Human-Agent Cooperation in Games under Incomplete Information through Natural Language Communication

0
🌿
Sign in to get full access
Overview
- Developing effective communication between autonomous agents and humans is crucial for successful collaboration under incomplete information.
- The researchers introduce a shared-control game where two players take turns controlling a token to achieve a common objective.
- They propose a communication-based approach to enable an autonomous agent to play this game with a human player, comprising a language module and a planning module.
- The language module translates natural language messages into a compact set of "flags" representing player intents, while the planning module uses these flags to compute a policy.
- The effectiveness of this approach is evaluated in a board game testbed, showing that communication can enhance human-agent cooperation.
Plain English Explanation
The paper presents a way for autonomous agents, like AI systems, to effectively communicate and cooperate with human players in a game-like setting where both sides have incomplete information. The key idea is to have the AI system translate the human player's natural language messages into a simplified set of "flags" that represent their intentions. This allows the AI's planning module to understand the human's goals and strategize accordingly.
Imagine a treasure hunt game where you and an AI agent are searching for hidden items together. You might say something like "I think the treasure is to the left," and the AI would translate that into a flag like "EXPLORE_LEFT." The AI can then use this flag, along with other information, to decide its next move in the game to work towards the shared goal more efficiently.
The researchers test this approach in a maze-based game and find that the communication between the human and AI helps narrow the information gap, leading to faster and more effective cooperation. This suggests that such communication-based approaches could be valuable for building AI systems that can work alongside humans in complex, uncertain environments.
Technical Explanation
The paper formulates a policy synthesis problem for an autonomous agent playing a shared-control game with a human player. In this game, the two players take turns controlling a token to collectively achieve a common objective, but they have incomplete information about the game state.
To address this problem, the researchers propose a communication-based approach comprising two key modules:
- Language Module: This module translates the human player's natural language messages into a finite set of flags, a compact representation designed to capture the player's intents and goals.
- Planning Module: This module uses the exchanged flags to compute a policy for the autonomous agent, leveraging an asymmetric information-set Monte Carlo tree search with flag exchange algorithm.
The effectiveness of this approach is evaluated in a testbed based on the "Gnomes at Night" board game, a search-and-find maze game. The results of human subject experiments show that communication through the exchange of flags helps to narrow the information gap between the human and agent players, leading to enhanced cooperation efficiency with fewer turns required to achieve the shared objective.
Critical Analysis
The paper presents a promising approach for enabling effective communication and cooperation between autonomous agents and human players in scenarios with incomplete information. The use of a simplified "flag" representation to capture player intents is an interesting solution to the challenge of translating natural language into a format that can be easily processed by the planning module.
However, the paper does not address the potential limitations of this approach. For example, it's unclear how well the language module would perform in handling more complex or ambiguous natural language input, or how the system would handle situations where the human player's intentions are not easily translatable into the predefined set of flags. Additionally, the paper does not discuss the potential for bias or misunderstandings to arise in the communication process, which could undermine the effectiveness of the collaboration.
Further research would be needed to explore the broader applicability of this approach, such as its performance in more open-ended communication scenarios or its scalability to more complex games and domains. Additionally, it would be valuable to investigate the potential for large language models to enhance the communication capabilities of such systems.
Conclusion
The paper presents a novel communication-based approach for enabling effective collaboration between autonomous agents and human players in a shared-control game scenario with incomplete information. By translating natural language messages into a simplified "flag" representation, the system allows the agent to understand and respond to the human player's intents, leading to more efficient cooperation.
