Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
2403.02882
0
0
Abstract
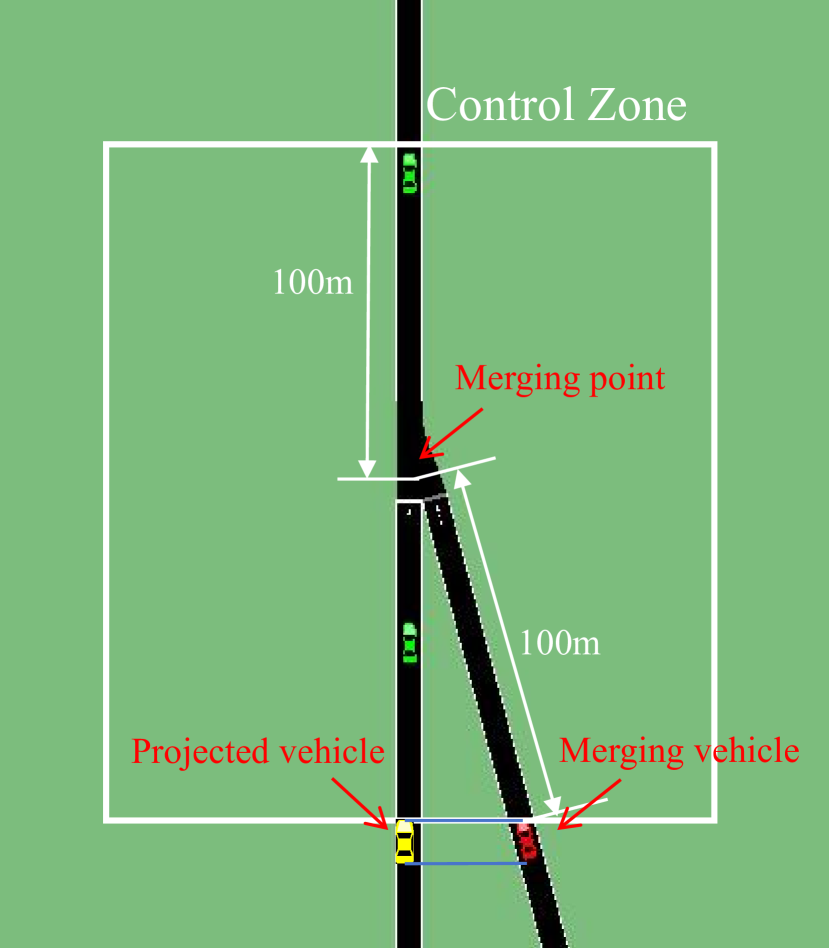
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper discusses microscopic traffic flow models, which aim to simulate the behavior of individual vehicles on the road.
- The authors explore rule-based and machine learning-based approaches to modeling microscopic traffic flow.
- They also investigate the use of these models in various applications, such as autonomous vehicle control and traffic management.
Plain English Explanation
Imagine you're trying to understand how traffic works on a small scale - not just the overall flow of cars, but the behavior of individual vehicles. This is what microscopic traffic flow models are all about. The researchers in this paper looked at two different ways to create these models: rule-based systems and machine learning.
In the rule-based approach, the researchers defined a set of rules to describe how vehicles should behave, like accelerating, braking, and changing lanes. This is similar to how a human driver might intuitively navigate traffic. [link to https://aimodels.fyi/papers/arxiv/human-machine-interaction-automated-vehicles-reducing-voluntary]
On the other hand, the machine learning approach lets the model "learn" how to drive by analyzing real-world traffic data. This can capture more complex and nuanced behaviors that might be difficult to capture with a simple set of rules. [link to https://aimodels.fyi/papers/arxiv/simulation-based-reinforcement-learning-real-world-autonomous]
These microscopic traffic flow models have a lot of potential applications, like helping to control self-driving cars or optimize traffic flow in cities. [link to https://aimodels.fyi/papers/arxiv/model-based-deep-reinforcement-learning-accelerated-learning, https://aimodels.fyi/papers/arxiv/trajectory-planning-autonomous-vehicle-using-iterative-reward]
Technical Explanation
The paper explores two main approaches to modeling microscopic traffic flow: rule-based and machine learning-based.
The rule-based approach defines a set of rules to govern the behavior of individual vehicles, such as acceleration, braking, and lane-changing. These rules are based on factors like the distance to the vehicle in front, the speed of surrounding vehicles, and traffic signals. The authors implemented a rule-based model and validated it against real-world traffic data.
In contrast, the machine learning-based approach uses deep neural networks to learn driving behaviors from large datasets of real-world traffic. The authors trained a reinforcement learning agent to navigate traffic in a simulation environment, then transferred the learned policies to a real-world autonomous vehicle platform. [link to https://aimodels.fyi/papers/arxiv/lasil-learner-aware-supervised-imitation-learning-long]
The paper also discusses the application of these microscopic traffic flow models in various domains, such as autonomous vehicle control, traffic management, and transportation planning. The models can be used to simulate traffic scenarios, optimize vehicle trajectories, and predict traffic patterns.
