Learning Piecewise Residuals of Control Barrier Functions for Safety of Switching Systems using Multi-Output Gaussian Processes
2403.18041
0
0
Abstract
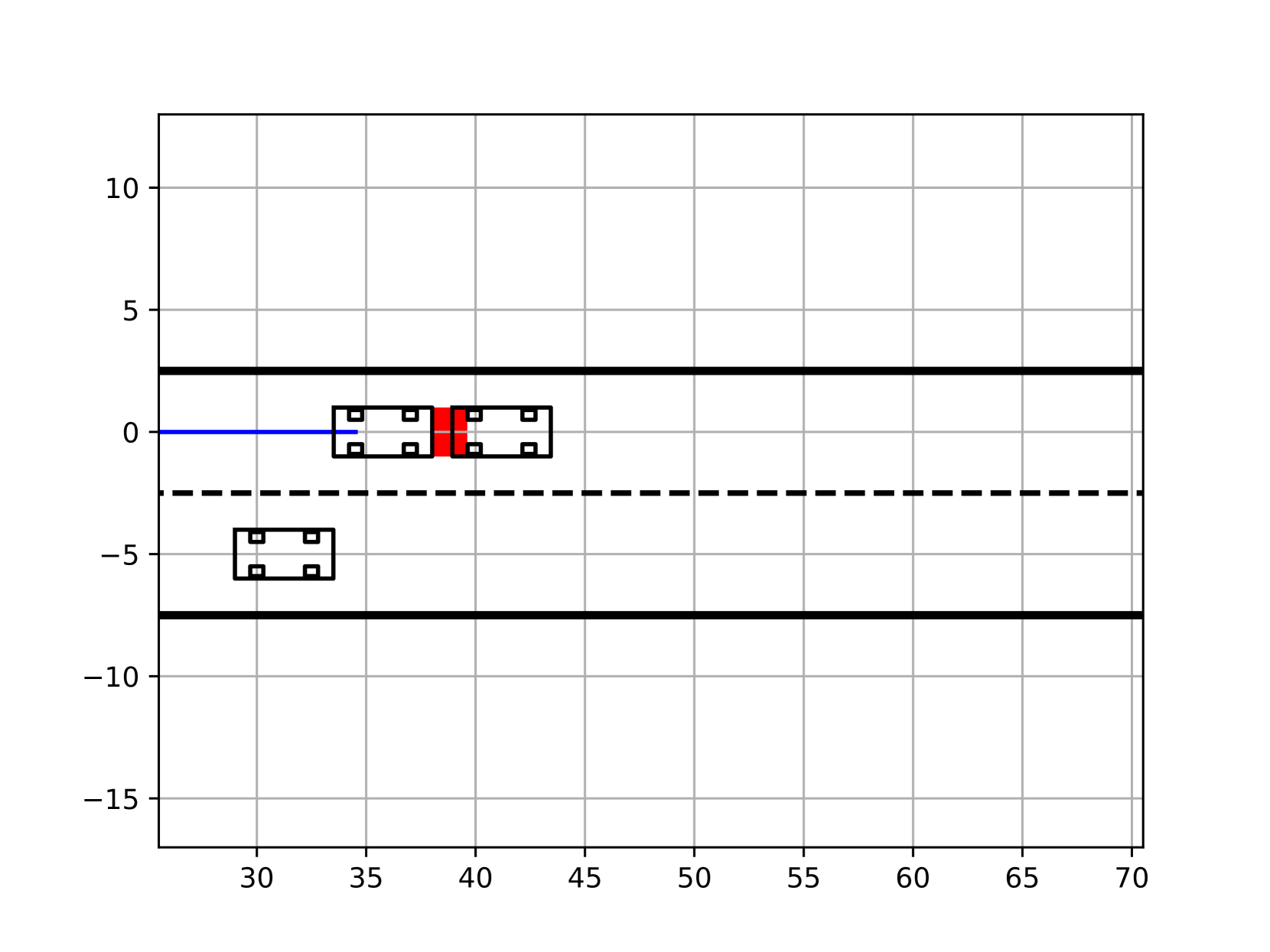
Control barrier functions (CBFs) have recently been introduced as a systematic tool to ensure safety by establishing set invariance. When combined with a control Lyapunov function (CLF), they form a safety-critical control mechanism. However, the effectiveness of CBFs and CLFs is closely tied to the system model. In practice, model uncertainty can jeopardize safety and stability guarantees and may lead to undesirable performance. In this paper, we develop a safe learning-based control strategy for switching systems in the face of uncertainty. We focus on the case that a nominal model is available for a true underlying switching system. This uncertainty results in piecewise residuals for each switching surface, impacting the CLF and CBF constraints. We introduce a batch multi-output Gaussian process (MOGP) framework to approximate these piecewise residuals, thereby mitigating the adverse effects of uncertainty. A particular structure of the covariance function enables us to convert the MOGP-based chance constraints CLF and CBF into second-order cone constraints, which leads to a convex optimization. We analyze the feasibility of the resulting optimization and provide the necessary and sufficient conditions for feasibility. The effectiveness of the proposed strategy is validated through a simulation of a switching adaptive cruise control system.
