Asynchronous Large Language Model Enhanced Planner for Autonomous Driving
2406.14556
0
0
Abstract
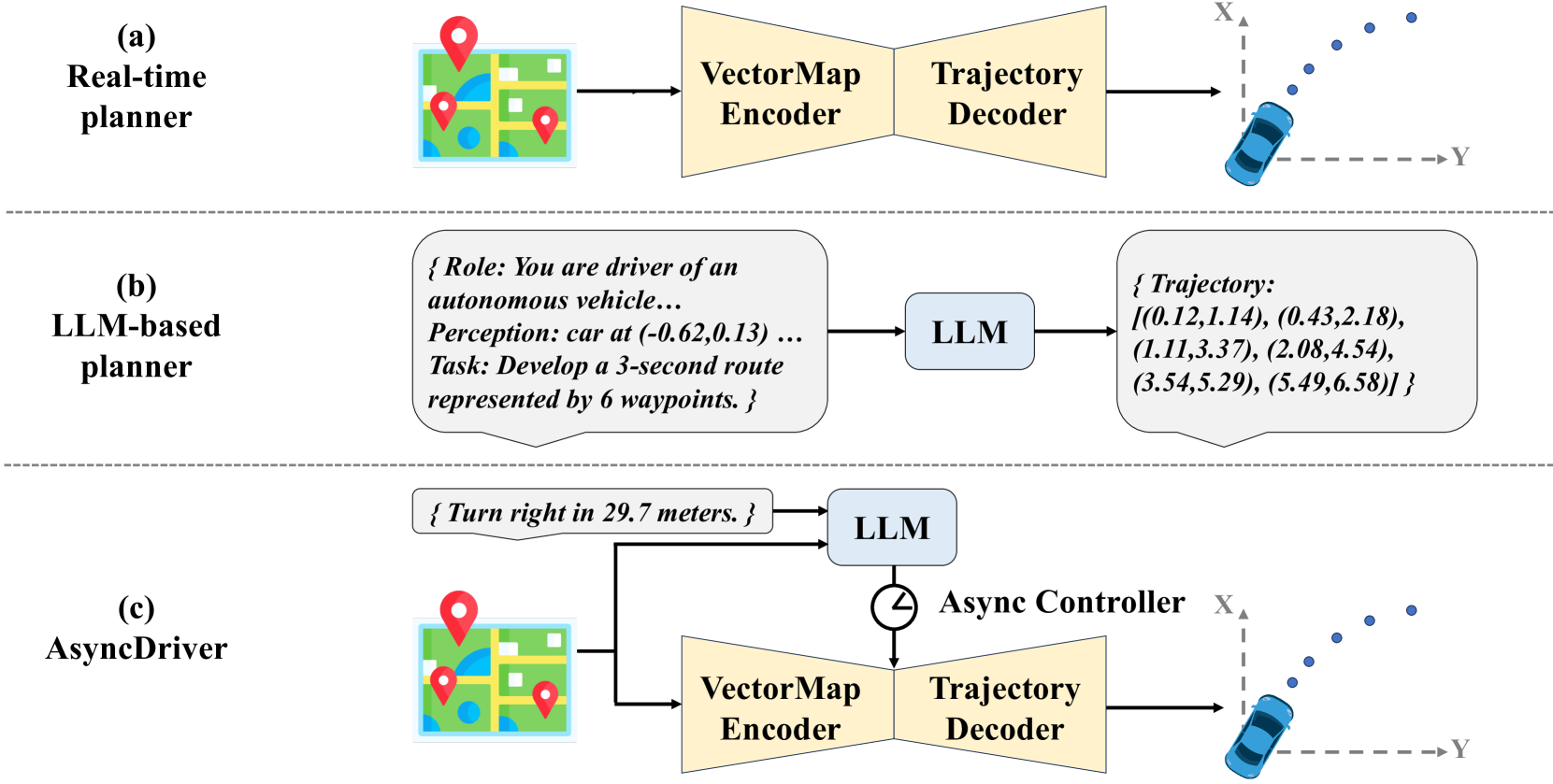
Despite real-time planners exhibiting remarkable performance in autonomous driving, the growing exploration of Large Language Models (LLMs) has opened avenues for enhancing the interpretability and controllability of motion planning. Nevertheless, LLM-based planners continue to encounter significant challenges, including elevated resource consumption and extended inference times, which pose substantial obstacles to practical deployment. In light of these challenges, we introduce AsyncDriver, a new asynchronous LLM-enhanced closed-loop framework designed to leverage scene-associated instruction features produced by LLM to guide real-time planners in making precise and controllable trajectory predictions. On one hand, our method highlights the prowess of LLMs in comprehending and reasoning with vectorized scene data and a series of routing instructions, demonstrating its effective assistance to real-time planners. On the other hand, the proposed framework decouples the inference processes of the LLM and real-time planners. By capitalizing on the asynchronous nature of their inference frequencies, our approach have successfully reduced the computational cost introduced by LLM, while maintaining comparable performance. Experiments show that our approach achieves superior closed-loop evaluation performance on nuPlan's challenging scenarios.
