A Bayesian Approach to Online Planning
2406.02103
0
0
Abstract
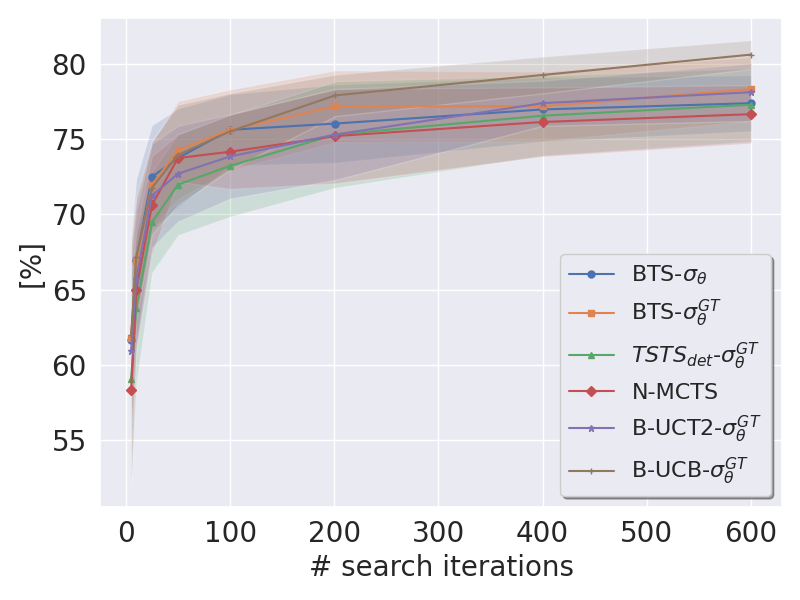
The combination of Monte Carlo tree search and neural networks has revolutionized online planning. As neural network approximations are often imperfect, we ask whether uncertainty estimates about the network outputs could be used to improve planning. We develop a Bayesian planning approach that facilitates such uncertainty quantification, inspired by classical ideas from the meta-reasoning literature. We propose a Thompson sampling based algorithm for searching the tree of possible actions, for which we prove the first (to our knowledge) finite time Bayesian regret bound, and propose an efficient implementation for a restricted family of posterior distributions. In addition we propose a variant of the Bayes-UCB method applied to trees. Empirically, we demonstrate that on the ProcGen Maze and Leaper environments, when the uncertainty estimates are accurate but the neural network output is inaccurate, our Bayesian approach searches the tree much more effectively. In addition, we investigate whether popular uncertainty estimation methods are accurate enough to yield significant gains in planning. Our code is available at: https://github.com/nirgreshler/bayesian-online-planning.
Create account to get full access
Overview
- This research paper presents a Bayesian approach to online planning, which aims to make decisions under uncertainty by updating beliefs about the environment and actions.
- The method uses a Bayesian framework to model the planning problem, incorporating prior knowledge and updating beliefs as new information is observed.
- This allows the system to reason about the uncertainty in the environment and select actions that balance exploration and exploitation.
Plain English Explanation
In the real world, we often have to make decisions without knowing all the details about the situation. This is called "planning under uncertainty." The paper describes a new way to approach this problem using a Bayesian framework.
Bayesian methods allow the system to start with some initial beliefs (called "prior knowledge") about how the world works. As the system observes new information, it can update these beliefs in a principled way, using mathematics to determine the probability of different outcomes.
For example, imagine you're trying to find the best path through a maze. You might start with some general ideas about maze structure, but as you explore the maze, you'll learn more about the layout and can adjust your beliefs accordingly. A Bayesian planner would do this in a systematic way, weighing the uncertainty in the environment and choosing actions that balance exploration (learning more about the maze) and exploitation (taking the best path based on current knowledge).
This approach has several benefits:
- It can handle uncertainty more robustly than traditional planning methods.
- It can adapt its behavior as it gains more information about the environment.
- It provides a principled way to reason about the tradeoffs between exploration and exploitation.
Overall, this Bayesian online planning method offers a flexible and powerful way to make decisions in complex, uncertain environments.
Technical Explanation
The paper proposes a Bayesian approach to online planning, where the planning problem is modeled as a Markov Decision Process (MDP) with unknown transition dynamics. The key idea is to maintain a posterior distribution over the transition dynamics, which is updated based on the agent's interactions with the environment.
The authors use a factored representation of the transition dynamics, with separate Bayesian models for each state-action pair. This allows for efficient updates of the posterior distribution as new observations are made. The planning problem is then solved by optimizing the expected value of the future rewards, taking into account the uncertainty in the transition dynamics.
