Autonomous Agents for Collaborative Task under Information Asymmetry

0

Sign in to get full access
Overview
- This paper explores the use of autonomous agents in collaborative tasks under information asymmetry, where agents have incomplete information about the environment or other agents.
- The researchers propose a novel framework for generating autonomous agents that can effectively cooperate and negotiate in such scenarios.
- The paper presents experimental results demonstrating the capabilities of the proposed approach and discusses the implications for real-world applications.
Plain English Explanation
In many real-world situations, people or organizations need to work together to accomplish a task, but they may not have full information about the environment or the other people they're working with. This can make it challenging to coordinate and cooperate effectively.
The researchers in this paper developed a new way to create autonomous agents - computer programs that can act on their own - that are designed to work together on tasks even when they don't have complete information. These agents can negotiate with each other and adapt their strategies based on the information they do have, in order to achieve the best possible outcome for the group.
The paper describes experiments where these autonomous agents were tested in simulated collaborative scenarios, and the researchers found that the agents were able to successfully cooperate and complete tasks despite the information gaps. This suggests that this approach could be useful in real-world applications, such as link to "autoagents-framework-automatic-agent-generation" where autonomous agents need to work together, or link to "exploring-collaboration-mechanisms-llm-agents-social-psychology" where artificial intelligence systems need to collaborate with humans.
Technical Explanation
The paper presents a framework for generating autonomous agents that can effectively collaborate on tasks under conditions of information asymmetry. The key components of the framework include:
-
Agent Architecture: The agents are designed with a modular architecture that includes components for perception, reasoning, and action. This allows the agents to adapt their behavior based on the information available to them.
-
Negotiation Protocols: The agents use specialized negotiation protocols to communicate and coordinate with each other, even when they don't have complete information about the task or the other agents' capabilities.
-
Learning Mechanisms: The agents employ machine learning techniques to continually update their models of the environment and the other agents, allowing them to optimize their strategies over time.
The researchers conducted experiments simulating collaborative tasks where the agents had varying levels of information about the environment and the other agents. The results showed that the proposed framework enabled the agents to outperform alternative approaches, particularly in scenarios with high information asymmetry.
Critical Analysis
The paper presents a compelling approach to enabling autonomous agents to collaborate effectively under conditions of incomplete information. However, the researchers acknowledge several limitations and areas for further research:
-
Scalability: While the framework was able to handle the collaborative tasks in the experiments, the authors note that scaling to larger, more complex scenarios may require additional architectural or algorithmic enhancements.
-
Robustness: The paper focuses on the agents' ability to adapt to information asymmetry, but it doesn't thoroughly explore their resilience to other types of challenges, such as link to "is-this-real-life-is-this-just" dynamic environments or adversarial behavior from other agents.
-
Real-World Applicability: The experiments were conducted in simulated environments, and the researchers acknowledge the need for further validation in real-world settings to assess the practical feasibility and impact of the proposed approach.
Overall, the paper presents a promising framework for enabling autonomous agents to collaborate effectively in the face of incomplete information. However, additional research is needed to address the identified limitations and explore the broader implications of this work for link to "human-agent-cooperation-games-under-incomplete-information" and link to "survey-large-language-model-based-autonomous-agents".
Conclusion
This paper introduces a novel framework for generating autonomous agents that can effectively collaborate on tasks even when they have incomplete information about the environment or other agents. The researchers demonstrated the capability of their approach through experiments, and they discussed the potential implications for real-world applications where autonomous agents need to work together under conditions of uncertainty.