Create account to get full access
Overview
- This paper presents an asynchronous large language model enhanced planner for autonomous driving.
- The system uses a large language model to generate plans for autonomous vehicles in a more flexible and scalable way compared to traditional planning approaches.
- The authors demonstrate the system's effectiveness on various driving scenarios and show that it can outperform rule-based and learning-based baselines.
Plain English Explanation
The researchers have developed a new system for planning the movements of self-driving cars. Instead of relying solely on traditional planning algorithms, their approach incorporates a large language model - a powerful AI system trained on a vast amount of text data. This allows the system to generate plans for the car in a more flexible and adaptable way, rather than being limited to a fixed set of rules.
The key insight is that the language model can reason about driving situations and actions in a more human-like way, drawing on its broad knowledge to make decisions. For example, it can understand contextual information about the road, traffic, and driver preferences to determine the best course of action. This can lead to more natural and responsive driving behavior compared to rigid, rule-based approaches.
The researchers tested their system on a variety of driving scenarios and found that it performed better than other state-of-the-art planning methods. This suggests that incorporating large language models could be a promising direction for improving the capabilities of self-driving cars, making them more adaptable and better able to handle the complexities of the real world.
Technical Explanation
The core of the system is an asynchronous planning framework that leverages a large language model to generate driving plans. The language model is trained on a diverse corpus of text data, allowing it to develop a broad understanding of the world that can be applied to the driving domain.
During the planning process, the system first perceives the current driving environment using sensor data. It then uses the language model to generate a sequence of actions that the vehicle should take to navigate the situation safely and efficiently. This generation process is asynchronous, meaning the language model can operate independently of the rest of the planning pipeline, enabling more efficient and scalable computation.
The authors evaluated their system on a range of simulated driving scenarios, including highway merging, intersections, and pedestrian interactions. They compared its performance to both rule-based and learning-based planning baselines, and found that the language model-enhanced approach outperformed these alternatives across various metrics like safety, efficiency, and smoothness of driving.
Critical Analysis
One potential limitation of the approach is that it relies on the language model's ability to accurately understand and reason about the driving context. If the model's knowledge is incomplete or biased, it could lead to suboptimal or unsafe planning decisions. The authors acknowledge this concern and suggest that further research is needed to better understand the failure modes and robustness of large language models in safety-critical applications like autonomous driving.
Additionally, the system's reliance on the language model introduces new challenges in terms of interpretability and explainability. It may be difficult to understand and debug the reasoning behind the planner's decisions, which could be a concern for user trust and regulatory approval. The authors note that developing more transparent and accountable language model-based systems is an important area for future work.
Overall, the asynchronous large language model enhanced planner presented in this paper represents a promising step towards more flexible and adaptive autonomous driving systems. However, further research is needed to address the potential limitations and ensure the safety and robustness of these systems in real-world deployment.
Conclusion
This paper introduces a novel approach to autonomous driving planning that leverages the power of large language models. By incorporating the language model's broad knowledge and reasoning capabilities, the system can generate driving plans in a more flexible and adaptive way compared to traditional rule-based or learning-based methods.
The authors demonstrate the effectiveness of their asynchronous planning framework through extensive simulations, showing that it can outperform state-of-the-art baselines on key metrics like safety and efficiency. This suggests that integrating large language models into autonomous driving systems could be a promising direction for improving their real-world performance and robustness.