The paper demonstrates the effectiveness of the Bayesian online planning approach on several benchmark tasks, including the classic mountain car problem and a simulated robot navigation task. The results show that the Bayesian planner outperforms traditional planning methods, especially in situations with high uncertainty.
The authors also discuss several extensions and variations of the Bayesian online planning framework, including the use of Gaussian processes to model the transition dynamics and the incorporation of additional prior knowledge about the problem structure.
Critical Analysis
The Bayesian online planning approach presented in the paper offers a principled and flexible way to handle uncertainty in decision-making tasks. By maintaining a posterior distribution over the transition dynamics, the system can adaptively update its beliefs and make more informed decisions as new information is observed.
One potential limitation of the approach is the computational complexity, as maintaining and updating the Bayesian models for each state-action pair can be computationally intensive, especially in large-scale problems. The authors mention some strategies to address this, such as using factored representations and efficient inference algorithms, but the scalability of the method may still be a concern in some applications.
Additionally, the paper focuses on the theoretical framework and experimental evaluation, but does not discuss the potential challenges in real-world deployment or the impact of the Bayesian online planning approach on human-AI interaction and trust. Exploring these practical considerations could be an interesting direction for future research.
Overall, the Bayesian online planning approach presented in the paper is a promising direction for handling uncertainty in decision-making, and the insights and techniques developed in this work could be valuable for researchers and practitioners working on related topics, uncertainty quantification, probabilistic modeling, and Bayesian optimization.
Conclusion
The paper introduces a Bayesian approach to online planning, which aims to make decisions under uncertainty by maintaining and updating beliefs about the environment and actions. This framework allows the system to reason about the uncertainty in the environment and select actions that balance exploration and exploitation.
The key innovation of this work is the use of Bayesian models to represent the transition dynamics, enabling the system to adapt its behavior as it gains more information about the world. The experimental results demonstrate the effectiveness of this approach, particularly in situations with high uncertainty.
While the computational complexity of the Bayesian models may be a practical concern in some applications, the insights and techniques developed in this paper could have significant implications for the field of planning under uncertainty, with potential applications in robotics, decision-making systems, and other domains where making informed choices in the face of incomplete information is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
Bayesian Exploration Networks
Mattie Fellows, Brandon Kaplowitz, Christian Schroeder de Witt, Shimon Whiteson
0
0
Bayesian reinforcement learning (RL) offers a principled and elegant approach for sequential decision making under uncertainty. Most notably, Bayesian agents do not face an exploration/exploitation dilemma, a major pathology of frequentist methods. However theoretical understanding of model-free approaches is lacking. In this paper, we introduce a novel Bayesian model-free formulation and the first analysis showing that model-free approaches can yield Bayes-optimal policies. We show all existing model-free approaches make approximations that yield policies that can be arbitrarily Bayes-suboptimal. As a first step towards model-free Bayes optimality, we introduce the Bayesian exploration network (BEN) which uses normalising flows to model both the aleatoric uncertainty (via density estimation) and epistemic uncertainty (via variational inference) in the Bellman operator. In the limit of complete optimisation, BEN learns true Bayes-optimal policies, but like in variational expectation-maximisation, partial optimisation renders our approach tractable. Empirical results demonstrate that BEN can learn true Bayes-optimal policies in tasks where existing model-free approaches fail.
6/4/2024

Learning Online Belief Prediction for Efficient POMDP Planning in Autonomous Driving
Zhiyu Huang, Chen Tang, Chen Lv, Masayoshi Tomizuka, Wei Zhan
0
0
Effective decision-making in autonomous driving relies on accurate inference of other traffic agents' future behaviors. To achieve this, we propose an online belief-update-based behavior prediction model and an efficient planner for Partially Observable Markov Decision Processes (POMDPs). We develop a Transformer-based prediction model, enhanced with a recurrent neural memory model, to dynamically update latent belief state and infer the intentions of other agents. The model can also integrate the ego vehicle's intentions to reflect closed-loop interactions among agents, and it learns from both offline data and online interactions. For planning, we employ a Monte-Carlo Tree Search (MCTS) planner with macro actions, which reduces computational complexity by searching over temporally extended action steps. Inside the MCTS planner, we use predicted long-term multi-modal trajectories to approximate future updates, which eliminates iterative belief updating and improves the running efficiency. Our approach also incorporates deep Q-learning (DQN) as a search prior, which significantly improves the performance of the MCTS planner. Experimental results from simulated environments validate the effectiveness of our proposed method. The online belief update model can significantly enhance the accuracy and temporal consistency of predictions, leading to improved decision-making performance. Employing DQN as a search prior in the MCTS planner considerably boosts its performance and outperforms an imitation learning-based prior. Additionally, we show that the MCTS planning with macro actions substantially outperforms the vanilla method in terms of performance and efficiency.