The results of the human subject experiments suggest that this approach holds promise for developing AI systems that can work seamlessly alongside humans in complex, uncertain environments. Further research is needed to explore the broader applicability and potential limitations of this communication-based framework, but it represents an important step forward in the quest to build autonomous agents that can effectively engage with and assist human users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
0
Human-Agent Cooperation in Games under Incomplete Information through Natural Language Communication
Shenghui Chen, Daniel Fried, Ufuk Topcu
Developing autonomous agents that can strategize and cooperate with humans under information asymmetry is challenging without effective communication in natural language. We introduce a shared-control game, where two players collectively control a token in alternating turns to achieve a common objective under incomplete information. We formulate a policy synthesis problem for an autonomous agent in this game with a human as the other player. To solve this problem, we propose a communication-based approach comprising a language module and a planning module. The language module translates natural language messages into and from a finite set of flags, a compact representation defined to capture player intents. The planning module leverages these flags to compute a policy using an asymmetric information-set Monte Carlo tree search with flag exchange algorithm we present. We evaluate the effectiveness of this approach in a testbed based on Gnomes at Night, a search-and-find maze board game. Results of human subject experiments show that communication narrows the information gap between players and enhances human-agent cooperation efficiency with fewer turns.
Read more6/4/2024

0
Autonomous Agents for Collaborative Task under Information Asymmetry
Wei Liu, Chenxi Wang, Yifei Wang, Zihao Xie, Rennai Qiu, Yufan Dang, Zhuoyun Du, Weize Chen, Cheng Yang, Chen Qian
Large Language Model Multi-Agent Systems (LLM-MAS) have achieved great progress in solving complex tasks. It performs communication among agents within the system to collaboratively solve tasks, under the premise of shared information. However, when agents' communication is leveraged to enhance human cooperation, a new challenge arises due to information asymmetry, since each agent can only access the information of its human user. Previous MAS struggle to complete tasks under this condition. To address this, we propose a new MAS paradigm termed iAgents, which denotes Informative Multi-Agent Systems. In iAgents, the human social network is mirrored in the agent network, where agents proactively exchange human information necessary for task resolution, thereby overcoming information asymmetry. iAgents employs a novel agent reasoning mechanism, InfoNav, to navigate agents' communication towards effective information exchange. Together with InfoNav, iAgents organizes human information in a mixed memory to provide agents with accurate and comprehensive information for exchange. Additionally, we introduce InformativeBench, the first benchmark tailored for evaluating LLM agents' task-solving ability under information asymmetry. Experimental results show that iAgents can collaborate within a social network of 140 individuals and 588 relationships, autonomously communicate over 30 turns, and retrieve information from nearly 70,000 messages to complete tasks within 3 minutes.
Read more6/24/2024
📶
0
Explaining Decisions of Agents in Mixed-Motive Games
Maayan Orner, Oleg Maksimov, Akiva Kleinerman, Charles Ortiz, Sarit Kraus
In recent years, agents have become capable of communicating seamlessly via natural language and navigating in environments that involve cooperation and competition, a fact that can introduce social dilemmas. Due to the interleaving of cooperation and competition, understanding agents' decision-making in such environments is challenging, and humans can benefit from obtaining explanations. However, such environments and scenarios have rarely been explored in the context of explainable AI. While some explanation methods for cooperative environments can be applied in mixed-motive setups, they do not address inter-agent competition, cheap-talk, or implicit communication by actions. In this work, we design explanation methods to address these issues. Then, we proceed to demonstrate their effectiveness and usefulness for humans, using a non-trivial mixed-motive game as a test case. Lastly, we establish generality and demonstrate the applicability of the methods to other games, including one where we mimic human game actions using large language models.
