An Autonomous Drone Swarm for Detecting and Tracking Anomalies among Dense Vegetation

0
⛏️
Sign in to get full access
Overview
- Drones in swarms can provide increased sensing capabilities by adapting their behavior to local conditions.
- Detecting and tracking occluded targets is made more feasible through this approach.
- Anomaly detection on synthetic aperture images is robust to dense occlusion, unlike conventional object classification.
- The autonomous swarm adapts its sampling pattern to optimize for local viewing conditions.
- Real-world experiments with six drones achieved high positional accuracy, precision, and recall.
Plain English Explanation
Swarms of drones can work together to improve how they sense the environment. By mimicking the behaviors of natural swarms, like flocks of birds, the drones can adjust how they fly and gather information to better suit the local conditions. This makes it much easier to detect and track targets that are hidden or obscured, which is a common problem.
Traditional methods of object classification in aerial images struggle with randomness and variability caused by occlusion, even in lightly obscured scenes. However, the researchers found that using anomaly detection on synthetic aperture images is a more robust approach, especially in dense environments like forests.
The autonomous swarm continuously searches the environment, looking for things that are unexpected or unknown. As it tracks these occurrences, the swarm adapts its flight patterns to optimize how it views the targets, improving its ability to monitor them.
In real-world tests with six drones, the system achieved impressive results, with high accuracy, precision, and recall in locating the targets. The drones used an adapted particle swarm optimization algorithm that considers detection confidence and predicted target appearance.
The researchers also developed a complete hardware and software framework that enables low-latency data transmission and fast processing of the extensive video and telemetry data required to coordinate the swarm, which can scale up to ten drones.
Technical Explanation
The researchers demonstrate that using a swarm of drones with adaptive behaviors, inspired by natural swarms, can significantly improve the ability to detect and track heavily occluded targets. While traditional object classification approaches struggle with the randomness and variability introduced by occlusion, the team found that using anomaly detection on synthetic aperture integral images is a more robust method, especially in dense environments like forests.
The autonomous swarm continuously searches the environment, adapting its sampling pattern to optimize for local viewing conditions. The team used an adapted particle swarm optimization algorithm that considers detection confidences and predicted target appearance to guide the swarm's movements.
In their real-world experiments with six drones, the system achieved an average positional accuracy of 0.39 m, with an average precision of 93.2% and an average recall of 95.9%. The researchers also demonstrate that sensor noise can be effectively included in the synthetic aperture image integration process, removing the need for computationally costly optimization of high-dimensional parameter spaces.
The team developed a complete hardware and software framework that supports low-latency transmission (approximately 80 ms round-trip time) and fast processing (approximately 600 ms per formation step) of extensive (70-120 Mbit/s) video and telemetry data, as well as swarm control for up to ten drones.
Critical Analysis
The research presented in this paper demonstrates a promising approach to enhancing the detection and tracking of occluded targets using a swarm of adaptive drones. The use of anomaly detection on synthetic aperture images, rather than traditional object classification, is a notable strength of the system, as it appears to be more robust to the challenges posed by dense occlusion.
However, the paper does not provide much detail on the specific algorithms or techniques used for the anomaly detection, nor does it compare the performance of this approach to other anomaly detection methods. Additionally, while the real-world experiments with six drones were successful, it would be useful to see how the system scales and performs with larger swarm sizes.
The researchers mention that sensor noise can be effectively incorporated into the synthetic aperture image integration process, but it's not entirely clear how this is achieved or what the implications are. Further elaboration on this aspect of the system would be helpful for understanding its robustness and potential limitations.
Overall, the research presented in this paper is promising and demonstrates the potential of using adaptive drone swarms for complex sensing and monitoring tasks. However, additional details and further exploration of the system's capabilities and limitations would strengthen the contribution of this work.
Conclusion
This research showcases a novel approach to using swarms of drones to enhance the detection and tracking of occluded targets. By leveraging adaptive behaviors inspired by natural swarms, the system is able to optimize its sensing capabilities for local conditions, making it more effective at dealing with dense occlusion compared to traditional object classification methods.