Create account to get full access
Overview
- This paper proposes a method for learning piecewise residuals of control barrier functions to ensure the safety of switching systems using multi-output Gaussian processes.
- The key idea is to model the residual between the true safety constraints and an approximate control barrier function using Gaussian processes, allowing for more flexible and accurate modeling of safety boundaries.
- The approach is demonstrated on a set of simulated scenarios involving switching systems, showing improved safety guarantees compared to prior methods.
Plain English Explanation
In this paper, the researchers developed a new way to ensure the safety of complex systems that can switch between different modes of operation, such as a robot navigating through a dynamic environment. Proper markdown link to "Using Dynamic Safety Margins as Control Barrier Functions for Safe Robot Planning in Dynamic Environments"
The core challenge is that the safety constraints for these switching systems can be difficult to model precisely, leading to potential safety violations. To address this, the researchers proposed using Gaussian processes, a powerful machine learning technique, to learn the "residual" - or difference - between the true safety constraints and an approximate model called a control barrier function. Proper markdown link to "Learning Robust Output Control Barrier Functions"
By modeling this residual, the system can adapt and learn the true safety boundaries, which can be more complex and irregular than the approximate model. This allows for better safety guarantees, even in situations where the system is switching between different modes of operation.
The researchers demonstrated their approach on a set of simulated scenarios, showing that it outperformed previous methods in maintaining safety. This work could be important for developing safe and reliable control systems for robots, self-driving cars, and other complex systems that need to navigate dynamic, unpredictable environments. Proper markdown link to "Robot Safe Planning in Dynamic Environments Based on Model Predictive Control with Gaussian Process"
Technical Explanation
The paper presents a method for learning piecewise residuals of control barrier functions using multi-output Gaussian processes to ensure the safety of switching systems. Proper markdown link to "Auxiliary Variable-Based Adaptive Control Barrier Functions for Safety-Critical Systems"
The key idea is to model the residual between the true safety constraints and an approximate control barrier function (CBF) using Gaussian processes. This allows for more flexible and accurate modeling of the safety boundaries, which can be important for complex switching systems where the true constraints may not be well-captured by a simple CBF.
The approach works as follows:
- An initial CBF is constructed to provide a base-level safety guarantee.
- A multi-output Gaussian process is then used to model the residual between the true safety constraints and the CBF.
- This residual model is used to adaptively refine the CBF, allowing it to better match the true safety boundaries.
The researchers evaluate their method on a set of simulated switching system scenarios, including a quadrotor navigation task and a car driving example. They show that their approach can achieve better safety guarantees compared to using a fixed CBF or other baseline methods.
The paper also discusses some of the limitations and open challenges, such as the need for accurate models of the system dynamics and the potential for overfitting when learning the residual. Overall, this work represents an interesting advance in ensuring the safety of complex, switching control systems.
Critical Analysis
The paper presents a compelling approach for improving the safety of switching systems by learning more expressive control barrier function models using Gaussian processes. The key strength is the ability to adaptively capture complex safety boundaries that may not be well-represented by a simple, fixed CBF.
However, there are some potential limitations and areas for further research that could be explored. First, the approach relies on accurate models of the system dynamics, which may not always be available, especially for complex real-world systems. Integrating this method with techniques for learning system dynamics Proper markdown link to "Robot Safe Planning in Dynamic Environments Based on Model Predictive Control with Gaussian Process" could be an interesting direction.
Additionally, while the Gaussian process modeling allows for more flexibility, there is a risk of overfitting to the training data, which could lead to overconfident safety estimates. Investigating techniques for regularization and uncertainty quantification could help address this concern.
Finally, the paper focuses on simulated scenarios, and further validation on real-world systems would be valuable to assess the practical applicability and potential challenges. Exploring how this approach might be integrated with other safe control methods, such as those using adaptive or robust CBFs Proper markdown link to "Auxiliary Variable-Based Adaptive Control Barrier Functions for Safety-Critical Systems", could also be a fruitful area for future research.
Overall, this work represents an interesting and promising step towards safer switching control systems, and the ideas presented could have important implications for the development of advanced autonomous systems.
