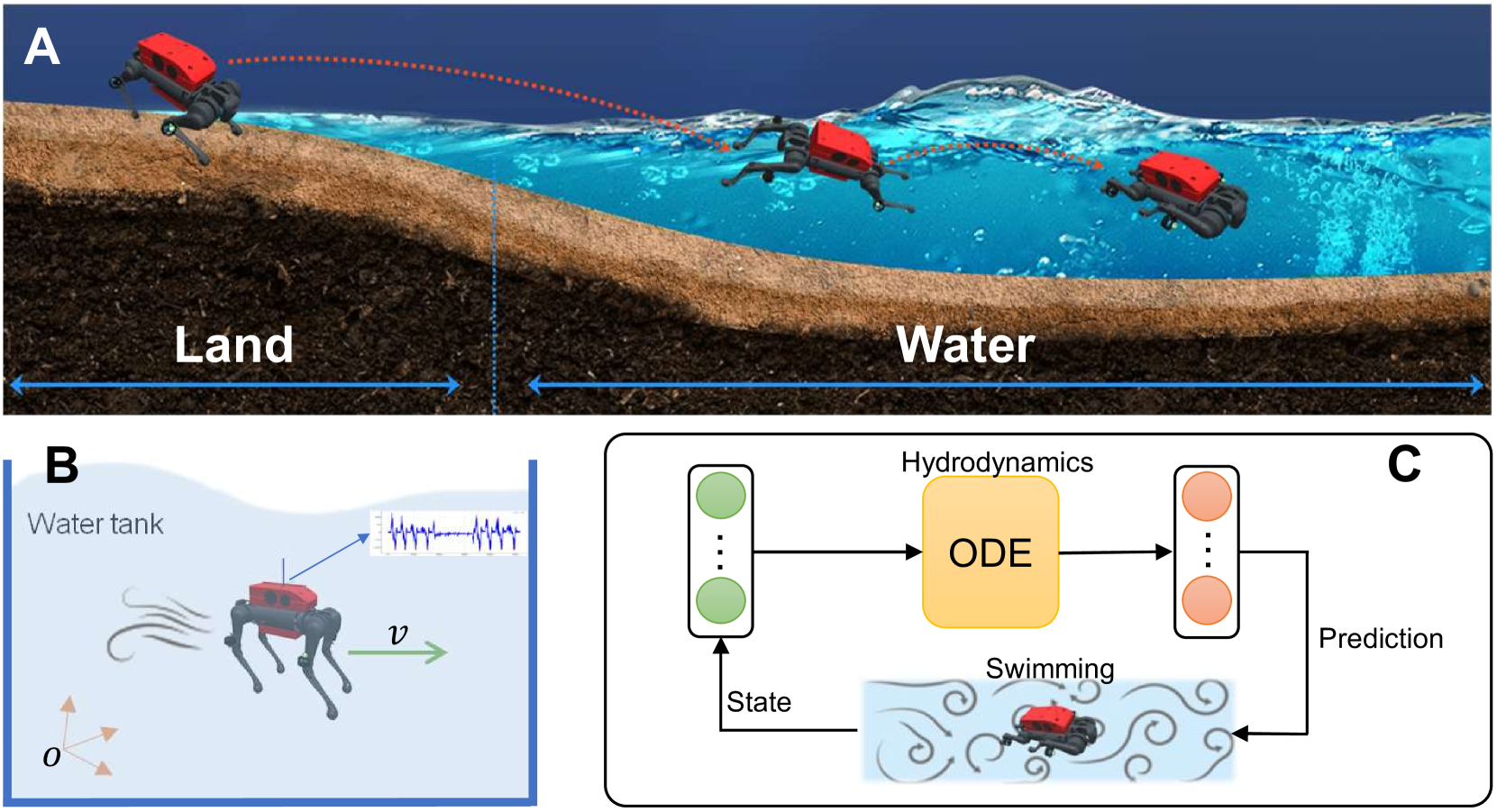
Reinforcement learning-based quadruped robots excel across various terrains but still lack the ability to swim in water due to the complex underwater environment. This paper presents the development and evaluation of a data-driven hydrodynamic model for amphibious quadruped robots, aiming to enhance their adaptive capabilities in complex and dynamic underwater environments. The proposed model leverages Neural Ordinary Differential Equations (ODEs) combined with attention mechanisms to accurately process and interpret real-time sensor data. The model enables the quadruped robots to understand and predict complex environmental patterns, facilitating robust decision-making strategies. We harness real-time sensor data, capturing various environmental and internal state parameters to train and evaluate our model. A significant focus of our evaluation involves testing the quadruped robot's performance across different hydrodynamic conditions and assessing its capabilities at varying speeds and fluid dynamic conditions. The outcomes suggest that the model can effectively learn and adapt to varying conditions, enabling the prediction of force states and enhancing autonomous robotic behaviors in various practical scenarios.
Read more10/2/2024

