AssistantX: An LLM-Powered Proactive Assistant in Collaborative Human-Populated Environment

0

Sign in to get full access
Overview
- This paper introduces AssistantX, an AI-powered proactive assistant designed to collaborate with humans in a shared environment.
- AssistantX leverages large language models (LLMs) to engage in natural conversations, understand context, and provide relevant assistance.
- The assistant aims to anticipate user needs, offer timely support, and facilitate collaborative tasks in a human-populated setting.
Plain English Explanation
The researchers developed an AI assistant called AssistantX that is designed to work alongside humans in a shared environment. AssistantX uses advanced language models to engage in natural conversations, understand the context of a situation, and provide helpful assistance when needed.
The key idea behind AssistantX is to create an AI that can anticipate what users might need and proactively offer support, rather than waiting to be asked. For example, if the assistant notices that a user is struggling with a task, it could automatically provide relevant information or suggestions to help them. The goal is to make the collaboration between humans and the AI assistant seamless and productive.
By leveraging the capabilities of large language models, AssistantX can understand the nuances of human communication and adapt its responses accordingly. This allows the assistant to engage in more natural, contextual interactions compared to traditional task-oriented chatbots.
The researchers envision AssistantX being useful in a variety of settings, such as office environments, educational institutions, or even smart homes, where it can assist users with a wide range of tasks and help facilitate collaborative work.
Technical Explanation
The paper describes the design and implementation of AssistantX, an AI-powered proactive assistant that is intended to collaborate with humans in a shared environment. The key components of the AssistantX system include:
-
Large Language Model (LLM): At the core of AssistantX is a powerful large language model that enables natural language understanding and generation. This allows the assistant to engage in flexible, contextual conversations with users.
-
Proactive Monitoring and Anticipation: AssistantX continuously monitors the environment and user activities, using machine learning techniques to anticipate user needs and proactively offer relevant assistance. This includes detecting when a user might be struggling with a task and providing timely support.
-
Multimodal Interaction: The assistant can receive and process various input modalities, such as text, voice, and visual information, allowing for more natural and intuitive interactions with users.
-
Collaborative Task Support: AssistantX is designed to facilitate collaborative tasks by understanding the overall context, dividing up responsibilities, and coordinating with multiple users to achieve shared goals.
-
Dynamic Knowledge Acquisition: The system is capable of dynamically acquiring new knowledge and skills through interactions with users, allowing it to continuously expand its capabilities and provide more tailored assistance over time.
The researchers evaluated the performance of AssistantX in a series of user studies, demonstrating its ability to effectively collaborate with humans on various tasks and provide valuable assistance in a shared environment. The results highlight the potential of LLM-powered proactive assistants to enhance human-AI collaboration and improve productivity in real-world settings.
Critical Analysis
The paper presents a compelling vision for an AI-powered assistant that can proactively engage with users and facilitate collaborative tasks. However, the research also acknowledges several potential challenges and limitations:
-
Contextual Understanding: While the LLM-based approach allows for more natural language interactions, the assistant's ability to fully understand complex, nuanced contexts may still be limited. Ensuring robust contextual awareness remains an ongoing challenge in AI development.
-
User Trust and Acceptance: For AssistantX to be widely adopted, users must be comfortable with the assistant's proactive nature and trust its capabilities. Building appropriate levels of transparency and user control will be crucial for user acceptance.
-
Privacy and Ethical Considerations: The constant monitoring of user activities and the assistant's access to potentially sensitive information raises important privacy and ethical concerns that must be carefully addressed.
-
Scalability and Deployment: Deploying and maintaining a system like AssistantX in large-scale, real-world environments may present significant technical and logistical challenges that the paper does not fully explore.
Overall, the research demonstrates the potential of LLM-powered proactive assistants to enhance human-AI collaboration, but further work is needed to address the practical and ethical considerations surrounding the deployment of such systems in complex, dynamic environments.
Conclusion
This paper introduces AssistantX, an AI-powered proactive assistant designed to collaborate with humans in shared environments. By leveraging large language models and advanced monitoring capabilities, AssistantX aims to anticipate user needs, offer timely support, and facilitate collaborative tasks in a seamless and productive manner.