While the framework shows promise, the authors also identified several areas for further research, such as improving scalability, robustness, and real-world validation. Overall, this work represents an important step forward in the development of autonomous systems that can navigate complex, information-constrained environments and cooperate to achieve shared goals.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Autonomous Agents for Collaborative Task under Information Asymmetry
Wei Liu, Chenxi Wang, Yifei Wang, Zihao Xie, Rennai Qiu, Yufan Dang, Zhuoyun Du, Weize Chen, Cheng Yang, Chen Qian
Large Language Model Multi-Agent Systems (LLM-MAS) have achieved great progress in solving complex tasks. It performs communication among agents within the system to collaboratively solve tasks, under the premise of shared information. However, when agents' communication is leveraged to enhance human cooperation, a new challenge arises due to information asymmetry, since each agent can only access the information of its human user. Previous MAS struggle to complete tasks under this condition. To address this, we propose a new MAS paradigm termed iAgents, which denotes Informative Multi-Agent Systems. In iAgents, the human social network is mirrored in the agent network, where agents proactively exchange human information necessary for task resolution, thereby overcoming information asymmetry. iAgents employs a novel agent reasoning mechanism, InfoNav, to navigate agents' communication towards effective information exchange. Together with InfoNav, iAgents organizes human information in a mixed memory to provide agents with accurate and comprehensive information for exchange. Additionally, we introduce InformativeBench, the first benchmark tailored for evaluating LLM agents' task-solving ability under information asymmetry. Experimental results show that iAgents can collaborate within a social network of 140 individuals and 588 relationships, autonomously communicate over 30 turns, and retrieve information from nearly 70,000 messages to complete tasks within 3 minutes.
Read more6/24/2024
🌿
0
Human-Agent Cooperation in Games under Incomplete Information through Natural Language Communication
Shenghui Chen, Daniel Fried, Ufuk Topcu