The use of anomaly detection on synthetic aperture images, combined with an adapted particle swarm optimization algorithm, enables the autonomous swarm to continuously search the environment and adapt its sampling patterns to improve its monitoring of unexpected or unknown occurrences.
The real-world experiments with six drones demonstrate the practical feasibility of this approach, achieving impressive results in terms of positional accuracy, precision, and recall. The researchers have also developed a comprehensive hardware and software framework to support the low-latency data transmission and fast processing required for coordinating larger swarms of up to ten drones.
While the paper leaves some aspects of the system's implementation and performance unclear, this research represents an important step forward in the field of adaptive drone swarms and their applications in complex sensing and monitoring tasks, particularly in environments with significant occlusion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⛏️
0
An Autonomous Drone Swarm for Detecting and Tracking Anomalies among Dense Vegetation
Rakesh John Amala Arokia Nathan, Sigrid Strand, Daniel Mehrwald, Dmitriy Shutin, Oliver Bimber
Swarms of drones offer an increased sensing aperture, and having them mimic behaviors of natural swarms enhances sampling by adapting the aperture to local conditions. We demonstrate that such an approach makes detecting and tracking heavily occluded targets practically feasible. While object classification applied to conventional aerial images generalizes poorly the randomness of occlusion and is therefore inefficient even under lightly occluded conditions, anomaly detection applied to synthetic aperture integral images is robust for dense vegetation, such as forests, and is independent of pre-trained classes. Our autonomous swarm searches the environment for occurrences of the unknown or unexpected, tracking them while continuously adapting its sampling pattern to optimize for local viewing conditions. In our real-life field experiments with a swarm of six drones, we achieved an average positional accuracy of 0.39 m with an average precision of 93.2% and an average recall of 95.9%. Here, adapted particle swarm optimization considers detection confidences and predicted target appearance. We show that sensor noise can effectively be included in the synthetic aperture image integration process, removing the need for a computationally costly optimization of high-dimensional parameter spaces. Finally, we present a complete hard- and software framework that supports low-latency transmission (approx. 80 ms round-trip time) and fast processing (approx. 600 ms per formation step) of extensive (70-120 Mbit/s) video and telemetry data, and swarm control for swarms of up to ten drones.
Read more7/16/2024
0
Watching Swarm Dynamics from Above: A Framework for Advanced Object Tracking in Drone Videos
Duc Pham, Matthew Hansen, F'elicie Dhellemmens, Jens Krause, Pia Bideau
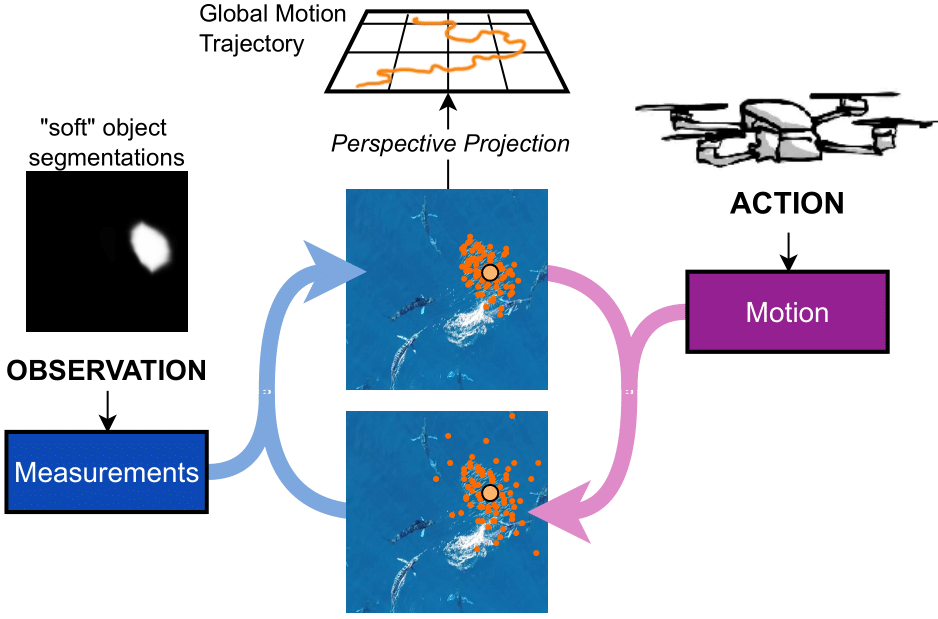
Easily accessible sensors, like drones with diverse onboard sensors, have greatly expanded studying animal behavior in natural environments. Yet, analyzing vast, unlabeled video data, often spanning hours, remains a challenge for machine learning, especially in computer vision. Existing approaches often analyze only a few frames. Our focus is on long-term animal behavior analysis. To address this challenge, we utilize classical probabilistic methods for state estimation, such as particle filtering. By incorporating recent advancements in semantic object segmentation, we enable continuous tracking of rapidly evolving object formations, even in scenarios with limited