The key innovation of AssistantX is its ability to engage in natural, context-aware interactions, going beyond traditional task-oriented chatbots. This approach holds promise for improving productivity and enhancing human-AI collaboration in a variety of settings, such as offices, educational institutions, and smart homes.
While the research presents a compelling vision, it also highlights the need to address challenges related to contextual understanding, user trust, privacy, and scalability. Continued advancements in these areas will be crucial for the successful deployment and widespread adoption of AI assistants like AssistantX in real-world collaborative environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AssistantX: An LLM-Powered Proactive Assistant in Collaborative Human-Populated Environment
Nan Sun, Bo Mao, Yongchang Li, Lumeng Ma, Di Guo, Huaping Liu
The increasing demand for intelligent assistants in human-populated environments has motivated significant research in autonomous robotic systems. Traditional service robots and virtual assistants, however, struggle with real-world task execution due to their limited capacity for dynamic reasoning and interaction, particularly when human collaboration is required. Recent developments in Large Language Models have opened new avenues for improving these systems, enabling more sophisticated reasoning and natural interaction capabilities. In this paper, we introduce AssistantX, an LLM-powered proactive assistant designed to operate autonomously in a physical office environment. Unlike conventional service robots, AssistantX leverages a novel multi-agent architecture, PPDR4X, which provides advanced inference capabilities and comprehensive collaboration awareness. By effectively bridging the gap between virtual operations and physical interactions, AssistantX demonstrates robust performance in managing complex real-world scenarios. Our evaluation highlights the architecture's effectiveness, showing that AssistantX can respond to clear instructions, actively retrieve supplementary information from memory, and proactively seek collaboration from team members to ensure successful task completion. More details and videos can be found at https://assistantx-agent.github.io/AssistantX/.
Read more9/27/2024
0
PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations
Ehsan Latif, Ramviyas Parasuraman, Xiaoming Zhai
Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is the same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p < 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p < 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education.
Read more6/5/2024
0
Experiential Co-Learning of Software-Developing Agents
Chen Qian, Yufan Dang, Jiahao Li, Wei Liu, Zihao Xie, Yifei Wang, Weize Chen, Cheng Yang, Xin Cong, Xiaoyin Che, Zhiyuan Liu, Maosong Sun
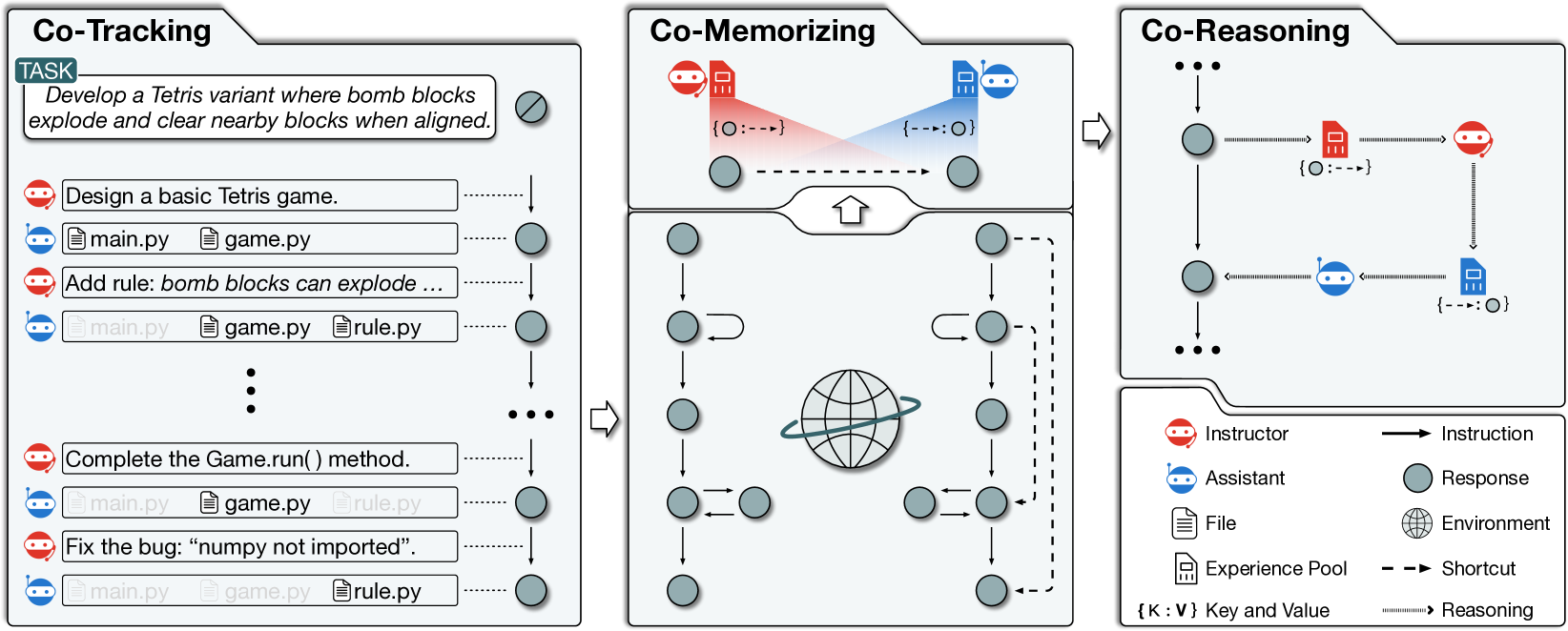
