Watching Swarm Dynamics from Above: A Framework for Advanced Object Tracking in Drone Videos

0
Sign in to get full access
Overview
- This paper presents a framework for advanced object tracking in drone videos, with a focus on analyzing swarm dynamics.
- The proposed approach leverages computer vision and machine learning techniques to track and analyze the movement patterns of multiple objects simultaneously.
- The framework is designed to provide insights into the collective behavior of swarming systems, which could have applications in fields such as ecology, urban planning, and security.
Plain English Explanation
The paper describes a system that can track and analyze the movements of multiple objects in videos captured by drones. The key idea is to use advanced computer vision and machine learning techniques to understand the collective behavior of swarming systems, such as flocks of birds or schools of fish.
By analyzing the movement patterns of these swarming objects from a bird's-eye view, the researchers aim to gain insights into the dynamics of the system. This could be useful in a variety of applications, such as studying animal behavior in the wild, monitoring urban environments, or even enhancing security and surveillance.
The framework proposed in the paper is designed to handle the challenges of tracking multiple objects simultaneously, such as occlusions, variable object sizes, and complex motion patterns. By leveraging advanced algorithms and machine learning models, the system can extract valuable insights from the drone footage that would be difficult for human observers to detect.
Technical Explanation
The paper presents a comprehensive framework for advanced object tracking in drone videos, with a focus on analyzing the dynamics of swarming systems. The key components of the framework include:
-
Object Detection: The system uses deep learning-based object detection models to identify and localize the individual objects within the drone footage. This allows the framework to track the movements of multiple objects simultaneously.
-
Object Tracking: To maintain consistent tracking of the detected objects over time, the framework employs advanced multi-object tracking algorithms. These algorithms leverage techniques such as Kalman filtering and data association to handle challenges like occlusions and object interactions.
-
Swarm Dynamics Analysis: The framework includes modules for analyzing the collective behavior and movement patterns of the tracked objects. This includes quantifying metrics like velocity, acceleration, nearest-neighbor distances, and local alignment, which can provide insights into the underlying swarming dynamics.
-
Visualization and Interaction: The system provides interactive visualizations of the tracked objects and their movement patterns, allowing users to explore and analyze the data in detail. This includes features like trajectory plotting, heat maps, and interactive controls for adjusting the analysis parameters.
The paper demonstrates the effectiveness of the proposed framework through experiments on both synthetic and real-world drone datasets, showing its ability to accurately track and analyze the dynamics of swarming systems. The insights gained from this framework could have important implications for fields such as ecology, urban planning, and security.
Critical Analysis
The paper presents a compelling and well-designed framework for advanced object tracking in drone videos, with a strong focus on analyzing the dynamics of swarming systems. The authors have carefully addressed the key challenges associated with this task, such as occlusions, variable object sizes, and complex motion patterns.
One potential limitation of the approach is the reliance on deep learning-based object detection and tracking models, which can be computationally expensive and require large training datasets. The authors acknowledge this challenge and suggest that future work could explore more efficient algorithms or leverage hardware acceleration to improve the real-time performance of the framework.
Additionally, the paper does not provide a comprehensive evaluation of the framework's performance in real-world scenarios, such as varying environmental conditions or the presence of noise or interference in the drone footage. Further validation of the system's robustness and generalizability would be valuable.
Overall, the proposed framework represents a significant contribution to the field of advanced object tracking and swarming dynamics analysis. The insights gained from this work could have important implications for a wide range of applications, from ecological research to urban planning and security. Continued development and refinement of the framework could lead to even more powerful and versatile tools for understanding and managing complex swarming systems.
Conclusion
This paper presents a comprehensive framework for advanced object tracking in drone videos, with a focus on analyzing the dynamics of swarming systems. The proposed approach leverages state-of-the-art computer vision and machine learning techniques to accurately track and quantify the collective behavior of multiple objects simultaneously.
The insights gained from this framework could have far-reaching implications across a variety of fields, from ecology and urban planning to security and beyond. By providing a powerful tool for understanding the complex dynamics of swarming systems, this work could lead to new discoveries, better-informed decision-making, and innovative solutions to real-world challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Watching Swarm Dynamics from Above: A Framework for Advanced Object Tracking in Drone Videos
Duc Pham, Matthew Hansen, F'elicie Dhellemmens, Jens Krause, Pia Bideau
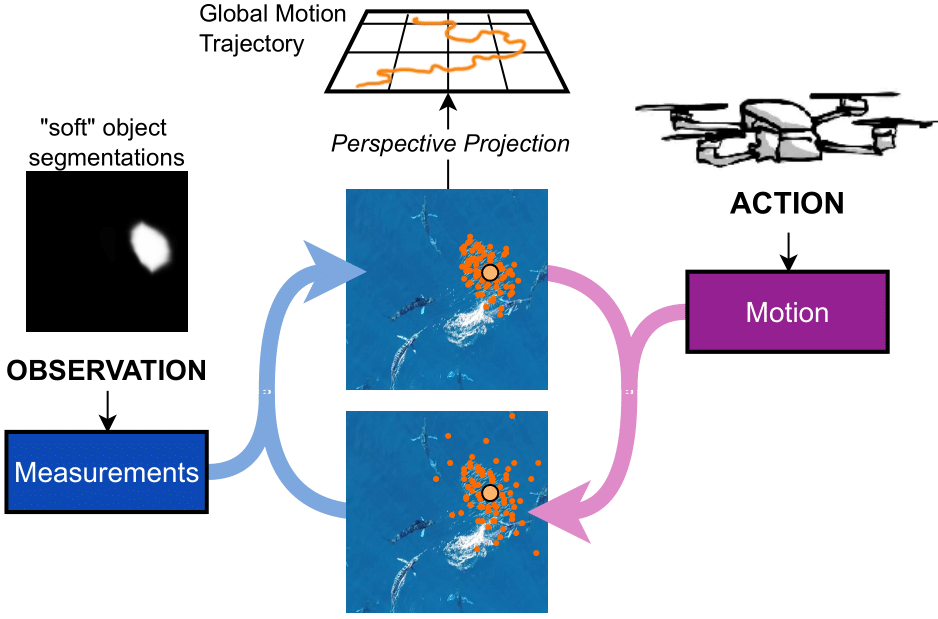
Easily accessible sensors, like drones with diverse onboard sensors, have greatly expanded studying animal behavior in natural environments. Yet, analyzing vast, unlabeled video data, often spanning hours, remains a challenge for machine learning, especially in computer vision. Existing approaches often analyze only a few frames. Our focus is on long-term animal behavior analysis. To address this challenge, we utilize classical probabilistic methods for state estimation, such as particle filtering. By incorporating recent advancements in semantic object segmentation, we enable continuous tracking of rapidly evolving object formations, even in scenarios with limited data availability. Particle filters offer a provably optimal algorithmic structure for recursively adding new incoming information. We propose a novel approach for tracking schools of fish in the open ocean from drone videos. Our framework not only performs classical object tracking in 2D, instead it tracks the position and spatial expansion of the fish school in world coordinates by fusing video data and the drone's on board sensor information (GPS and IMU). The presented framework for the first time allows researchers to study collective behavior of fish schools in its natural social and environmental context in a non-invasive and scalable way.