Developing autonomous agents that can strategize and cooperate with humans under information asymmetry is challenging without effective communication in natural language. We introduce a shared-control game, where two players collectively control a token in alternating turns to achieve a common objective under incomplete information. We formulate a policy synthesis problem for an autonomous agent in this game with a human as the other player. To solve this problem, we propose a communication-based approach comprising a language module and a planning module. The language module translates natural language messages into and from a finite set of flags, a compact representation defined to capture player intents. The planning module leverages these flags to compute a policy using an asymmetric information-set Monte Carlo tree search with flag exchange algorithm we present. We evaluate the effectiveness of this approach in a testbed based on Gnomes at Night, a search-and-find maze board game. Results of human subject experiments show that communication narrows the information gap between players and enhances human-agent cooperation efficiency with fewer turns.
Read more6/4/2024
0
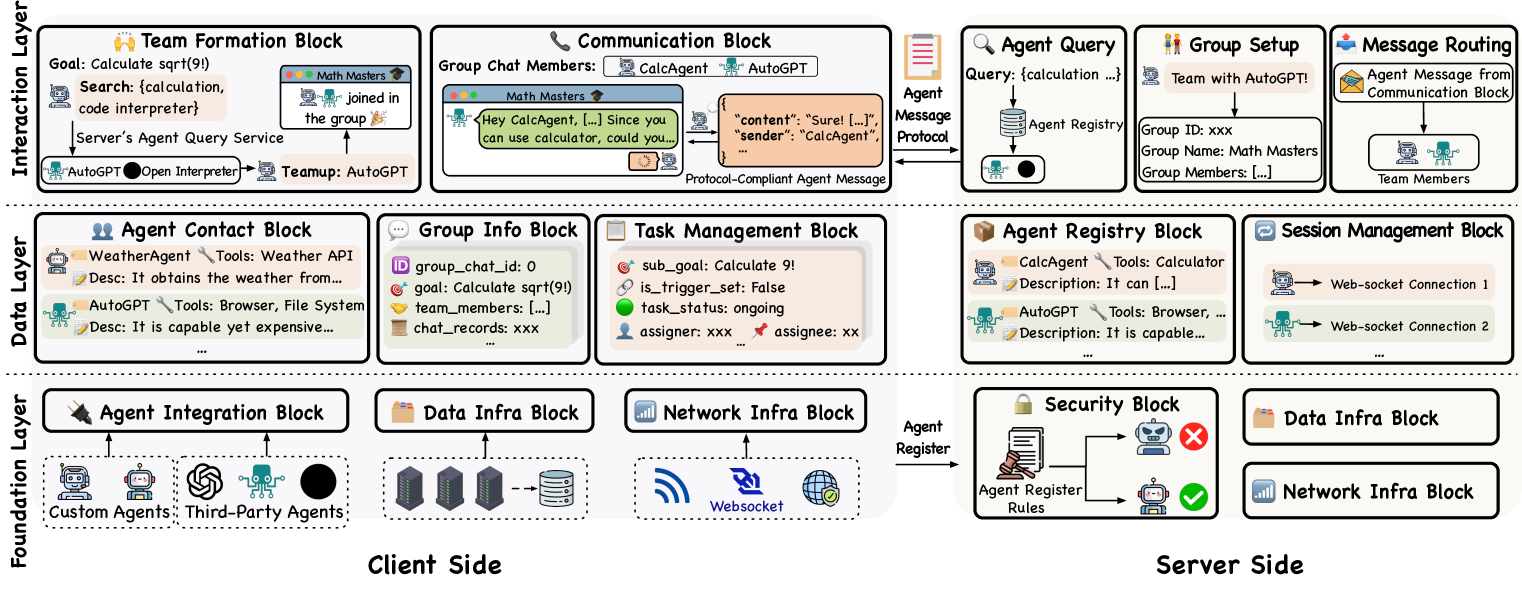
Internet of Agents: Weaving a Web of Heterogeneous Agents for Collaborative Intelligence
Weize Chen, Ziming You, Ran Li, Yitong Guan, Chen Qian, Chenyang Zhao, Cheng Yang, Ruobing Xie, Zhiyuan Liu, Maosong Sun
The rapid advancement of large language models (LLMs) has paved the way for the development of highly capable autonomous agents. However, existing multi-agent frameworks often struggle with integrating diverse capable third-party agents due to reliance on agents defined within their own ecosystems. They also face challenges in simulating distributed environments, as most frameworks are limited to single-device setups. Furthermore, these frameworks often rely on hard-coded communication pipelines, limiting their adaptability to dynamic task requirements. Inspired by the concept of the Internet, we propose the Internet of Agents (IoA), a novel framework that addresses these limitations by providing a flexible and scalable platform for LLM-based multi-agent collaboration. IoA introduces an agent integration protocol, an instant-messaging-like architecture design, and dynamic mechanisms for agent teaming and conversation flow control. Through extensive experiments on general assistant tasks, embodied AI tasks, and retrieval-augmented generation benchmarks, we demonstrate that IoA consistently outperforms state-of-the-art baselines, showcasing its ability to facilitate effective collaboration among heterogeneous agents. IoA represents a step towards linking diverse agents in an Internet-like environment, where agents can seamlessly collaborate to achieve greater intelligence and capabilities. Our codebase has been released at url{https://github.com/OpenBMB/IoA}.