Recent advancements in large language models (LLMs) have brought significant changes to various domains, especially through LLM-driven autonomous agents. A representative scenario is in software development, where LLM agents demonstrate efficient collaboration, task division, and assurance of software quality, markedly reducing the need for manual involvement. However, these agents frequently perform a variety of tasks independently, without benefiting from past experiences, which leads to repeated mistakes and inefficient attempts in multi-step task execution. To this end, we introduce Experiential Co-Learning, a novel LLM-agent learning framework in which instructor and assistant agents gather shortcut-oriented experiences from their historical trajectories and use these past experiences for future task execution. The extensive experiments demonstrate that the framework enables agents to tackle unseen software-developing tasks more effectively. We anticipate that our insights will guide LLM agents towards enhanced autonomy and contribute to their evolutionary growth in cooperative learning. The code and data are available at https://github.com/OpenBMB/ChatDev.
Read more6/6/2024
🏋️
0
Autonomous Workflow for Multimodal Fine-Grained Training Assistants Towards Mixed Reality
Jiahuan Pei, Irene Viola, Haochen Huang, Junxiao Wang, Moonisa Ahsan, Fanghua Ye, Jiang Yiming, Yao Sai, Di Wang, Zhumin Chen, Pengjie Ren, Pablo Cesar
Autonomous artificial intelligence (AI) agents have emerged as promising protocols for automatically understanding the language-based environment, particularly with the exponential development of large language models (LLMs). However, a fine-grained, comprehensive understanding of multimodal environments remains under-explored. This work designs an autonomous workflow tailored for integrating AI agents seamlessly into extended reality (XR) applications for fine-grained training. We present a demonstration of a multimodal fine-grained training assistant for LEGO brick assembly in a pilot XR environment. Specifically, we design a cerebral language agent that integrates LLM with memory, planning, and interaction with XR tools and a vision-language agent, enabling agents to decide their actions based on past experiences. Furthermore, we introduce LEGO-MRTA, a multimodal fine-grained assembly dialogue dataset synthesized automatically in the workflow served by a commercial LLM. This dataset comprises multimodal instruction manuals, conversations, XR responses, and vision question answering. Last, we present several prevailing open-resource LLMs as benchmarks, assessing their performance with and without fine-tuning on the proposed dataset. We anticipate that the broader impact of this workflow will advance the development of smarter assistants for seamless user interaction in XR environments, fostering research in both AI and HCI communities.
Read more6/7/2024