Conclusion
This paper proposes a novel method for learning piecewise residuals of control barrier functions using multi-output Gaussian processes to ensure the safety of switching systems. The key innovation is the ability to adaptively model complex safety boundaries that may not be well-captured by a simple, fixed control barrier function.
The researchers demonstrate the effectiveness of their approach on a set of simulated scenarios, showing that it can achieve better safety guarantees compared to previous methods. While the approach relies on accurate system models and has the potential risk of overfitting, the ideas presented in this work could have important implications for the development of safe and reliable control systems for a wide range of applications, including robotics, autonomous vehicles, and other complex, safety-critical systems.
Overall, this paper represents an interesting and valuable contribution to the field of safe control for switching systems, and the proposed techniques could inspire further research and development in this important area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⛏️
New!Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Chuyuan Tao, Wenbin Wan, Junjie Gao, Bihao Mo, Hunmin Kim, Naira Hovakimyan
0
0
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
7/2/2024
🏋️
Learning Robust Output Control Barrier Functions from Safe Expert Demonstrations
Lars Lindemann, Alexander Robey, Lejun Jiang, Satyajeet Das, Stephen Tu, Nikolai Matni
0
0
This paper addresses learning safe output feedback control laws from partial observations of expert demonstrations. We assume that a model of the system dynamics and a state estimator are available along with corresponding error bounds, e.g., estimated from data in practice. We first propose robust output control barrier functions (ROCBFs) as a means to guarantee safety, as defined through controlled forward invariance of a safe set. We then formulate an optimization problem to learn ROCBFs from expert demonstrations that exhibit safe system behavior, e.g., data collected from a human operator or an expert controller. When the parametrization of the ROCBF is linear, then we show that, under mild assumptions, the optimization problem is convex. Along with the optimization problem, we provide verifiable conditions in terms of the density of the data, smoothness of the system model and state estimator, and the size of the error bounds that guarantee validity of the obtained ROCBF. Towards obtaining a practical control algorithm, we propose an algorithmic implementation of our theoretical framework that accounts for assumptions made in our framework in practice. We validate our algorithm in the autonomous driving simulator CARLA and demonstrate how to learn safe control laws from simulated RGB camera images.
4/4/2024

New!DADEE: Well-calibrated uncertainty quantification in neural networks for barriers-based robot safety
Masoud Ataei, Vikas Dhiman
0
0
Uncertainty-aware controllers that guarantee safety are critical for safety critical applications. Among such controllers, Control Barrier Functions (CBFs) based approaches are popular because they are fast, yet safe. However, most such works depend on Gaussian Processes (GPs) or MC-Dropout for learning and uncertainty estimation, and both approaches come with drawbacks: GPs are non-parametric methods that are slow, while MC-Dropout does not capture aleatoric uncertainty. On the other hand, modern Bayesian learning algorithms have shown promise in uncertainty quantification. The application of modern Bayesian learning methods to CBF-based controllers has not yet been studied. We aim to fill this gap by surveying uncertainty quantification algorithms and evaluating them on CBF-based safe controllers. We find that model variance-based algorithms (for example, Deep ensembles, MC-dropout, etc.) and direct estimation-based algorithms (such as DEUP) have complementary strengths. Algorithms in the former category can only estimate uncertainty accurately out-of-domain, while those in the latter category can only do so in-domain. We combine the two approaches to obtain more accurate uncertainty estimates both in- and out-of-domain. As measured by the failure rate of a simulated robot, this results in a safer CBF-based robot controller.
7/2/2024

Verification and Synthesis of Compatible Control Lyapunov and Control Barrier Functions
Hongkai Dai, Chuanrui Jiang, Hongchao Zhang, Andrew Clark
0
0
Safety and stability are essential properties of control systems. Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) have been proposed to ensure safety and stability respectively. However, previous approaches typically verify and synthesize the CBFs and CLFs separately, satisfying their respective constraints, without proving that the CBFs and CLFs are compatible with each other, namely at every state, there exists control actions that satisfy both the CBF and CLF constraints simultaneously. There exists some recent works that synthesized compatible CLF and CBF, but relying on nominal polynomial or rational controllers, which is just a sufficient but not necessary condition for compatibility. In this work, we investigate verification and synthesis of compatible CBF and CLF independent from any nominal controllers. We derive exact necessary and sufficient conditions for compatibility, and further formulate Sum-Of-Squares program for the compatibility verification. Based on our verification framework, we also design an alternating nominal-controller-free synthesis method. We evaluate our method in a linear toy, a non-linear toy, and a power converter example.
6/28/2024