0
AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments
Tianyu Wang, Nishanth Mankame, Matthew Fernandez, Velin Kojouharov, Daniel I. Goldman
While undulatory swimming of elongate limbless robots has been extensively studied in open hydrodynamic environments, less research has been focused on limbless locomotion in complex, cluttered aquatic environments. Motivated by the concept of mechanical intelligence, where controls for obstacle navigation can be offloaded to passive body mechanics in terrestrial limbless locomotion, we hypothesize that principles of mechanical intelligence can be extended to cluttered hydrodynamic regimes. To test this, we developed an untethered limbless robot capable of undulatory swimming on water surfaces, utilizing a bilateral cable-driven mechanism inspired by organismal muscle actuation morphology to achieve programmable anisotropic body compliance. We demonstrated through robophysical experiments that, similar to terrestrial locomotion, an appropriate level of body compliance can facilitate emergent swim through complex hydrodynamic environments under pure open-loop control. Moreover, we found that swimming performance depends on undulation frequency, with effective locomotion achieved only within a specific frequency range. This contrasts with highly damped terrestrial regimes, where inertial effects can often be neglected. Further, to enhance performance and address the challenges posed by nondeterministic obstacle distributions, we incorporated computational intelligence by developing a real-time body compliance tuning controller based on cable tension feedback. This controller improves the robot's robustness and overall speed in heterogeneous hydrodynamic environments.
Read more9/30/2024

0
Knowledge-based Neural Ordinary Differential Equations for Cosserat Rod-based Soft Robots
Tom Z. Jiahao, Ryan Adolf, Cynthia Sung, M. Ani Hsieh
Soft robots have many advantages over rigid robots thanks to their compliant and passive nature. However, it is generally challenging to model the dynamics of soft robots due to their high spatial dimensionality, making it difficult to use model-based methods to accurately control soft robots. It often requires direct numerical simulation of partial differential equations to simulate soft robots. This not only requires an accurate numerical model, but also makes soft robot modeling slow and expensive. Deep learning algorithms have shown promises in data-driven modeling of soft robots. However, these algorithms usually require a large amount of data, which are difficult to obtain in either simulation or real-world experiments of soft robots. In this work, we propose KNODE-Cosserat, a framework that combines first-principle physics models and neural ordinary differential equations. We leverage the best from both worlds -- the generalization ability of physics-based models and the fast speed of deep learning methods. We validate our framework in both simulation and real-world experiments. In both cases, we show that the robot model significantly improves over the baseline models under different metrics.
Read more9/26/2024

0
Aquatic Navigation: A Challenging Benchmark for Deep Reinforcement Learning
Davide Corsi, Davide Camponogara, Alessandro Farinelli
An exciting and promising frontier for Deep Reinforcement Learning (DRL) is its application to real-world robotic systems. While modern DRL approaches achieved remarkable successes in many robotic scenarios (including mobile robotics, surgical assistance, and autonomous driving) unpredictable and non-stationary environments can pose critical challenges to such methods. These features can significantly undermine fundamental requirements for a successful training process, such as the Markovian properties of the transition model. To address this challenge, we propose a new benchmarking environment for aquatic navigation using recent advances in the integration between game engines and DRL. In more detail, we show that our benchmarking environment is problematic even for state-of-the-art DRL approaches that may struggle to generate reliable policies in terms of generalization power and safety. Specifically, we focus on PPO, one of the most widely accepted algorithms, and we propose advanced training techniques (such as curriculum learning and learnable hyperparameters). Our extensive empirical evaluation shows that a well-designed combination of these ingredients can achieve promising results. Our simulation environment and training baselines are freely available to facilitate further research on this open problem and encourage collaboration in the field.
Read more6/3/2024