Critical Analysis
The paper provides a thorough exploration of both rule-based and machine learning-based approaches to microscopic traffic flow modeling. The authors have validated their models against real-world data, demonstrating their practical applicability.
However, the paper does not address the limitations of these approaches. For example, rule-based models may struggle to capture the complexity of human driving behavior, while machine learning models require large amounts of high-quality training data, which may not always be available.
Additionally, the paper does not discuss the potential ethical and societal implications of these models, such as the impact on privacy, job displacement, or the fair distribution of the benefits of autonomous transportation. [link to https://aimodels.fyi/papers/arxiv/human-machine-interaction-automated-vehicles-reducing-voluntary]
Further research could explore ways to combine the strengths of rule-based and machine learning-based approaches, as well as address the broader implications of deploying these models in real-world settings.
Conclusion
This paper presents a comprehensive examination of microscopic traffic flow modeling, exploring both rule-based and machine learning-based approaches. The authors have demonstrated the practical viability of these models and their potential applications in autonomous vehicle control, traffic management, and transportation planning.
While the paper provides valuable insights into the technical aspects of these models, it would benefit from a deeper discussion of their limitations and broader societal implications. Nonetheless, the research showcased in this paper represents an important step forward in the ongoing effort to understand and optimize traffic flow at the individual vehicle level.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Queue-based Eco-Driving at Roundabouts with Reinforcement Learning
Anna-Lena Schlamp, Werner Huber, Stefanie Schmidtner
0
0
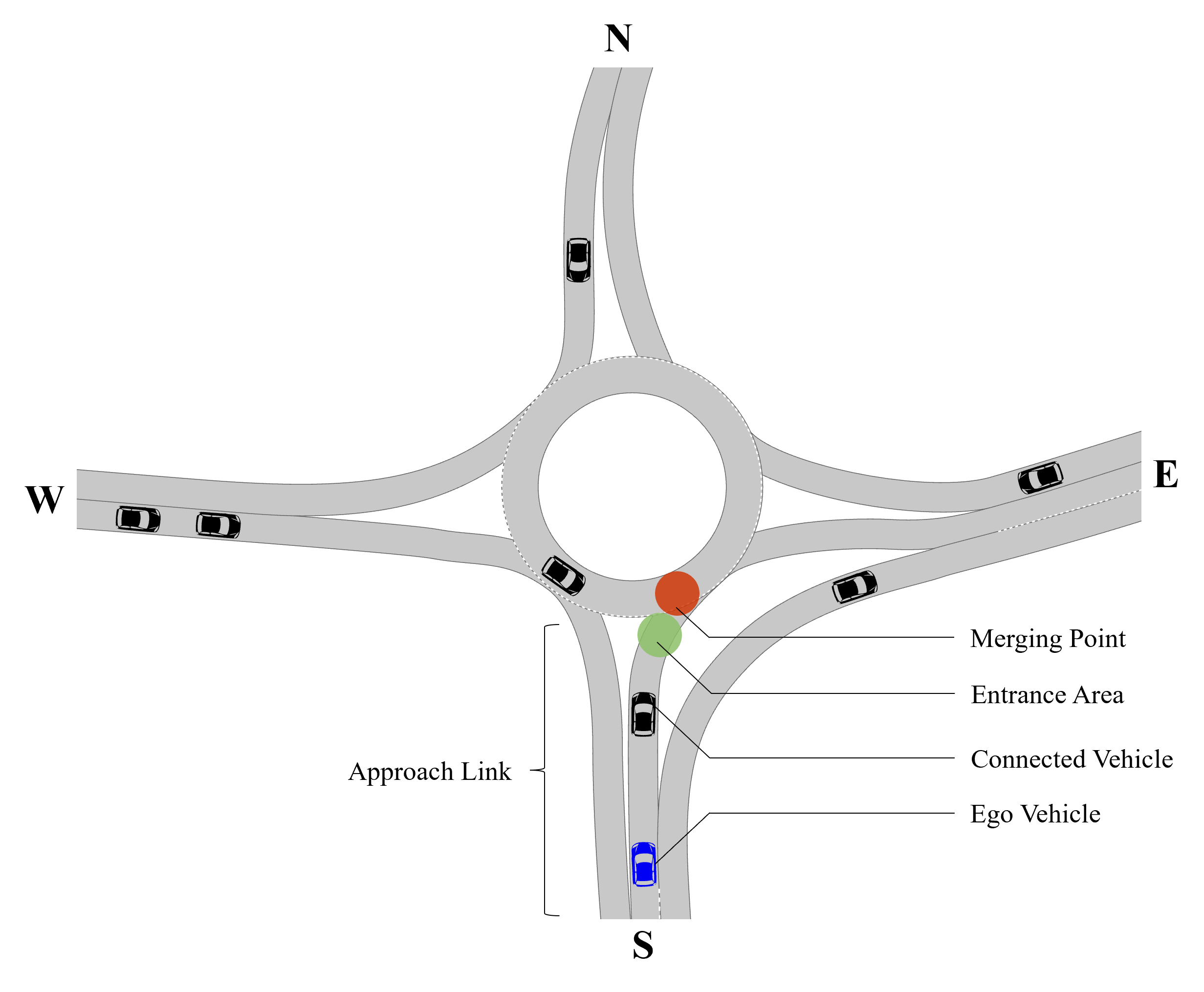
We address eco-driving at roundabouts in mixed traffic to enhance traffic flow and traffic efficiency in urban areas. The aim is to proactively optimize speed of automated or non-automated connected vehicles (CVs), ensuring both an efficient approach and smooth entry into roundabouts. We incorporate the traffic situation ahead, i.e. preceding vehicles and waiting queues. Further, we develop two approaches: a rule-based and an Reinforcement Learning (RL) based eco-driving system, with both using the approach link and information from conflicting CVs for speed optimization. A fair comparison of rule-based and RL-based approaches is performed to explore RL as a viable alternative to classical optimization. Results show that both approaches outperform the baseline. Improvements significantly increase with growing traffic volumes, leading to best results on average being obtained at high volumes. Near capacity, performance deteriorates, indicating limited applicability at capacity limits. Examining different CV penetration rates, a decline in performance is observed, but with substantial results still being achieved at lower CV rates. RL agents can discover effective policies for speed optimization in dynamic roundabout settings, but they do not offer a substantial advantage over classical approaches, especially at higher traffic volumes or lower CV penetration rates.
5/2/2024

Human-Machine Interaction in Automated Vehicles: Reducing Voluntary Driver Intervention