Read more6/13/2024
⛏️
0
An Autonomous Drone Swarm for Detecting and Tracking Anomalies among Dense Vegetation
Rakesh John Amala Arokia Nathan, Sigrid Strand, Daniel Mehrwald, Dmitriy Shutin, Oliver Bimber
Swarms of drones offer an increased sensing aperture, and having them mimic behaviors of natural swarms enhances sampling by adapting the aperture to local conditions. We demonstrate that such an approach makes detecting and tracking heavily occluded targets practically feasible. While object classification applied to conventional aerial images generalizes poorly the randomness of occlusion and is therefore inefficient even under lightly occluded conditions, anomaly detection applied to synthetic aperture integral images is robust for dense vegetation, such as forests, and is independent of pre-trained classes. Our autonomous swarm searches the environment for occurrences of the unknown or unexpected, tracking them while continuously adapting its sampling pattern to optimize for local viewing conditions. In our real-life field experiments with a swarm of six drones, we achieved an average positional accuracy of 0.39 m with an average precision of 93.2% and an average recall of 95.9%. Here, adapted particle swarm optimization considers detection confidences and predicted target appearance. We show that sensor noise can effectively be included in the synthetic aperture image integration process, removing the need for a computationally costly optimization of high-dimensional parameter spaces. Finally, we present a complete hard- and software framework that supports low-latency transmission (approx. 80 ms round-trip time) and fast processing (approx. 600 ms per formation step) of extensive (70-120 Mbit/s) video and telemetry data, and swarm control for swarms of up to ten drones.
Read more7/16/2024

0
Fish Tracking Challenge 2024: A Multi-Object Tracking Competition with Sweetfish Schooling Data
Makoto M. Itoh, Qingrui Hu, Takayuki Niizato, Hiroaki Kawashima, Keisuke Fujii
The study of collective animal behavior, especially in aquatic environments, presents unique challenges and opportunities for understanding movement and interaction patterns in the field of ethology, ecology, and bio-navigation. The Fish Tracking Challenge 2024 (https://ftc-2024.github.io/) introduces a multi-object tracking competition focused on the intricate behaviors of schooling sweetfish. Using the SweetFish dataset, participants are tasked with developing advanced tracking models to accurately monitor the locations of 10 sweetfishes simultaneously. This paper introduces the competition's background, objectives, the SweetFish dataset, and the appraoches of the 1st to 3rd winners and our baseline. By leveraging video data and bounding box annotations, the competition aims to foster innovation in automatic detection and tracking algorithms, addressing the complexities of aquatic animal movements. The challenge provides the importance of multi-object tracking for discovering the dynamics of collective animal behavior, with the potential to significantly advance scientific understanding in the above fields.
Read more9/4/2024
⚙️
0
Designing A Sustainable Marine Debris Clean-up Framework without Human Labels
Raymond Wang, Nicholas R. Record, D. Whitney King, Tahiya Chowdhury
Marine debris poses a significant ecological threat to birds, fish, and other animal life. Traditional methods for assessing debris accumulation involve labor-intensive and costly manual surveys. This study introduces a framework that utilizes aerial imagery captured by drones to conduct remote trash surveys. Leveraging computer vision techniques, our approach detects, classifies, and maps marine debris distributions. The framework uses Grounding DINO, a transformer-based zero-shot object detector, and CLIP, a vision-language model for zero-shot object classification, enabling the detection and classification of debris objects based on material type without the need for training labels. To mitigate over-counting due to different views of the same object, Scale-Invariant Feature Transform (SIFT) is employed for duplicate matching using local object features. Additionally, we have developed a user-friendly web application that facilitates end-to-end analysis of drone images, including object detection, classification, and visualization on a map to support cleanup efforts. Our method achieves competitive performance in detection (0.69 mean IoU) and classification (0.74 F1 score) across seven debris object classes without labeled data, comparable to state-of-the-art supervised methods. This framework has the potential to streamline automated trash sampling surveys, fostering efficient and sustainable community-led cleanup initiatives.
Read more7/23/2024