Benchmarking ML Approaches to UWB-Based Range-Only Posture Recognition for Human Robot-Interaction

0
👁️
Sign in to get full access
Overview
- This paper presents a novel approach to human pose estimation using machine learning and ultra-wideband (UWB) sensors.
- The goal is to detect and track the positions of various body parts to enable real-time control of mobile/aerial robots.
- The study uses five UWB sensors on the human body to classify still poses and recognize posture.
- Machine learning algorithms like K-Nearest Neighbors, Support Vector Machine, and Multi-Layer Perceptron are employed and compared for posture prediction accuracy.
- The proposed approach is demonstrated for real-time control of robots, with inference implemented in a ROS 2 node.
Plain English Explanation
The paper describes a new way to estimate human body pose using advanced technology. Pose estimation is the process of detecting and tracking the positions of different parts of the human body, like the arms, legs, and torso. This information can then be used to control robots or other devices.
Instead of using traditional motion sensors, the researchers in this study used ultra-wideband (UWB) sensors placed on the body. UWB sensors can accurately measure the distance between them, which the researchers used as input features for machine learning models to predict the person's posture.
The team tested several different machine learning algorithms, including K-Nearest Neighbors, Support Vector Machines, and a deep neural network. They found that these models could accurately predict the person's posture based on the UWB sensor data.
The researchers then demonstrated how this pose estimation system could be used to control different types of mobile and aerial robots in real-time. By translating the predicted human posture into robot motion commands, the robots were able to mimic the person's movements.
Overall, this novel approach using UWB sensors and machine learning shows promise for enabling more natural and intuitive control of robotic systems by directly using human body movements as input.
Technical Explanation
The paper presents a human pose estimation system that utilizes ultra-wideband (UWB) sensors implemented on the human body. The researchers placed five UWB nodes on the participant's body to enable the classification of static poses and more robust posture recognition.
The UWB range measurements between the sensors serve as input features for several machine learning models, including K-Nearest Neighbors (KNN), Support Vector Machines (SVM), and a deep Multi-Layer Perceptron (MLP) neural network. These models are trained and compared to determine the most accurate posture prediction.
The proposed approach is then demonstrated for real-time control of different mobile and aerial robots using the predicted human postures. The system is implemented as a ROS 2 node, allowing for seamless integration with robotics platforms.
Experimental results show the effectiveness of the UWB-based pose estimation system, with high accuracy in predicting human posture and translating them into corresponding robot movements.
Critical Analysis
The paper presents a promising approach to human pose estimation using UWB sensors and machine learning, but there are a few potential limitations and areas for further research:
- The study was conducted with a limited number of participants, so the generalizability of the results across a more diverse population is unclear.
- The experiments focused on static poses, but real-world applications would likely require the ability to recognize and track dynamic, continuous movements.
- The paper does not provide detailed information on the robustness of the system to factors like clothing, occlusions, or environmental conditions that could affect the UWB sensor readings.
- While the researchers demonstrated the system's capabilities for controlling mobile and aerial robots, the paper does not explore other potential applications, such as human-computer interaction or virtual/augmented reality experiences.
Further research could investigate ways to improve the system's accuracy and reliability, as well as explore its integration with other sensing modalities (e.g., inertial measurement units, computer vision) to enhance the overall pose estimation capabilities.
Conclusion
This paper presents a novel approach to human pose estimation that leverages ultra-wideband (UWB) sensors and machine learning algorithms. The proposed system demonstrates the ability to accurately predict human posture and translate it into real-time control of mobile and aerial robots.
The use of UWB technology as an alternative to traditional motion sensors shows promise for enabling more natural and intuitive control of robotic systems by directly using human body movements as input. While the study has some limitations, the overall approach represents an interesting step forward in the field of human-robot interaction and the development of more seamless human-machine interfaces.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👁️
0
Benchmarking ML Approaches to UWB-Based Range-Only Posture Recognition for Human Robot-Interaction
Salma Salimi, Sahar Salimpour, Jorge Pe~na Queralta, Wallace Moreira Bessa, Tomi Westerlund
Human pose estimation involves detecting and tracking the positions of various body parts using input data from sources such as images, videos, or motion and inertial sensors. This paper presents a novel approach to human pose estimation using machine learning algorithms to predict human posture and translate them into robot motion commands using ultra-wideband (UWB) nodes, as an alternative to motion sensors. The study utilizes five UWB sensors implemented on the human body to enable the classification of still poses and more robust posture recognition. This approach ensures effective posture recognition across a variety of subjects. These range measurements serve as input features for posture prediction models, which are implemented and compared for accuracy. For this purpose, machine learning algorithms including K-Nearest Neighbors (KNN), Support Vector Machine (SVM), and deep Multi-Layer Perceptron (MLP) neural network are employed and compared in predicting corresponding postures. We demonstrate the proposed approach for real-time control of different mobile/aerial robots with inference implemented in a ROS 2 node. Experimental results demonstrate the efficacy of the approach, showcasing successful prediction of human posture and corresponding robot movements with high accuracy.
Read more8/29/2024

