PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations

0
Sign in to get full access
Overview
- Introduces an interactive learning robot called "PhysicsAssistant" that uses a large language model (LLM) to assist with physics lab investigations
- Focuses on integrating the LLM with object detection and robotic control capabilities to create an engaging and educational physics learning experience
- Explores how the system can help students at different levels of Bloom's Taxonomy, from remembering facts to evaluating and creating new physics-based solutions
Plain English Explanation
The "PhysicsAssistant" is a robot that is designed to help students learn physics in a hands-on, interactive way. It uses a powerful large language model to understand and respond to students' questions and commands. The robot can also detect and interact with physical objects, allowing it to guide students through experiments and simulations.
The key idea behind the PhysicsAssistant is to create an engaging learning experience that can adapt to the student's level of understanding. By integrating the language model with object detection and robotic control, the system can support students as they work through different levels of Bloom's Taxonomy, from simply remembering physics concepts to higher-order skills like evaluating and creating new physics-based solutions.
For example, the robot could help a student set up an experiment, provide explanations and guidance as they conduct the experiment, and then assist them in analyzing the results and drawing conclusions. The multimodal nature of the system allows it to blend physical and digital interactions, making the learning experience more engaging and effective.
Technical Explanation
The PhysicsAssistant system integrates several key components to create its interactive learning experience:
-
Large Language Model: The system uses a powerful large language model to understand and respond to natural language inputs from students. This allows the robot to engage in dialogue, answer questions, and provide explanations.
-
Object Detection: The robot is equipped with computer vision capabilities that enable it to detect and interact with physical objects in the environment. This allows the system to guide students through experiments and simulations, providing hands-on learning experiences.
-
Robotic Control: The PhysicsAssistant has the ability to manipulate and control physical devices, such as lab equipment or simulation tools. This allows the system to demonstrate experiments, set up scenarios, and guide students through the learning process.
-
Bloom's Taxonomy Integration: The researchers designed the system to support different levels of Bloom's Taxonomy, from remembering facts to evaluating and creating new physics-based solutions. This allows the PhysicsAssistant to adapt to the student's level of understanding and provide appropriate guidance and support.
The multimodal nature of the system, which combines language, vision, and physical interaction, is a key aspect of the PhysicsAssistant's design. This allows the robot to create a more engaging and effective learning experience, as it can blend digital and physical interactions to support students' understanding of physics concepts.
Critical Analysis
The PhysicsAssistant project presents an interesting and promising approach to using large language models and robotics to enhance physics education. However, there are a few potential limitations and areas for further research:
-
Scalability and Deployment: The paper does not provide details on the scalability of the system or its potential for real-world deployment in educational settings. Integrating the PhysicsAssistant into existing curricula and infrastructure may present challenges that need to be addressed.
-
Evaluation and Validation: The paper does not include a comprehensive evaluation of the system's effectiveness in improving student learning outcomes. More research is needed to assess the PhysicsAssistant's impact on student engagement, knowledge retention, and problem-solving skills.
-
Generalizability: While the paper focuses on physics education, the underlying multimodal approach could potentially be applied to other academic domains. Exploring the transferability of the PhysicsAssistant's design principles to other subjects could broaden its potential impact.
Overall, the PhysicsAssistant project represents an exciting step forward in the integration of large language models, computer vision, and robotics to create engaging and effective learning experiences. As the field of educational AI continues to evolve, research like this will be crucial in shaping the future of interactive learning tools.
Conclusion
The PhysicsAssistant is a novel interactive learning robot that uses a large language model, object detection, and robotic control to create an engaging and educational physics learning experience. By integrating these technologies and aligning the system's capabilities with Bloom's Taxonomy, the researchers have developed a platform that can adapt to students' varying levels of understanding and provide tailored support.
