A Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch

0

Sign in to get full access
Overview
- Presents a Bayesian framework for active object recognition, pose estimation, and shape transfer learning through touch
- Leverages tactile sensing and active learning to address these key robotics challenges
- Enables robots to efficiently explore and interact with objects to build models for recognition, pose estimation, and shape reconstruction
Plain English Explanation
This research proposes a Bayesian approach to help robots better understand the world around them through touch. Robots equipped with tactile sensors can use this framework to actively explore objects, recognize what they are, estimate their pose or orientation, and even learn the shape of new objects.
The key idea is to use a Bayesian probabilistic model that allows the robot to reason about the state of an object (like its identity, pose, and shape) based on the tactile feedback it receives. By strategically planning how to move and interact with the object, the robot can efficiently gather the most informative tactile data to refine its understanding.
For example, a robot trying to recognize a mug might start by gently touching the rim, then the handle, then the body - updating its probabilistic beliefs after each interaction. It can use this active learning approach to quickly converge on the mug's identity, estimate its 3D pose, and even learn the detailed shape of the mug's surface. This type of tactile-based perception and reasoning could be very useful for robots operating in complex, unstructured environments.
Technical Explanation
The paper presents a Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch. The core components include:
- Probabilistic Model: A Bayesian generative model that represents the robot's belief about the object's identity, pose, and shape based on tactile observations.
- Active Exploration: A planning module that selects the most informative touch interactions to refine the belief state and accomplish specific tasks (recognition, pose estimation, shape learning).
- Shape Transfer Learning: The ability to transfer partial shape knowledge about known objects to bootstrap the learning of new object shapes.
The framework is evaluated through simulated experiments on various object recognition, pose estimation, and shape reconstruction tasks. The results demonstrate the benefits of the active, Bayesian approach compared to passive, non-adaptive strategies.
Critical Analysis
The paper presents a well-designed Bayesian framework that effectively leverages tactile sensing and active learning for key robotics perception tasks. However, a few potential limitations are worth noting:
- The evaluation is limited to simulation, so the performance on real-world robotic systems remains to be seen. Practical challenges like sensor noise, calibration, and dexterity may impact the approach.
- The shape transfer learning assumes a database of known object shapes, which may not always be available. Techniques for learning shapes from scratch could further improve flexibility.
- The framework focuses on single object interactions, while real-world scenes often involve multiple interacting objects. Extending the approach to handle clutter and occlusions would be an important next step.
Overall, this research demonstrates the potential of tactile-based Bayesian reasoning to endow robots with robust, adaptive perception capabilities. Continued development and real-world validation could lead to significant advances in robot manipulation and interaction skills.
Conclusion
This paper introduces a Bayesian framework that enables robots to actively explore and learn about objects through touch. By reasoning probabilistically about object identity, pose, and shape based on tactile feedback, the framework allows robots to efficiently gather the most informative data to accomplish key perception tasks.
The active, adaptive nature of the approach sets it apart from more passive, non-adaptive tactile perception strategies. While the current evaluation is limited to simulation, the underlying principles show promise for enhancing robot interaction and manipulation capabilities in complex, unstructured environments. Further research is needed to address practical challenges and expand the framework to handle more realistic, cluttered scenes.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch
Haodong Zheng, Andrei Jalba, Raymond H. Cuijpers, Wijnand IJsselsteijn, Sanne Schoenmakers
As humans can explore and understand the world through the sense of touch, tactile sensing is also an important aspect of robotic perception. In unstructured environments, robots can encounter both known and novel objects, this calls for a method to address both known and novel objects. In this study, we combine a particle filter (PF) and Gaussian process implicit surface (GPIS) in a unified Bayesian framework. The framework can differentiate between known and novel objects, perform object recognition, estimate pose for known objects, and reconstruct shapes for unknown objects, in an active learning fashion. By grounding the selection of the GPIS prior with the maximum-likelihood-estimation (MLE) shape from the PF, the knowledge about known objects' shapes can be transferred to learn novel shapes. An exploration procedure with global shape estimation is proposed to guide active data acquisition and conclude the exploration when sufficient information is obtained. The performance of the proposed Bayesian framework is evaluated through simulations on known and novel objects, initialized with random poses. The results show that the proposed exploration procedure, utilizing global shape estimation, achieves faster exploration than a local exploration procedure based on rapidly explore random tree (RRT). Overall, our results indicate that the proposed framework is effective and efficient in object recognition, pose estimation and shape reconstruction. Moreover, we show that a learned shape can be included as a new prior and used effectively for future object recognition and pose estimation.
