AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D Scans

0
Sign in to get full access
Overview
- Presents an automatic instance-based segmentation method for 3D LiDAR scans called AutoInst
- Leverages unsupervised learning to identify individual objects without relying on labeled training data
- Aims to improve upon existing methods for 3D scene understanding and object detection
Plain English Explanation
AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D Scans describes a new approach for analyzing 3D point cloud data captured by LiDAR sensors. The key innovation is that it can identify individual objects within the 3D scene without requiring any labeled training data.
Existing methods for 3D scene understanding and object detection often rely on supervised machine learning, where the system is trained on many examples of labeled data. In contrast, this new AutoInst approach uses an unsupervised learning technique called normalized cuts to automatically segment the 3D point cloud into distinct object instances.
The core idea is to group together points that are spatially close and have similar geometric properties, without any prior knowledge about the types of objects present. This allows the system to discover the individual objects in the scene, such as chairs, tables, or people, in an automated way.
By avoiding the need for labeled training data, AutoInst provides a more scalable and flexible approach to 3D scene understanding that could be useful for a variety of applications, from autonomous vehicles to robotic perception.
Technical Explanation
The AutoInst paper presents a novel method for automatically segmenting 3D LiDAR point clouds into individual object instances. Rather than relying on supervised learning with labeled training data, the approach uses an unsupervised normalized cuts algorithm to group together points that belong to the same physical object.
The key steps of the AutoInst pipeline are:
- Pre-processing: The raw 3D point cloud data is first preprocessed to remove noise and outliers, and to estimate surface normals for each point.
- Graph Construction: A weighted undirected graph is constructed, where each point in the cloud is represented as a node, and the edges between nodes encode the spatial proximity and geometric similarity between points.
- Normalized Cuts: The graph is then partitioned using the normalized cuts algorithm, which identifies clusters of nodes (i.e., points) that are strongly connected within the cluster but weakly connected to points outside the cluster. This allows the system to automatically segment the scene into distinct object instances.
- Refinement: The initial segmentation is further refined using additional post-processing steps to improve the quality of the object boundaries and remove any remaining noise or outliers.
The experiments demonstrate that AutoInst can effectively segment 3D LiDAR scans of indoor scenes into individual objects, without requiring any labeled training data. This unsupervised approach achieves comparable or better performance compared to supervised baselines on standard 3D benchmarks.
Critical Analysis
The AutoInst paper presents a novel and promising approach for 3D scene understanding that addresses some key limitations of existing supervised methods. By using an unsupervised segmentation algorithm, the system can discover object instances in a 3D point cloud without relying on labeled training data, which can be time-consuming and expensive to acquire.
However, the paper also acknowledges several limitations and areas for further research:
- The performance of the normalized cuts algorithm can be sensitive to the choice of parameters, and the authors note that more robust techniques for graph construction and partitioning may be needed.
- The method currently only operates on static 3D point clouds, and extension to dynamic or multi-view scenes would require additional innovations.
- While the unsupervised approach is a strength, the lack of semantic information about the object categories may limit the usefulness of the segmentation results for some applications.
Additionally, it would be valuable to see more thorough evaluation of the method's robustness to variations in sensor characteristics, scene complexity, and object occlusions, which can be common challenges in real-world 3D perception tasks.
Overall, the AutoInst paper presents an interesting and promising step forward in 3D scene understanding, and the unsupervised approach is an important contribution that could inspire further research in this direction.
Conclusion
The AutoInst paper introduces a novel method for automatically segmenting 3D LiDAR point clouds into individual object instances, without requiring any labeled training data. By leveraging an unsupervised normalized cuts algorithm, the system can discover the objects in a scene in a scalable and flexible way, which could be valuable for a variety of 3D perception applications.