However, the authors also acknowledge the potential challenges and limitations of this approach, such as the need for better model interpretability and robustness. Addressing these issues will be crucial for the successful deployment of language model-enhanced autonomous driving systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Superalignment Framework in Autonomous Driving with Large Language Models
Xiangrui Kong, Thomas Braunl, Marco Fahmi, Yue Wang
0
0
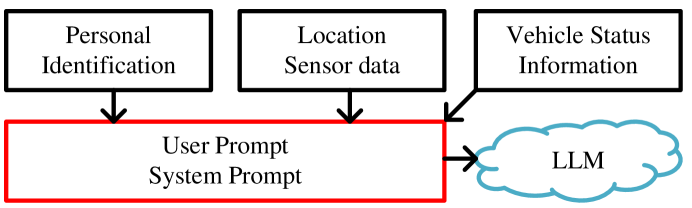
Over the last year, significant advancements have been made in the realms of large language models (LLMs) and multi-modal large language models (MLLMs), particularly in their application to autonomous driving. These models have showcased remarkable abilities in processing and interacting with complex information. In autonomous driving, LLMs and MLLMs are extensively used, requiring access to sensitive vehicle data such as precise locations, images, and road conditions. These data are transmitted to an LLM-based inference cloud for advanced analysis. However, concerns arise regarding data security, as the protection against data and privacy breaches primarily depends on the LLM's inherent security measures, without additional scrutiny or evaluation of the LLM's inference outputs. Despite its importance, the security aspect of LLMs in autonomous driving remains underexplored. Addressing this gap, our research introduces a novel security framework for autonomous vehicles, utilizing a multi-agent LLM approach. This framework is designed to safeguard sensitive information associated with autonomous vehicles from potential leaks, while also ensuring that LLM outputs adhere to driving regulations and align with human values. It includes mechanisms to filter out irrelevant queries and verify the safety and reliability of LLM outputs. Utilizing this framework, we evaluated the security, privacy, and cost aspects of eleven large language model-driven autonomous driving cues. Additionally, we performed QA tests on these driving prompts, which successfully demonstrated the framework's efficacy.
6/11/2024
Instruct Large Language Models to Drive like Humans
Ruijun Zhang, Xianda Guo, Wenzhao Zheng, Chenming Zhang, Kurt Keutzer, Long Chen
0
0
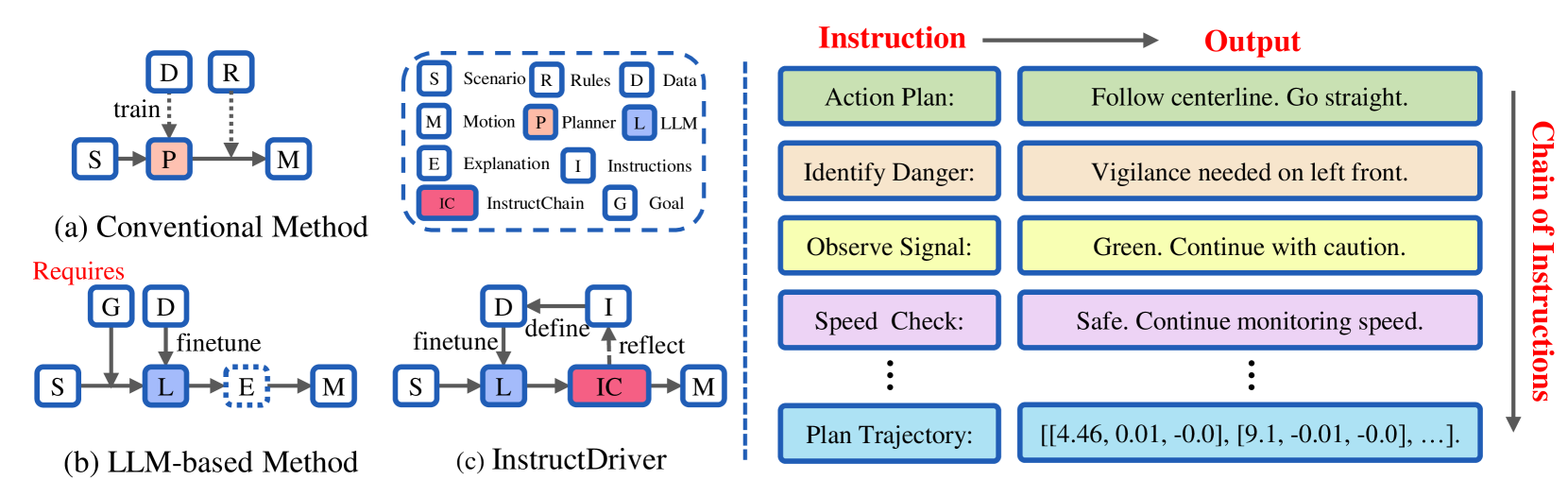
Motion planning in complex scenarios is the core challenge in autonomous driving. Conventional methods apply predefined rules or learn from driving data to plan the future trajectory. Recent methods seek the knowledge preserved in large language models (LLMs) and apply them in the driving scenarios. Despite the promising results, it is still unclear whether the LLM learns the underlying human logic to drive. In this paper, we propose an InstructDriver method to transform LLM into a motion planner with explicit instruction tuning to align its behavior with humans. We derive driving instruction data based on human logic (e.g., do not cause collisions) and traffic rules (e.g., proceed only when green lights). We then employ an interpretable InstructChain module to further reason the final planning reflecting the instructions. Our InstructDriver allows the injection of human rules and learning from driving data, enabling both interpretability and data scalability. Different from existing methods that experimented on closed-loop or simulated settings, we adopt the real-world closed-loop motion planning nuPlan benchmark for better evaluation. InstructDriver demonstrates the effectiveness of the LLM planner in a real-world closed-loop setting. Our code is publicly available at https://github.com/bonbon-rj/InstructDriver.