data availability. Particle filters offer a provably optimal algorithmic structure for recursively adding new incoming information. We propose a novel approach for tracking schools of fish in the open ocean from drone videos. Our framework not only performs classical object tracking in 2D, instead it tracks the position and spatial expansion of the fish school in world coordinates by fusing video data and the drone's on board sensor information (GPS and IMU). The presented framework for the first time allows researchers to study collective behavior of fish schools in its natural social and environmental context in a non-invasive and scalable way.
Read more6/13/2024
🛠️
0
High-Speed Motion Planning for Aerial Swarms in Unknown and Cluttered Environments
Charbel Toumieh, Dario Floreano
Coordinated flight of multiple drones allows to achieve tasks faster such as search and rescue and infrastructure inspection. Thus, pushing the state-of-the-art of aerial swarms in navigation speed and robustness is of tremendous benefit. In particular, being able to account for unexplored/unknown environments when planning trajectories allows for safer flight. In this work, we propose the first high-speed, decentralized, and synchronous motion planning framework (HDSM) for an aerial swarm that explicitly takes into account the unknown/undiscovered parts of the environment. The proposed approach generates an optimized trajectory for each planning agent that avoids obstacles and other planning agents while moving and exploring the environment. The only global information that each agent has is the target location. The generated trajectory is high-speed, safe from unexplored spaces, and brings the agent closer to its goal. The proposed method outperforms four recent state-of-the-art methods in success rate (100% success in reaching the target location), flight speed (97% faster), and flight time (50% lower). Finally, the method is validated on a set of Crazyflie nano-drones as a proof of concept.
Read more7/15/2024

0
Gen-Swarms: Adapting Deep Generative Models to Swarms of Drones
Carlos Plou, Pablo Pueyo, Ruben Martinez-Cantin, Mac Schwager, Ana C. Murillo, Eduardo Montijano
Gen-Swarms is an innovative method that leverages and combines the capabilities of deep generative models with reactive navigation algorithms to automate the creation of drone shows. Advancements in deep generative models, particularly diffusion models, have demonstrated remarkable effectiveness in generating high-quality 2D images. Building on this success, various works have extended diffusion models to 3D point cloud generation. In contrast, alternative generative models such as flow matching have been proposed, offering a simple and intuitive transition from noise to meaningful outputs. However, the application of flow matching models to 3D point cloud generation remains largely unexplored. Gen-Swarms adapts these models to automatically generate drone shows. Existing 3D point cloud generative models create point trajectories which are impractical for drone swarms. In contrast, our method not only generates accurate 3D shapes but also guides the swarm motion, producing smooth trajectories and accounting for potential collisions through a reactive navigation algorithm incorporated into the sampling process. For example, when given a text category like Airplane, Gen-Swarms can rapidly and continuously generate numerous variations of 3D airplane shapes. Our experiments demonstrate that this approach is particularly well-suited for drone shows, providing feasible trajectories, creating representative final shapes, and significantly enhancing the overall performance of drone show generation.
Read more8/29/2024