While the method has some limitations that warrant further research, the core idea of using unsupervised learning for 3D scene understanding is an important contribution that could inspire new directions in this field. As 3D sensors become more ubiquitous, having robust and scalable techniques for interpreting 3D data will be increasingly crucial for applications ranging from autonomous vehicles to robotic manipulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AutoInst: Automatic Instance-Based Segmentation of LiDAR 3D Scans
Cedric Perauer, Laurenz Adrian Heidrich, Haifan Zhang, Matthias Nie{ss}ner, Anastasiia Kornilova, Alexey Artemov
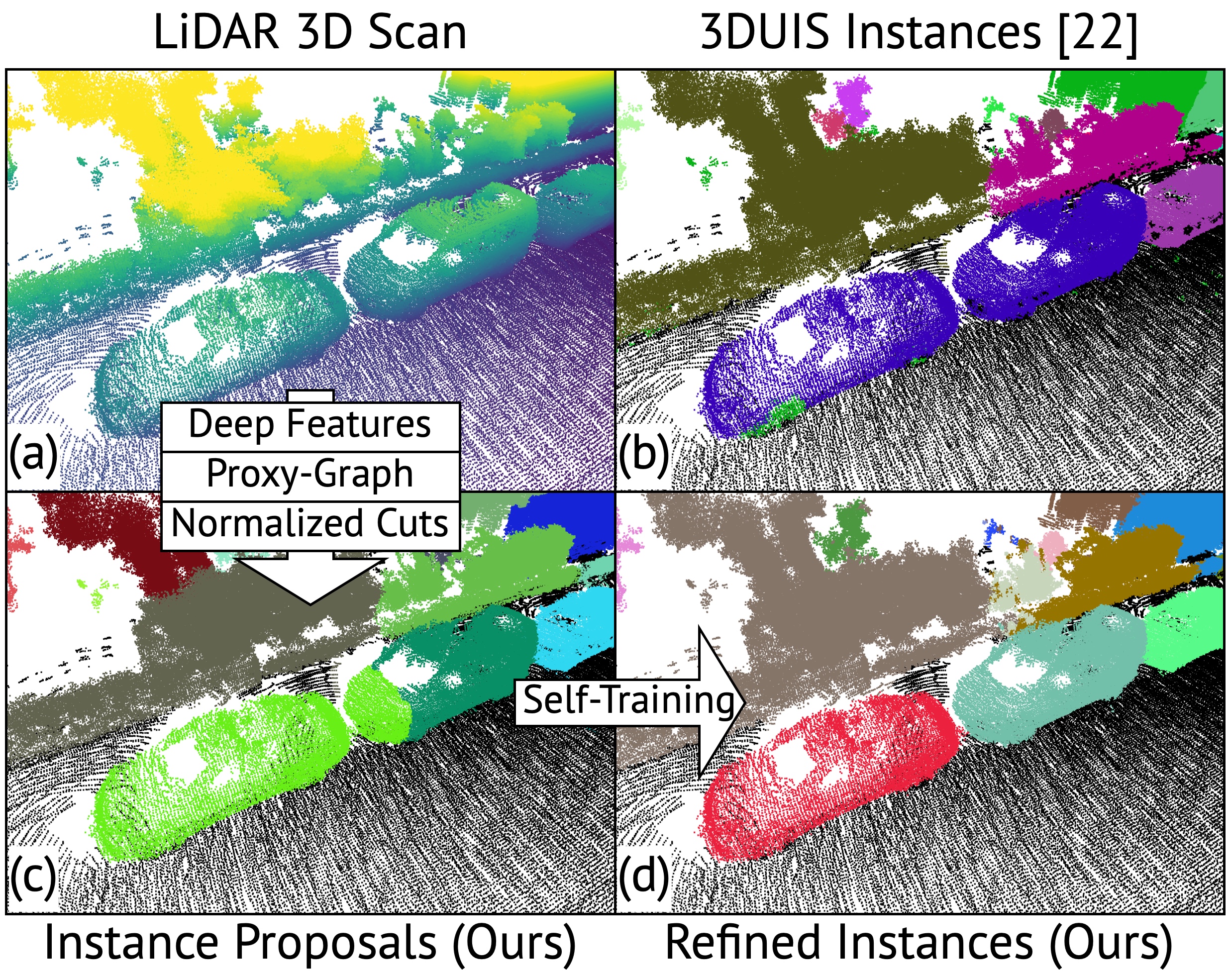
Recently, progress in acquisition equipment such as LiDAR sensors has enabled sensing increasingly spacious outdoor 3D environments. Making sense of such 3D acquisitions requires fine-grained scene understanding, such as constructing instance-based 3D scene segmentations. Commonly, a neural network is trained for this task; however, this requires access to a large, densely annotated dataset, which is widely known to be challenging to obtain. To address this issue, in this work we propose to predict instance segmentations for 3D scenes in an unsupervised way, without relying on ground-truth annotations. To this end, we construct a learning framework consisting of two components: (1) a pseudo-annotation scheme for generating initial unsupervised pseudo-labels; and (2) a self-training algorithm for instance segmentation to fit robust, accurate instances from initial noisy proposals. To enable generating 3D instance mask proposals, we construct a weighted proxy-graph by connecting 3D points with edges integrating multi-modal image- and point-based self-supervised features, and perform graph-cuts to isolate individual pseudo-instances. We then build on a state-of-the-art point-based architecture and train a 3D instance segmentation model, resulting in significant refinement of initial proposals. To scale to arbitrary complexity 3D scenes, we design our algorithm to operate on local 3D point chunks and construct a merging step to generate scene-level instance segmentations. Experiments on the challenging SemanticKITTI benchmark demonstrate the potential of our approach, where it attains 13.3% higher Average Precision and 9.1% higher F1 score compared to the best-performing baseline. The code will be made publicly available at https://github.com/artonson/autoinst.