While the paper raises some questions about scalability, evaluation, and generalizability, the PhysicsAssistant project represents an important step forward in the field of educational AI. As technology continues to advance, tools like this have the potential to transform the way we approach physics education and learning in general, making it more interactive, personalized, and effective.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PhysicsAssistant: An LLM-Powered Interactive Learning Robot for Physics Lab Investigations
Ehsan Latif, Ramviyas Parasuraman, Xiaoming Zhai
Robot systems in education can leverage Large language models' (LLMs) natural language understanding capabilities to provide assistance and facilitate learning. This paper proposes a multimodal interactive robot (PhysicsAssistant) built on YOLOv8 object detection, cameras, speech recognition, and chatbot using LLM to provide assistance to students' physics labs. We conduct a user study on ten 8th-grade students to empirically evaluate the performance of PhysicsAssistant with a human expert. The Expert rates the assistants' responses to student queries on a 0-4 scale based on Bloom's taxonomy to provide educational support. We have compared the performance of PhysicsAssistant (YOLOv8+GPT-3.5-turbo) with GPT-4 and found that the human expert rating of both systems for factual understanding is the same. However, the rating of GPT-4 for conceptual and procedural knowledge (3 and 3.2 vs 2.2 and 2.6, respectively) is significantly higher than PhysicsAssistant (p < 0.05). However, the response time of GPT-4 is significantly higher than PhysicsAssistant (3.54 vs 1.64 sec, p < 0.05). Hence, despite the relatively lower response quality of PhysicsAssistant than GPT-4, it has shown potential for being used as a real-time lab assistant to provide timely responses and can offload teachers' labor to assist with repetitive tasks. To the best of our knowledge, this is the first attempt to build such an interactive multimodal robotic assistant for K-12 science (physics) education.
Read more6/5/2024
💬
0
Beyond Answers: Large Language Model-Powered Tutoring System in Physics Education for Deep Learning and Precise Understanding
Zhoumingju Jiang, Mengjun Jiang
The integration of artificial intelligence (AI) in education has shown significant promise, yet the effective personalization of learning, particularly in physics education, remains a challenge. This paper proposes Physics-STAR, a framework for large language model (LLM)- powered tutoring system designed to address this gap by providing personalized and adaptive learning experiences for high school students. Our study evaluates Physics-STAR against traditional teacher-led lectures and generic LLM tutoring through a controlled experiment with 12 high school sophomores. Results showed that Physics-STAR increased students' average scores and efficiency on conceptual, computational, and on informational questions. In particular, students' average scores on complex information problems increased by 100% and their efficiency increased by 5.95%. By facilitating step-by-step guidance and reflective learning, Physics-STAR helps students develop critical thinking skills and a robust comprehension of abstract concepts. The findings underscore the potential of AI-driven personalized tutoring systems to transform physics education. As LLM continues to advance, the future of student-centered AI in education looks promising, with the potential to significantly improve learning outcomes and efficiency.
