Simulation-based reinforcement learning for real-world autonomous driving
1911.12905
0
0
🏅
Abstract
We use reinforcement learning in simulation to obtain a driving system controlling a full-size real-world vehicle. The driving policy takes RGB images from a single camera and their semantic segmentation as input. We use mostly synthetic data, with labelled real-world data appearing only in the training of the segmentation network. Using reinforcement learning in simulation and synthetic data is motivated by lowering costs and engineering effort. In real-world experiments we confirm that we achieved successful sim-to-real policy transfer. Based on the extensive evaluation, we analyze how design decisions about perception, control, and training impact the real-world performance.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- The researchers used reinforcement learning in simulation to develop a driving system for a full-size, real-world vehicle.
- The driving policy takes RGB images from a single camera and their semantic segmentation as input.
- The training data is primarily synthetic, with only the segmentation network being trained on labeled real-world data.
- This approach was chosen to reduce costs and engineering effort.
- Real-world experiments confirmed successful transfer of the simulated driving policy to the physical vehicle.
- The researchers analyzed how design decisions about perception, control, and training impacted the real-world performance.
Plain English Explanation
The researchers developed a driving system for a real-world vehicle using a technique called reinforcement learning. This involved training the system in a simulated environment, where it could practice driving without the risks and costs of using a physical car.
The driving policy, or decision-making algorithm, takes two main inputs: color images from a camera on the car, and a "semantic segmentation" of those images, which identifies different elements like roads, vehicles, and pedestrians. This allows the system to understand the visual environment around the car.
The researchers used mostly synthetic, or computer-generated, data to train the driving policy. They only used a small amount of labeled real-world data to train the segmentation network. This approach was chosen to save time and money, as collecting and annotating real-world driving data can be expensive and time-consuming.
After training the system in simulation, the researchers tested it in the real world and found that the driving policy had successfully transferred from the simulated environment to the physical vehicle. They then analyzed how the specific design choices they made, such as the type of perception and control algorithms used, impacted the system's performance in the real world.
Technical Explanation
The researchers used reinforcement learning in simulation to obtain a driving policy for a full-size, real-world vehicle. The driving policy takes RGB images from a single camera and their semantic segmentation as input. This allows the system to perceive and understand the visual environment around the car.
The training data for the driving policy was predominantly synthetic, with only the segmentation network being trained on labeled real-world data. This sim-to-real approach was chosen to reduce the costs and engineering effort associated with collecting and annotating real-world driving data.
In real-world experiments, the researchers confirmed that the simulated driving policy had successfully transferred to the physical vehicle. They then conducted an extensive evaluation to analyze how design decisions about perception, control, and training impacted the real-world performance of the system.
Critical Analysis
The paper presents a promising approach to developing autonomous driving systems using reinforcement learning and simulation-based training. By relying primarily on synthetic data, the researchers were able to reduce the costs and effort required to collect and annotate real-world driving data, which can be a significant barrier to developing these systems.
However, the paper does not address the potential limitations of this approach, such as the potential for the simulated environment to not accurately capture all the complexities and edge cases of the real world. There may be important factors or situations that are difficult to simulate, which could lead to the driving policy performing poorly when deployed in the real world.
Additionally, the paper does not discuss the potential ethical and safety concerns associated with deploying a reinforcement learning-based driving system in the real world. These systems can be difficult to understand and verify, and there may be concerns about their ability to make safe and ethical decisions in complex, high-stakes situations.
Overall, the research presented in the paper is a valuable contribution to the field of autonomous driving, but further work is needed to address the potential limitations and concerns associated with this approach.
Conclusion
The researchers successfully developed a driving system for a full-size, real-world vehicle using reinforcement learning in simulation. By relying primarily on synthetic data, they were able to reduce the costs and engineering effort required to collect and annotate real-world driving data.
The real-world experiments confirmed that the simulated driving policy had successfully transferred to the physical vehicle, and the researchers were able to analyze how design decisions about perception, control, and training impacted the system's performance.