Read more7/11/2024
0
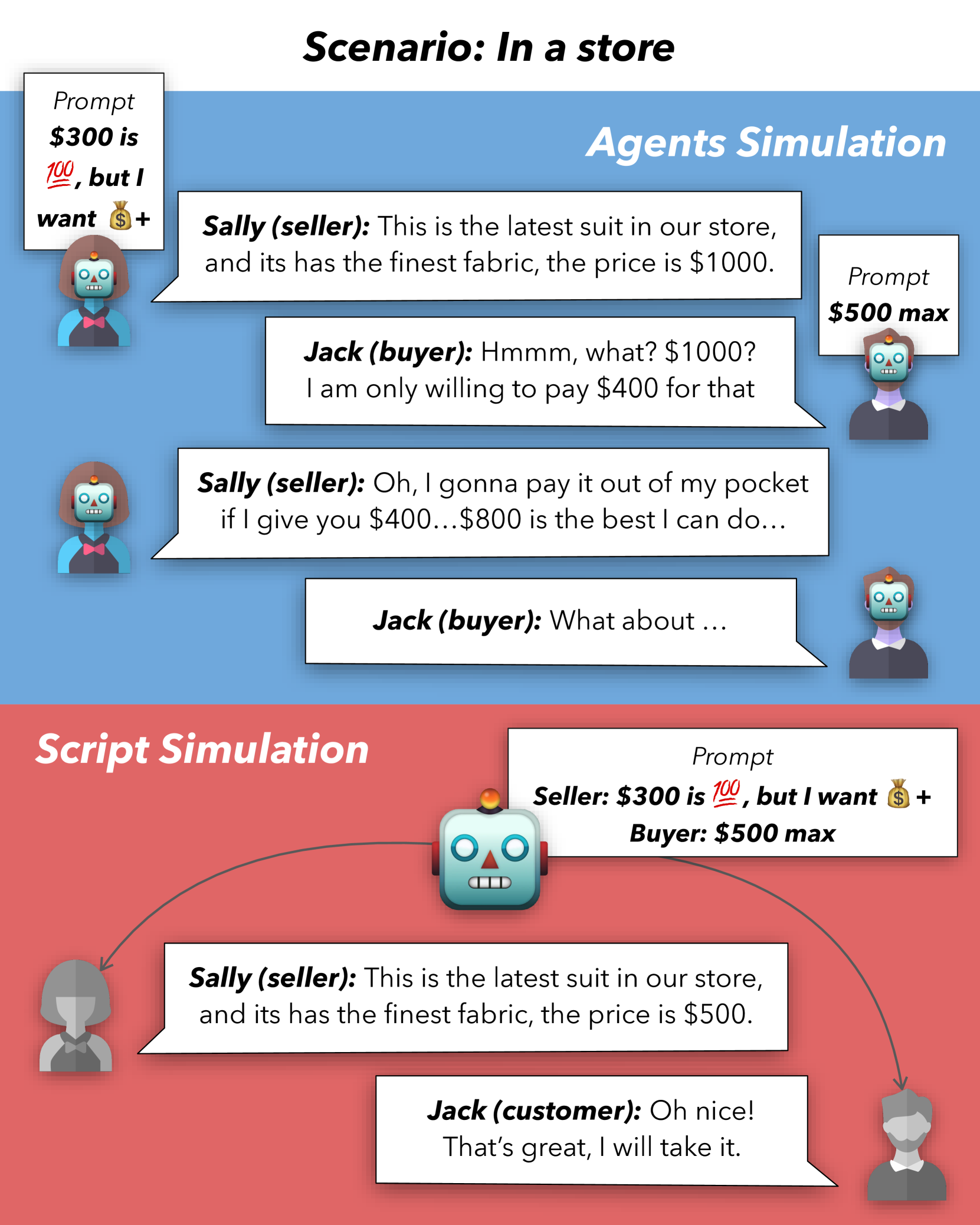
Is this the real life? Is this just fantasy? The Misleading Success of Simulating Social Interactions With LLMs
Xuhui Zhou, Zhe Su, Tiwalayo Eisape, Hyunwoo Kim, Maarten Sap
Recent advances in large language models (LLM) have enabled richer social simulations, allowing for the study of various social phenomena. However, most recent work has used a more omniscient perspective on these simulations (e.g., single LLM to generate all interlocutors), which is fundamentally at odds with the non-omniscient, information asymmetric interactions that involve humans and AI agents in the real world. To examine these differences, we develop an evaluation framework to simulate social interactions with LLMs in various settings (omniscient, non-omniscient). Our experiments show that LLMs perform better in unrealistic, omniscient simulation settings but struggle in ones that more accurately reflect real-world conditions with information asymmetry. Our findings indicate that addressing information asymmetry remains a fundamental challenge for LLM-based agents.
Read more4/22/2024