Auxiliary-Variable Adaptive Control Barrier Functions for Safety Critical Systems
2304.00372
0
0
🏋️
Abstract
This paper studies safety guarantees for systems with time-varying control bounds. It has been shown that optimizing quadratic costs subject to state and control constraints can be reduced to a sequence of Quadratic Programs (QPs) using Control Barrier Functions (CBFs). One of the main challenges in this method is that the CBF-based QP could easily become infeasible under tight control bounds, especially when the control bounds are time-varying. The recently proposed adaptive CBFs have addressed such infeasibility issues, but require extensive and non-trivial hyperparameter tuning for the CBF-based QP and may introduce overshooting control near the boundaries of safe sets. To address these issues, we propose a new type of adaptive CBFs called Auxiliary-Variable Adaptive CBFs (AVCBFs). Specifically, we introduce an auxiliary variable that multiplies each CBF itself, and define dynamics for the auxiliary variable to adapt it in constructing the corresponding CBF constraint. In this way, we can improve the feasibility of the CBF-based QP while avoiding extensive parameter tuning with non-overshooting control since the formulation is identical to classical CBF methods. We demonstrate the advantages of using AVCBFs and compare them with existing techniques on an Adaptive Cruise Control (ACC) problem with time-varying control bounds.
Create account to get full access
Overview
- This paper studies how to ensure safety guarantees for systems with time-varying control bounds.
- It builds on the use of Control Barrier Functions (CBFs) to optimize quadratic costs subject to state and control constraints, which can be reduced to a sequence of Quadratic Programs (QPs).
- One challenge with this approach is that the CBF-based QP can become infeasible under tight, time-varying control bounds.
- The paper proposes a new type of adaptive CBFs called Auxiliary-Variable Adaptive CBFs (AVCBFs) to address this issue.
Plain English Explanation
This paper looks at how to keep systems safe even when the limits on their controls (like speed or torque) change over time. Previous work has shown that you can optimize performance while staying safe by using Control Barrier Functions (CBFs) to set up a series of optimization problems. However, the optimization can become impossible to solve when the control limits are very tight, especially if they change over time.
To fix this, the researchers developed a new type of adaptive CBF called Auxiliary-Variable Adaptive CBFs (AVCBFs). The key idea is to introduce an extra variable that adjusts the CBF constraint, allowing the optimization to find a solution even with strict, time-varying control limits. This avoids the need for extensive manual tuning of parameters, and also prevents the controls from overshooting the safe region near the boundaries.