This research represents an important step towards developing more accessible and scalable autonomous driving systems. However, further work is needed to address the potential limitations and concerns associated with this approach, such as the need to ensure the simulated environment accurately captures the complexities of the real world, and the ethical and safety considerations of deploying these systems in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Dianzhao Li, Ostap Okhrin
0
0
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
5/1/2024
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Haonan Zhao, Yiting Wang, Thomas Bashford-Rogers, Valentina Donzella, Kurt Debattista
0
0
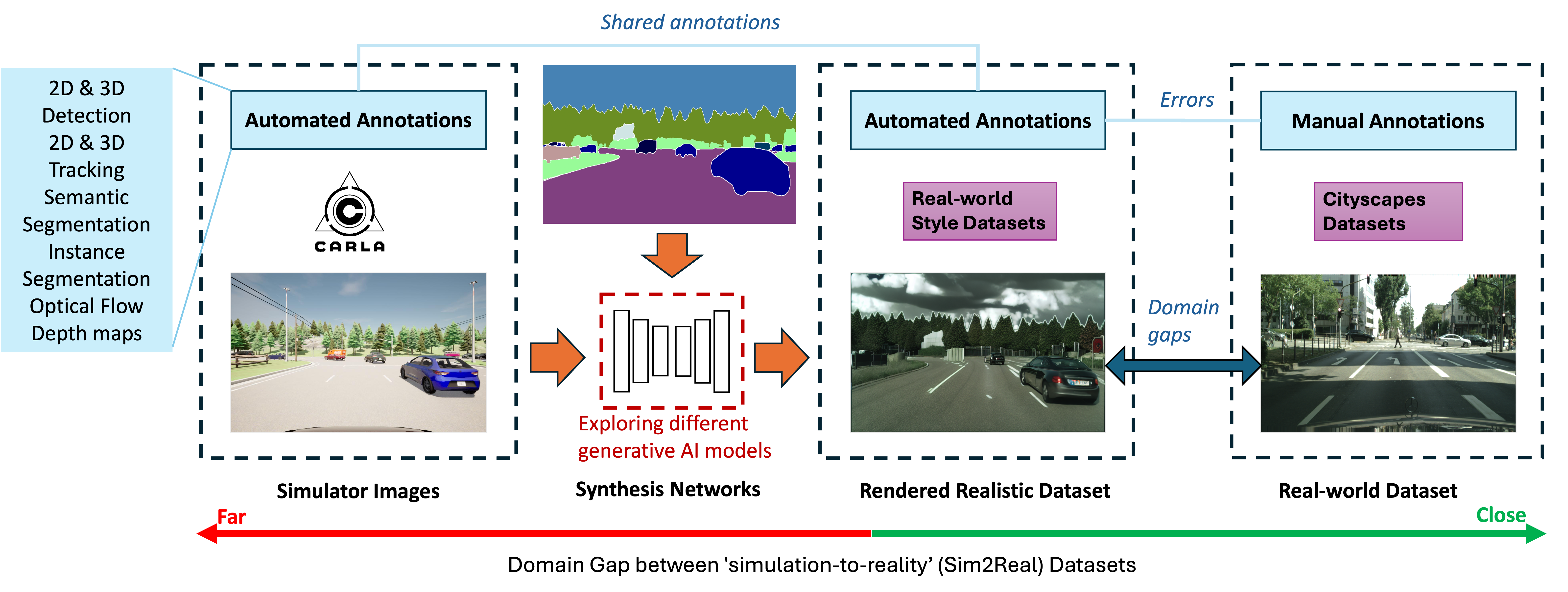
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
4/16/2024

Sim-to-real transfer of active suspension control using deep reinforcement learning
Viktor Wiberg, Erik Wallin, Arvid Falldin, Tobias Semberg, Morgan Rossander, Eddie Wadbro, Martin Servin
0
0
We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform nearly at the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang-bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of predictive planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation.
5/1/2024
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
0
0
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
4/22/2024