Read more9/16/2024
📉
0
Visuo-Tactile based Predictive Cross Modal Perception for Object Exploration in Robotics
Anirvan Dutta, Etienne Burdet, Mohsen Kaboli
Autonomously exploring the unknown physical properties of novel objects such as stiffness, mass, center of mass, friction coefficient, and shape is crucial for autonomous robotic systems operating continuously in unstructured environments. We introduce a novel visuo-tactile based predictive cross-modal perception framework where initial visual observations (shape) aid in obtaining an initial prior over the object properties (mass). The initial prior improves the efficiency of the object property estimation, which is autonomously inferred via interactive non-prehensile pushing and using a dual filtering approach. The inferred properties are then used to enhance the predictive capability of the cross-modal function efficiently by using a human-inspired `surprise' formulation. We evaluated our proposed framework in the real-robotic scenario, demonstrating superior performance.
Read more5/24/2024
🏷️
0
Pose-free object classification from surface contact features in sequences of Robotic grasps
Teresa Alves, Alexandre Bernardino, Plinio Moreno
In this work, we propose two cost efficient methods for object identification, using a multi-fingered robotic hand equipped with proprioceptive sensing. Both methods are trained on known objects and rely on a limited set of features, obtained during a few grasps on an object. Contrary to most methods in the literature, our methods do not rely on the knowledge of the relative pose between object and hand, which greatly expands the domain of application. However, if that knowledge is available, we propose an additional active exploration step that reduces the overall number of grasps required for a good recognition of the object. One of the methods depends on the contact positions and normals and the other depends on the contact positions alone. We test the proposed methods in the GraspIt! simulator and show that haptic-based object classification is possible in pose-free conditions. We evaluate the parameters that produce the most accurate results and require the least number of grasps for classification.
Read more4/1/2024
0
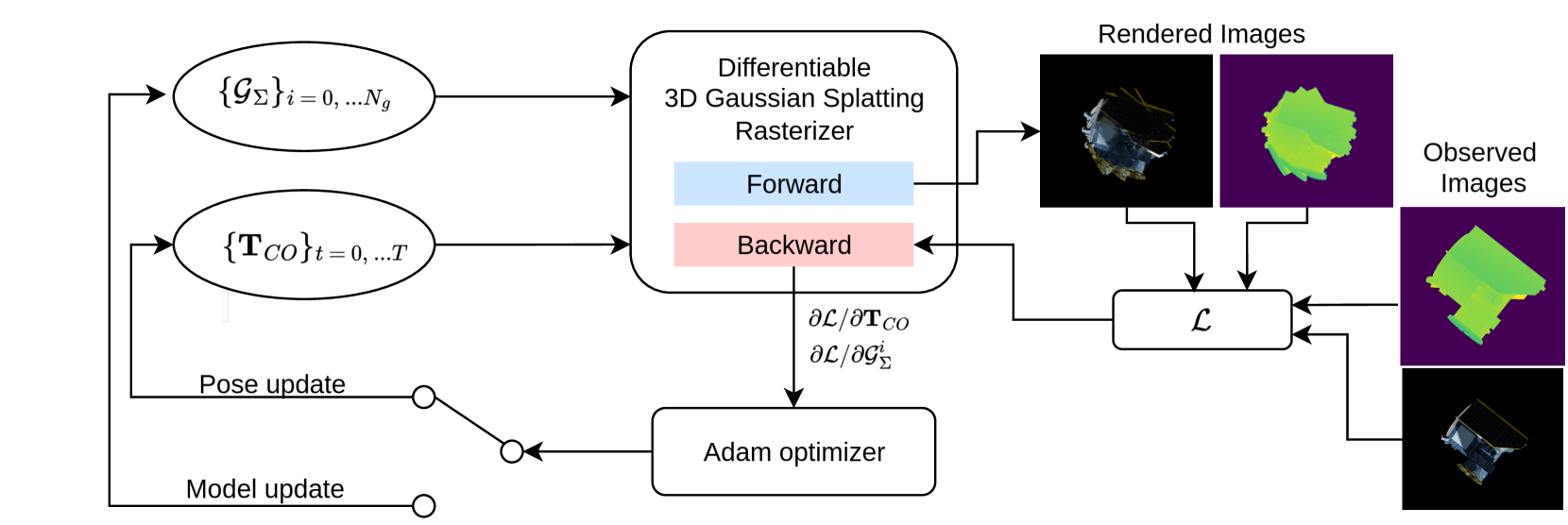
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
Kuldeep R Barad, Antoine Richard, Jan Dentler, Miguel Olivares-Mendez, Carol Martinez
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
Read more9/20/2024