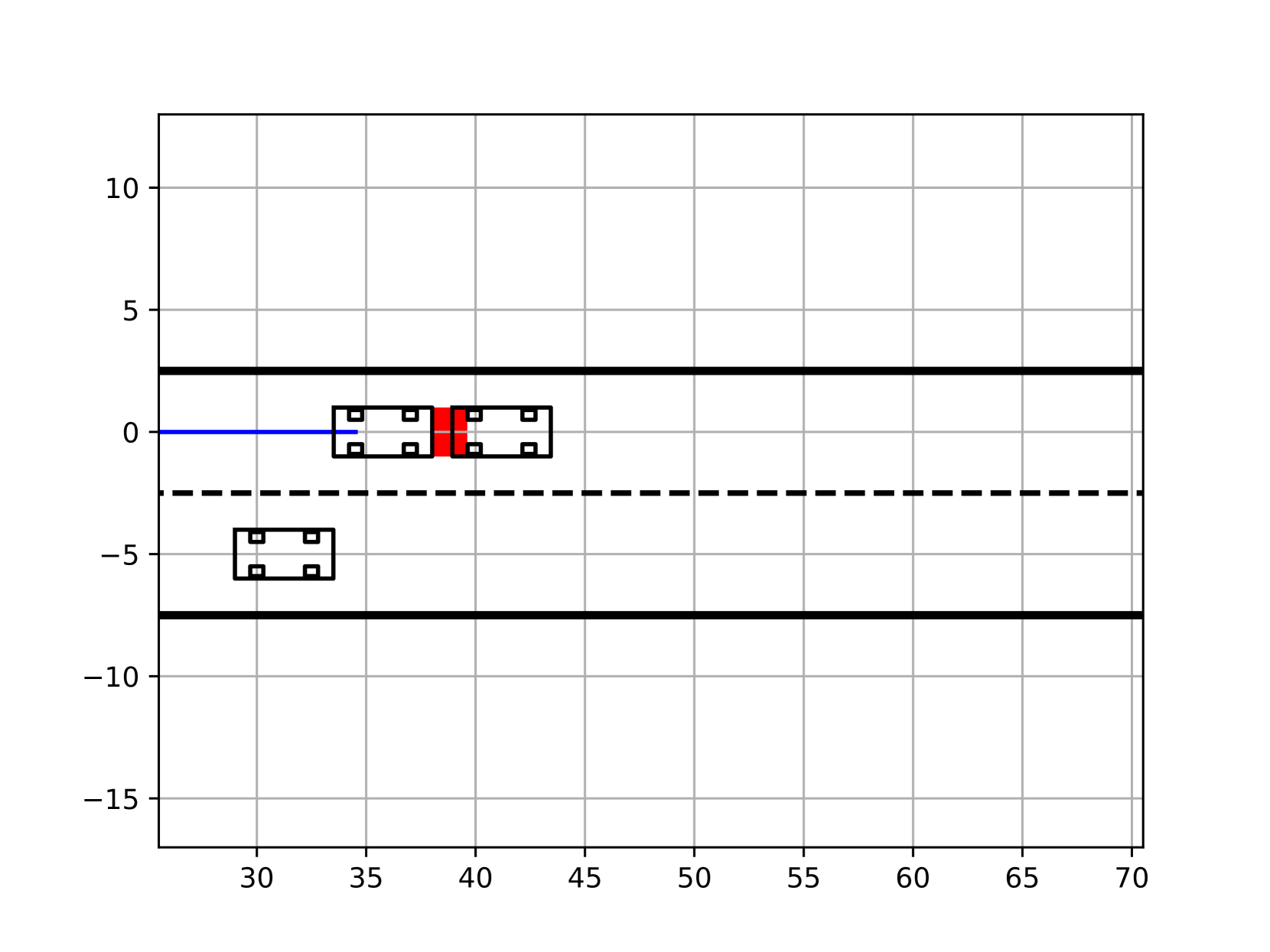
The researchers demonstrate the benefits of AVCBFs by applying them to an Adaptive Cruise Control (ACC) problem, where the vehicle needs to adjust its speed while respecting time-varying limits.
Technical Explanation
The paper builds on prior work using Control Barrier Functions (CBFs) to optimize quadratic costs subject to state and control constraints. This allows the optimization to be reduced to a sequence of Quadratic Programs (QPs).
One challenge with this CBF-based QP approach is that the optimization can become infeasible when the control bounds are tight, especially if they vary over time. Prior work on adaptive CBFs has addressed this, but requires careful tuning of hyperparameters and can still lead to overshooting control near the safe set boundaries.
To overcome these issues, the authors propose Auxiliary-Variable Adaptive CBFs (AVCBFs). The key idea is to introduce an auxiliary variable that multiplies each CBF constraint, and define dynamics for this variable to adapt it and improve the QP feasibility. This allows the optimization to find a solution without the need for extensive parameter tuning, while also avoiding overshooting behavior.
The authors demonstrate the advantages of AVCBFs on an Adaptive Cruise Control (ACC) problem with time-varying control bounds. This builds on prior work on robot safe planning in dynamic environments and learning robust control barrier functions.
Critical Analysis
The paper makes a valuable contribution by proposing a new adaptive CBF formulation to address the issue of infeasible QPs under tight, time-varying control bounds. The AVCBF approach seems promising, as it avoids the need for extensive hyperparameter tuning and the potential for overshooting behavior near safe set boundaries.
However, the paper does not provide a thorough analysis of the limitations or potential failure modes of the AVCBF approach. For example, it would be helpful to understand how the method performs under more extreme or adversarial variations in the control bounds, or how sensitive the results are to the choice of the auxiliary variable dynamics.
Additionally, while the ACC case study is a useful demonstration, it would be valuable to see the AVCBF approach applied to a broader range of safety-critical systems to better understand its generalizability and robustness.
Overall, this is a strong technical contribution, but further research is needed to fully characterize the strengths and weaknesses of the AVCBF framework.