Read more6/18/2024
0
VoicePilot: Harnessing LLMs as Speech Interfaces for Physically Assistive Robots
Akhil Padmanabha, Jessie Yuan, Janavi Gupta, Zulekha Karachiwalla, Carmel Majidi, Henny Admoni, Zackory Erickson
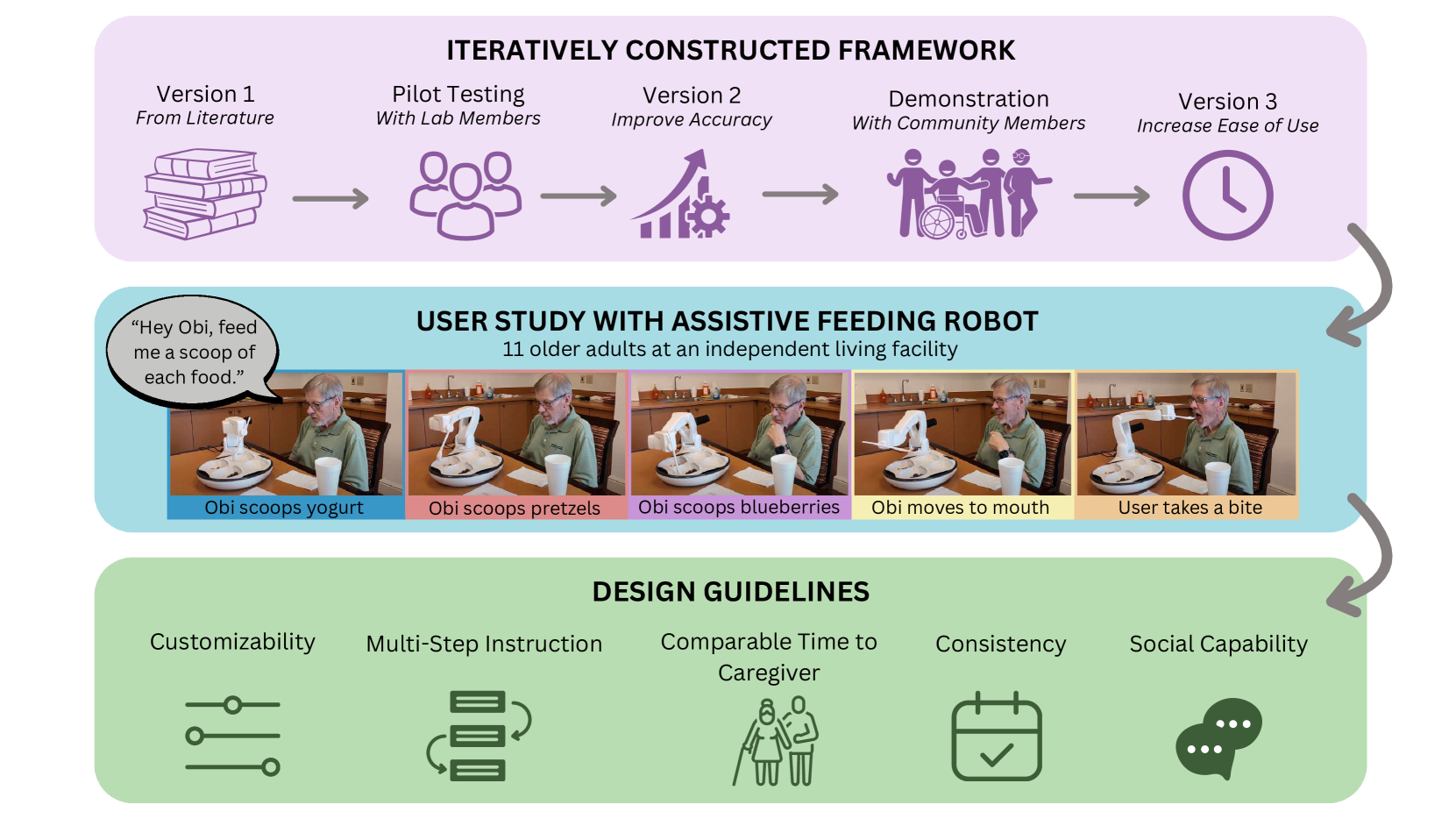
Physically assistive robots present an opportunity to significantly increase the well-being and independence of individuals with motor impairments or other forms of disability who are unable to complete activities of daily living. Speech interfaces, especially ones that utilize Large Language Models (LLMs), can enable individuals to effectively and naturally communicate high-level commands and nuanced preferences to robots. Frameworks for integrating LLMs as interfaces to robots for high level task planning and code generation have been proposed, but fail to incorporate human-centric considerations which are essential while developing assistive interfaces. In this work, we present a framework for incorporating LLMs as speech interfaces for physically assistive robots, constructed iteratively with 3 stages of testing involving a feeding robot, culminating in an evaluation with 11 older adults at an independent living facility. We use both quantitative and qualitative data from the final study to validate our framework and additionally provide design guidelines for using LLMs as speech interfaces for assistive robots. Videos and supporting files are located on our project website: https://sites.google.com/andrew.cmu.edu/voicepilot/
Read more7/18/2024

0
AssistantX: An LLM-Powered Proactive Assistant in Collaborative Human-Populated Environment
Nan Sun, Bo Mao, Yongchang Li, Lumeng Ma, Di Guo, Huaping Liu
The increasing demand for intelligent assistants in human-populated environments has motivated significant research in autonomous robotic systems. Traditional service robots and virtual assistants, however, struggle with real-world task execution due to their limited capacity for dynamic reasoning and interaction, particularly when human collaboration is required. Recent developments in Large Language Models have opened new avenues for improving these systems, enabling more sophisticated reasoning and natural interaction capabilities. In this paper, we introduce AssistantX, an LLM-powered proactive assistant designed to operate autonomously in a physical office environment. Unlike conventional service robots, AssistantX leverages a novel multi-agent architecture, PPDR4X, which provides advanced inference capabilities and comprehensive collaboration awareness. By effectively bridging the gap between virtual operations and physical interactions, AssistantX demonstrates robust performance in managing complex real-world scenarios. Our evaluation highlights the architecture's effectiveness, showing that AssistantX can respond to clear instructions, actively retrieve supplementary information from memory, and proactively seek collaboration from team members to ensure successful task completion. More details and videos can be found at https://assistantx-agent.github.io/AssistantX/.
Read more9/27/2024