6/19/2024
Learning Solutions of Stochastic Optimization Problems with Bayesian Neural Networks
Alan A. Lahoud, Erik Schaffernicht, Johannes A. Stork
0
0
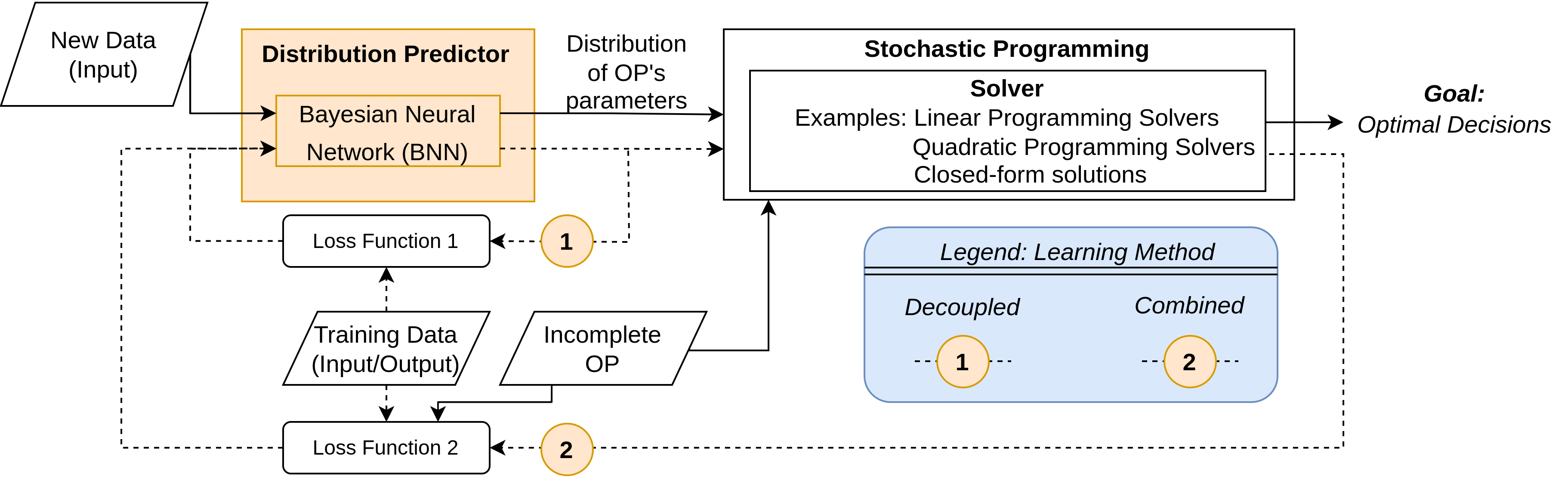
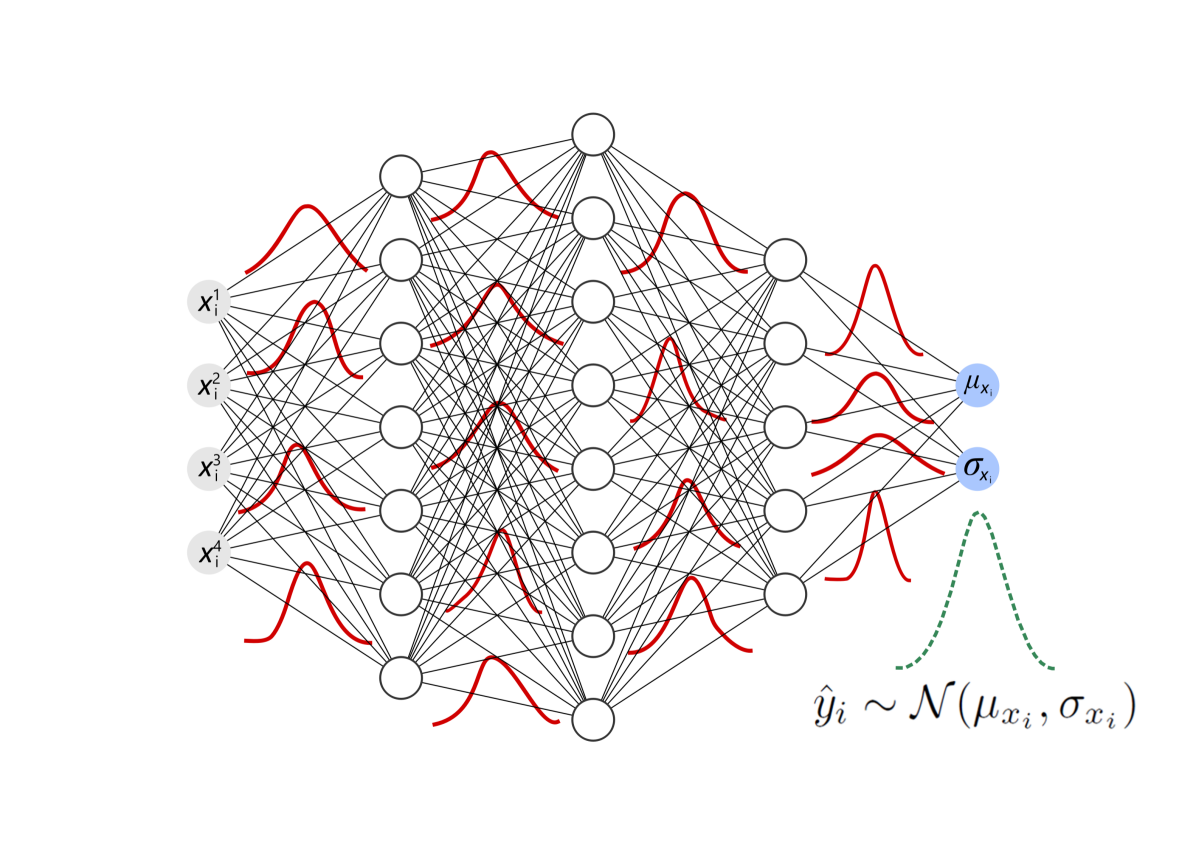
Mathematical solvers use parametrized Optimization Problems (OPs) as inputs to yield optimal decisions. In many real-world settings, some of these parameters are unknown or uncertain. Recent research focuses on predicting the value of these unknown parameters using available contextual features, aiming to decrease decision regret by adopting end-to-end learning approaches. However, these approaches disregard prediction uncertainty and therefore make the mathematical solver susceptible to provide erroneous decisions in case of low-confidence predictions. We propose a novel framework that models prediction uncertainty with Bayesian Neural Networks (BNNs) and propagates this uncertainty into the mathematical solver with a Stochastic Programming technique. The differentiable nature of BNNs and differentiable mathematical solvers allow for two different learning approaches: In the Decoupled learning approach, we update the BNN weights to increase the quality of the predictions' distribution of the OP parameters, while in the Combined learning approach, we update the weights aiming to directly minimize the expected OP's cost function in a stochastic end-to-end fashion. We do an extensive evaluation using synthetic data with various noise properties and a real dataset, showing that decisions regret are generally lower (better) with both proposed methods.
6/6/2024
Bayesian Survival Analysis by Approximate Inference of Neural Networks
Christian Marius Lillelund, Martin Magris, Christian Fischer Pedersen