6/12/2024
💬
Graph-enhanced Large Language Models in Asynchronous Plan Reasoning
Fangru Lin, Emanuele La Malfa, Valentin Hofmann, Elle Michelle Yang, Anthony Cohn, Janet B. Pierrehumbert
0
0
Planning is a fundamental property of human intelligence. Reasoning about asynchronous plans is challenging since it requires sequential and parallel planning to optimize time costs. Can large language models (LLMs) succeed at this task? Here, we present the first large-scale study investigating this question. We find that a representative set of closed and open-source LLMs, including GPT-4 and LLaMA-2, behave poorly when not supplied with illustrations about the task-solving process in our benchmark AsyncHow. We propose a novel technique called Plan Like a Graph (PLaG) that combines graphs with natural language prompts and achieves state-of-the-art results. We show that although PLaG can boost model performance, LLMs still suffer from drastic degradation when task complexity increases, highlighting the limits of utilizing LLMs for simulating digital devices. We see our study as an exciting step towards using LLMs as efficient autonomous agents. Our code and data are available at https://github.com/fangru-lin/graph-llm-asynchow-plan.
6/4/2024

PlanAgent: A Multi-modal Large Language Agent for Closed-loop Vehicle Motion Planning
Yupeng Zheng, Zebin Xing, Qichao Zhang, Bu Jin, Pengfei Li, Yuhang Zheng, Zhongpu Xia, Kun Zhan, Xianpeng Lang, Yaran Chen, Dongbin Zhao
0
0
Vehicle motion planning is an essential component of autonomous driving technology. Current rule-based vehicle motion planning methods perform satisfactorily in common scenarios but struggle to generalize to long-tailed situations. Meanwhile, learning-based methods have yet to achieve superior performance over rule-based approaches in large-scale closed-loop scenarios. To address these issues, we propose PlanAgent, the first mid-to-mid planning system based on a Multi-modal Large Language Model (MLLM). MLLM is used as a cognitive agent to introduce human-like knowledge, interpretability, and common-sense reasoning into the closed-loop planning. Specifically, PlanAgent leverages the power of MLLM through three core modules. First, an Environment Transformation module constructs a Bird's Eye View (BEV) map and a lane-graph-based textual description from the environment as inputs. Second, a Reasoning Engine module introduces a hierarchical chain-of-thought from scene understanding to lateral and longitudinal motion instructions, culminating in planner code generation. Last, a Reflection module is integrated to simulate and evaluate the generated planner for reducing MLLM's uncertainty. PlanAgent is endowed with the common-sense reasoning and generalization capability of MLLM, which empowers it to effectively tackle both common and complex long-tailed scenarios. Our proposed PlanAgent is evaluated on the large-scale and challenging nuPlan benchmarks. A comprehensive set of experiments convincingly demonstrates that PlanAgent outperforms the existing state-of-the-art in the closed-loop motion planning task. Codes will be soon released.
6/5/2024