Read more7/23/2024
0
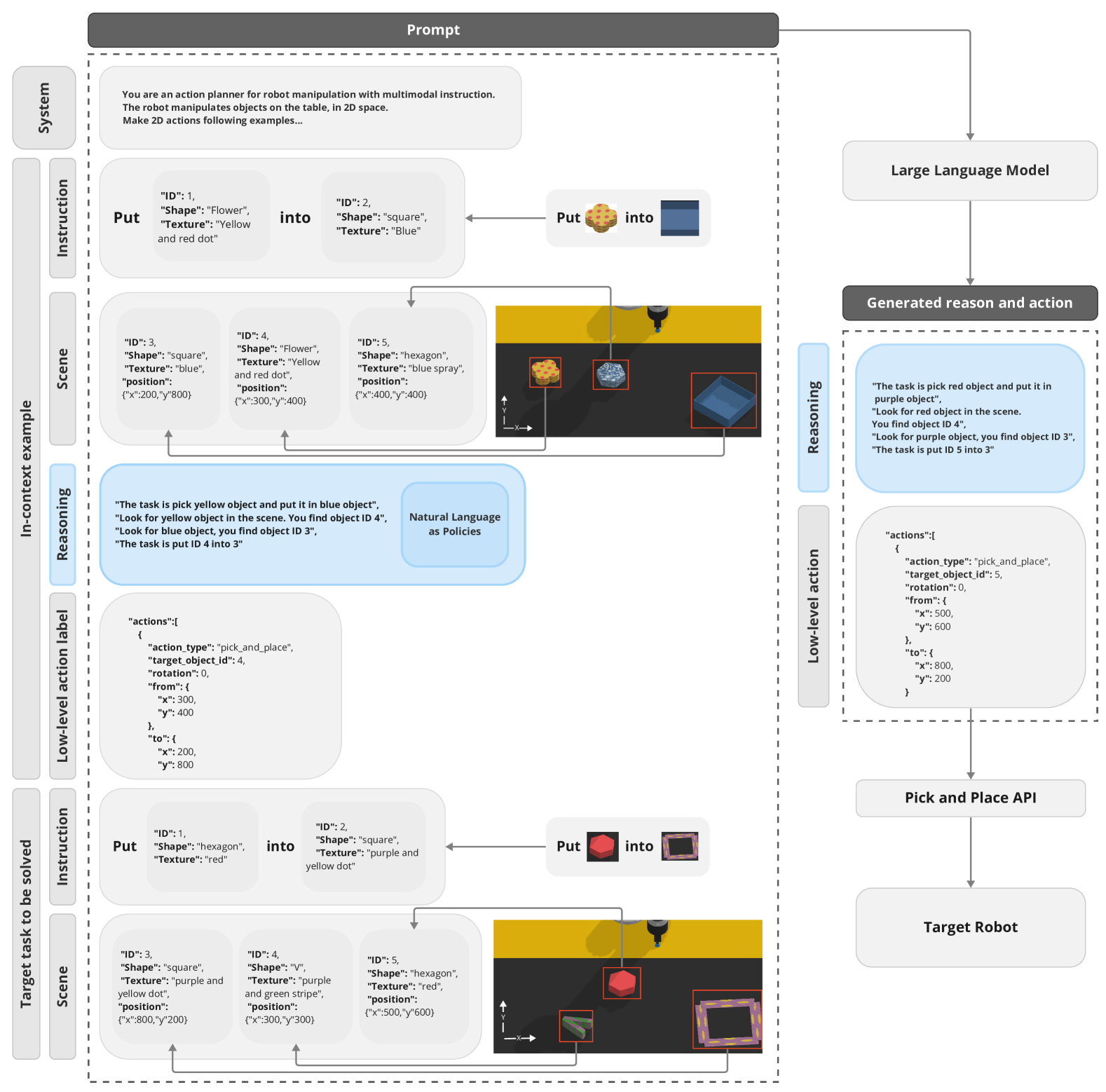
Natural Language as Policies: Reasoning for Coordinate-Level Embodied Control with LLMs
Yusuke Mikami, Andrew Melnik, Jun Miura, Ville Hautamaki
We demonstrate experimental results with LLMs that address robotics task planning problems. Recently, LLMs have been applied in robotics task planning, particularly using a code generation approach that converts complex high-level instructions into mid-level policy codes. In contrast, our approach acquires text descriptions of the task and scene objects, then formulates task planning through natural language reasoning, and outputs coordinate level control commands, thus reducing the necessity for intermediate representation code as policies with pre-defined APIs. Our approach is evaluated on a multi-modal prompt simulation benchmark, demonstrating that our prompt engineering experiments with natural language reasoning significantly enhance success rates compared to its absence. Furthermore, our approach illustrates the potential for natural language descriptions to transfer robotics skills from known tasks to previously unseen tasks. The project website: https://natural-language-as-policies.github.io/
Read more4/9/2024