Conclusion
This paper presents a new type of adaptive Control Barrier Function, called Auxiliary-Variable Adaptive CBFs (AVCBFs), to address the challenge of maintaining safety guarantees in systems with time-varying control bounds. By introducing an auxiliary variable that adapts the CBF constraints, the AVCBF approach can improve the feasibility of the underlying optimization problem without requiring extensive hyperparameter tuning or introducing overshooting control behavior.
The demonstrated benefits of AVCBFs on an Adaptive Cruise Control problem suggest that this technique could be a valuable tool for ensuring the safe operation of a wide range of safety-critical systems. Further research to fully characterize the strengths and limitations of the AVCBF framework would help solidify its potential impact on the field of synthesis and verification of robust, adaptive, and safe controllers.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Constructive Safety-Critical Control: Synthesizing Control Barrier Functions for Partially Feedback Linearizable Systems
Max H. Cohen, Ryan K. Cosner, Aaron D. Ames
0
0
Certifying the safety of nonlinear systems, through the lens of set invariance and control barrier functions (CBFs), offers a powerful method for controller synthesis, provided a CBF can be constructed. This paper draws connections between partial feedback linearization and CBF synthesis. We illustrate that when a control affine system is input-output linearizable with respect to a smooth output function, then, under mild regularity conditions, one may extend any safety constraint defined on the output to a CBF for the full-order dynamics. These more general results are specialized to robotic systems where the conditions required to synthesize CBFs simplify. The CBFs constructed from our approach are applied and verified in simulation and hardware experiments on a quadrotor.
6/6/2024
➖
Synthesis and verification of robust-adaptive safe controllers
Simin Liu, Kai S. Yun, John M. Dolan, Changliu Liu
0
0
Safe control with guarantees generally requires the system model to be known. It is far more challenging to handle systems with uncertain parameters. In this paper, we propose a generic algorithm that can synthesize and verify safe controllers for systems with constant, unknown parameters. In particular, we use robust-adaptive control barrier functions (raCBFs) to achieve safety. We develop new theories and techniques using sum-of-squares that enable us to pose synthesis and verification as a series of convex optimization problems. In our experiments, we show that our algorithms are general and scalable, applying them to three different polynomial systems of up to moderate size (7D). Our raCBFs are currently the most effective way to guarantee safety for uncertain systems, achieving 100% safety and up to 55% performance improvement over a robust baseline.
4/4/2024
Learning Piecewise Residuals of Control Barrier Functions for Safety of Switching Systems using Multi-Output Gaussian Processes
Mohammad Aali, Jun Liu
0
0
Control barrier functions (CBFs) have recently been introduced as a systematic tool to ensure safety by establishing set invariance. When combined with a control Lyapunov function (CLF), they form a safety-critical control mechanism. However, the effectiveness of CBFs and CLFs is closely tied to the system model. In practice, model uncertainty can jeopardize safety and stability guarantees and may lead to undesirable performance. In this paper, we develop a safe learning-based control strategy for switching systems in the face of uncertainty. We focus on the case that a nominal model is available for a true underlying switching system. This uncertainty results in piecewise residuals for each switching surface, impacting the CLF and CBF constraints. We introduce a batch multi-output Gaussian process (MOGP) framework to approximate these piecewise residuals, thereby mitigating the adverse effects of uncertainty. A particular structure of the covariance function enables us to convert the MOGP-based chance constraints CLF and CBF into second-order cone constraints, which leads to a convex optimization. We analyze the feasibility of the resulting optimization and provide the necessary and sufficient conditions for feasibility. The effectiveness of the proposed strategy is validated through a simulation of a switching adaptive cruise control system.
4/22/2024

Using Dynamic Safety Margins as Control Barrier Functions
Victor Freire, Marco M. Nicotra
0
0
This paper provides an approach to design control barrier functions (CBFs) using the notion of dynamic safety margins (DSMs). In particular, it is shown that DSMs are CBFs for an augmented system. The proposed approach can handle multiple state and input constraints using the control-sharing property of CBFs. Moreover, it makes no assumption on the relative degree of the constraints. Numerical simulations show that the method outperforms existing DSM-based approaches, while also guaranteeing safety and recursive feasibility.
4/3/2024