0
0
Variational Inference (VI) is a commonly used technique for approximate Bayesian inference and uncertainty estimation in deep learning models, yet it comes at a computational cost, as it doubles the number of trainable parameters to represent uncertainty. This rapidly becomes challenging in high-dimensional settings and motivates the use of alternative techniques for inference, such as Monte Carlo Dropout (MCD) or Spectral-normalized Neural Gaussian Process (SNGP). However, such methods have seen little adoption in survival analysis, and VI remains the prevalent approach for training probabilistic neural networks. In this paper, we investigate how to train deep probabilistic survival models in large datasets without introducing additional overhead in model complexity. To achieve this, we adopt three probabilistic approaches, namely VI, MCD, and SNGP, and evaluate them in terms of their prediction performance, calibration performance, and model complexity. In the context of probabilistic survival analysis, we investigate whether non-VI techniques can offer comparable or possibly improved prediction performance and uncertainty calibration compared to VI. In the MIMIC-IV dataset, we find that MCD aligns with VI in terms of the concordance index (0.748 vs. 0.743) and mean absolute error (254.9 vs. 254.7) using hinge loss, while providing C-calibrated uncertainty estimates. Moreover, our SNGP implementation provides D-calibrated survival functions in all datasets compared to VI (4/4 vs. 2/4, respectively). Our work encourages the use of techniques alternative to VI for survival analysis in high-dimensional datasets, where computational efficiency and overhead are of concern.
6/21/2024