Xinzhi Zhong, Yang Zhou, Varshini Kamaraj, Zhenhao Zhou, Wissam Kontar, Dan Negrut, John D. Lee, Soyoung Ahn
0
0
This paper develops a novel car-following control method to reduce voluntary driver interventions and improve traffic stability in Automated Vehicles (AVs). Through a combination of experimental and empirical analysis, we show how voluntary driver interventions can instigate substantial traffic disturbances that are amplified along the traffic upstream. Motivated by these findings, we present a framework for driver intervention based on evidence accumulation (EA), which describes the evolution of the driver's distrust in automation, ultimately resulting in intervention. Informed through the EA framework, we propose a deep reinforcement learning (DRL)-based car-following control for AVs that is strategically designed to mitigate unnecessary driver intervention and improve traffic stability. Numerical experiments are conducted to demonstrate the effectiveness of the proposed control model.
4/10/2024
🏅
Simulation-based reinforcement learning for real-world autonomous driving
B{l}a.zej Osi'nski, Adam Jakubowski, Piotr Mi{l}o's, Pawe{l} Zik{e}cina, Christopher Galias, Silviu Homoceanu, Henryk Michalewski
0
0
We use reinforcement learning in simulation to obtain a driving system controlling a full-size real-world vehicle. The driving policy takes RGB images from a single camera and their semantic segmentation as input. We use mostly synthetic data, with labelled real-world data appearing only in the training of the segmentation network. Using reinforcement learning in simulation and synthetic data is motivated by lowering costs and engineering effort. In real-world experiments we confirm that we achieved successful sim-to-real policy transfer. Based on the extensive evaluation, we analyze how design decisions about perception, control, and training impact the real-world performance.
4/4/2024
🏅
New!Provable Traffic Rule Compliance in Safe Reinforcement Learning on the Open Sea
Hanna Krasowski, Matthias Althoff
0
0
For safe operation, autonomous vehicles have to obey traffic rules that are set forth in legal documents formulated in natural language. Temporal logic is a suitable concept to formalize such traffic rules. Still, temporal logic rules often result in constraints that are hard to solve using optimization-based motion planners. Reinforcement learning (RL) is a promising method to find motion plans for autonomous vehicles. However, vanilla RL algorithms are based on random exploration and do not automatically comply with traffic rules. Our approach accomplishes guaranteed rule-compliance by integrating temporal logic specifications into RL. Specifically, we consider the application of vessels on the open sea, which must adhere to the Convention on the International Regulations for Preventing Collisions at Sea (COLREGS). To efficiently synthesize rule-compliant actions, we combine predicates based on set-based prediction with a statechart representing our formalized rules and their priorities. Action masking then restricts the RL agent to this set of verified rule-compliant actions. In numerical evaluations on critical maritime traffic situations, our agent always complies with the formalized legal rules and never collides while achieving a high goal-reaching rate during training and deployment. In contrast, vanilla and traffic rule-informed RL agents frequently violate traffic rules and collide even after training.
5/20/2024