0
MURP: Multi-Agent Ultra-Wideband Relative Pose Estimation with Constrained Communications in 3D Environments
Andrew Fishberg, Brian Quiter, Jonathan P. How
Inter-agent relative localization is critical for many multi-robot systems operating in the absence of external positioning infrastructure or prior environmental knowledge. We propose a novel inter-agent relative 3D pose estimation system where each participating agent is equipped with several ultra-wideband (UWB) ranging tags. Prior work typically supplements noisy UWB range measurements with additional continuously transmitted data (e.g., odometry) leading to potential scaling issues with increased team size and/or decreased communication network capability. By equipping each agent with multiple UWB antennas, our approach addresses these concerns by using only locally collected UWB range measurements, a priori state constraints, and event-based detections of when said constraints are violated. The addition of our learned mean ranging bias correction improves our approach by an additional 19% positional error, and gives us an overall experimental mean absolute position and heading errors of 0.24m and 9.5 degrees respectively. When compared to other state-of-the-art approaches, our work demonstrates improved performance over similar systems, while remaining competitive with methods that have significantly higher communication costs. Additionally, we make our datasets available.
Read more8/13/2024

0
Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Derek Knowles, Adam Dai, Grace Gao
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common anchor and tag UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
Read more6/26/2024
0
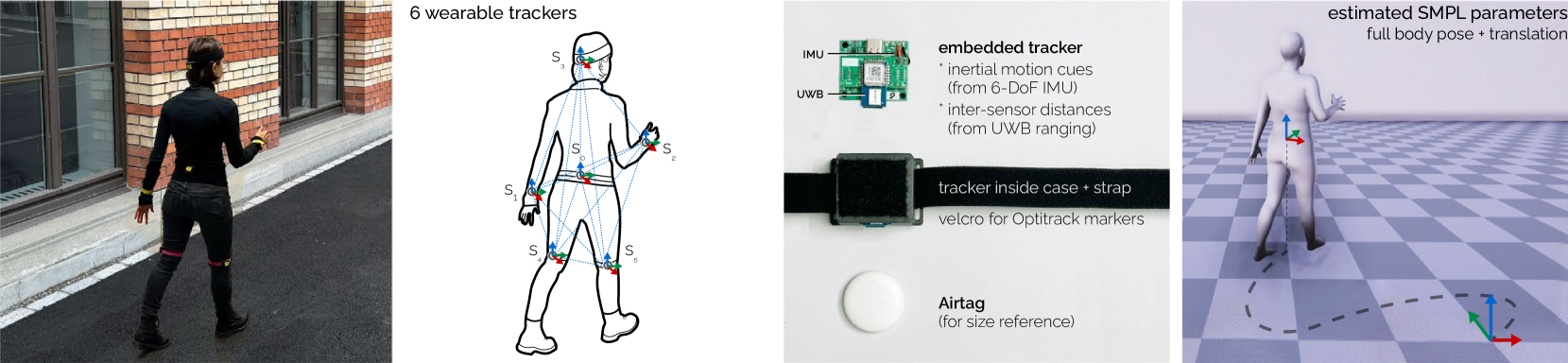
Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging
Rayan Armani, Changlin Qian, Jiaxi Jiang, Christian Holz
While camera-based capture systems remain the gold standard for recording human motion, learning-based tracking systems based on sparse wearable sensors are gaining popularity. Most commonly, they use inertial sensors, whose propensity for drift and jitter have so far limited tracking accuracy. In this paper, we propose Ultra Inertial Poser, a novel 3D full body pose estimation method that constrains drift and jitter in inertial tracking via inter-sensor distances. We estimate these distances across sparse sensor setups using a lightweight embedded tracker that augments inexpensive off-the-shelf 6D inertial measurement units with ultra-wideband radio-based ranging$-$dynamically and without the need for stationary reference anchors. Our method then fuses these inter-sensor distances with the 3D states estimated from each sensor Our graph-based machine learning model processes the 3D states and distances to estimate a person's 3D full body pose and translation. To train our model, we synthesize inertial measurements and distance estimates from the motion capture database AMASS. For evaluation, we contribute a novel motion dataset of 10 participants who performed 25 motion types, captured by 6 wearable IMU+UWB trackers and an optical motion capture system, totaling 200 minutes of synchronized sensor data (UIP-DB). Our extensive experiments show state-of-the-art performance for our method over PIP and TIP, reducing position error from $13.62$ to $10.65cm$ ($22%$ better) and lowering jitter from $1.56$ to $0.055km/s^3$ (a reduction of $97%$).
Read more5/1/2024