Read more8/30/2024
0
UNIT: Unsupervised Online Instance Segmentation through Time
Corentin Sautier, Gilles Puy, Alexandre Boulch, Renaud Marlet, Vincent Lepetit
Online object segmentation and tracking in Lidar point clouds enables autonomous agents to understand their surroundings and make safe decisions. Unfortunately, manual annotations for these tasks are prohibitively costly. We tackle this problem with the task of class-agnostic unsupervised online instance segmentation and tracking. To that end, we leverage an instance segmentation backbone and propose a new training recipe that enables the online tracking of objects. Our network is trained on pseudo-labels, eliminating the need for manual annotations. We conduct an evaluation using metrics adapted for temporal instance segmentation. Computing these metrics requires temporally-consistent instance labels. When unavailable, we construct these labels using the available 3D bounding boxes and semantic labels in the dataset. We compare our method against strong baselines and demonstrate its superiority across two different outdoor Lidar datasets.
Read more9/14/2024
🤷
0
UnScene3D: Unsupervised 3D Instance Segmentation for Indoor Scenes
David Rozenberszki, Or Litany, Angela Dai
3D instance segmentation is fundamental to geometric understanding of the world around us. Existing methods for instance segmentation of 3D scenes rely on supervision from expensive, manual 3D annotations. We propose UnScene3D, the first fully unsupervised 3D learning approach for class-agnostic 3D instance segmentation of indoor scans. UnScene3D first generates pseudo masks by leveraging self-supervised color and geometry features to find potential object regions. We operate on a basis of geometric oversegmentation, enabling efficient representation and learning on high-resolution 3D data. The coarse proposals are then refined through self-training our model on its predictions. Our approach improves over state-of-the-art unsupervised 3D instance segmentation methods by more than 300% Average Precision score, demonstrating effective instance segmentation even in challenging, cluttered 3D scenes.
Read more5/1/2024

0
Bayesian Self-Training for Semi-Supervised 3D Segmentation
Ozan Unal, Christos Sakaridis, Luc Van Gool
3D segmentation is a core problem in computer vision and, similarly to many other dense prediction tasks, it requires large amounts of annotated data for adequate training. However, densely labeling 3D point clouds to employ fully-supervised training remains too labor intensive and expensive. Semi-supervised training provides a more practical alternative, where only a small set of labeled data is given, accompanied by a larger unlabeled set. This area thus studies the effective use of unlabeled data to reduce the performance gap that arises due to the lack of annotations. In this work, inspired by Bayesian deep learning, we first propose a Bayesian self-training framework for semi-supervised 3D semantic segmentation. Employing stochastic inference, we generate an initial set of pseudo-labels and then filter these based on estimated point-wise uncertainty. By constructing a heuristic $n$-partite matching algorithm, we extend the method to semi-supervised 3D instance segmentation, and finally, with the same building blocks, to dense 3D visual grounding. We demonstrate state-of-the-art results for our semi-supervised method on SemanticKITTI and ScribbleKITTI for 3D semantic segmentation and on ScanNet and S3DIS for 3D instance segmentation. We further achieve substantial improvements in dense 3D visual grounding over supervised-only baselines on ScanRefer. Our project page is available at ouenal.github.io/bst/.
Read more9/14/2024