BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains

0
Sign in to get full access
Overview
- This paper introduces BiRoDiff, a novel approach for enabling bipedal robots to navigate unseen terrains using diffusion policies.
- The key idea is to leverage diffusion models, which are a type of generative AI model, to learn robust and adaptable locomotion policies that can handle a wide variety of challenging environments.
- The authors demonstrate the effectiveness of BiRoDiff through extensive simulations and real-world experiments, showcasing its ability to outperform existing methods for legged robot navigation.
Plain English Explanation
Imagine you're trying to teach a robot how to walk across different types of terrain, like grass, rocks, or sand. This can be really challenging because every environment is unique, and the robot needs to be able to adapt its movements accordingly.
The researchers behind this paper developed a new technique called BiRoDiff that uses a special kind of AI model called a diffusion model to help the robot learn how to navigate these unseen terrains. Diffusion models work by gradually "diffusing" or transforming simple data, like random noise, into more complex and realistic-looking data, like images or videos.
In the case of BiRoDiff, the researchers used diffusion models to teach the robot how to adjust its walking movements to different surfaces and obstacles. By training the diffusion model on a wide variety of simulated environments, they were able to create a set of policies or "rules" that the robot can use to figure out how to walk in new, unfamiliar situations.
The key advantage of this approach is that it allows the robot to be more adaptable and robust, rather than being limited to a fixed set of pre-programmed behaviors. The robot can use the diffusion-based policies to dynamically adjust its movements in real-time, enabling it to navigate a much wider range of terrains compared to traditional methods.
Through their experiments, the researchers showed that BiRoDiff outperforms other state-of-the-art techniques for legged robot locomotion, both in simulation and in the real world. This suggests that diffusion-based approaches could be a promising direction for developing more versatile and capable robotic systems.
Technical Explanation
The key innovation in this paper is the use of diffusion models to learn bipedal robot locomotion policies that can generalize to a wide range of unseen terrains. Diffusion models are a type of generative AI model that work by gradually transforming simple data, like random noise, into more complex and realistic-looking data, like images or videos.
The authors propose a framework called BiRoDiff that leverages diffusion models to learn robust and adaptable locomotion policies for bipedal robots. The core idea is to train a diffusion model on a diverse set of simulated environments, where the input to the model is the current state of the robot (e.g., joint angles, velocities) and the output is the desired next action (e.g., joint torques) that will move the robot forward.
By learning this diffusion-based policy, the robot can dynamically adjust its movements in real-time to navigate a wide variety of terrains, rather than being limited to a fixed set of pre-programmed behaviors. The authors demonstrate the effectiveness of BiRoDiff through extensive simulations and real-world experiments, showing that it outperforms other state-of-the-art methods for legged robot locomotion, such as TEDI and PDP.
One key aspect of the BiRoDiff framework is its ability to generalize to unseen terrains. By training the diffusion model on a diverse set of simulated environments, the authors show that the resulting policies can be successfully applied to new, previously unseen terrains without any additional fine-tuning or adaptation.
This is a significant advantage over traditional methods, which often struggle to generalize beyond the specific scenarios they were trained on. The authors attribute this improved generalization to the inherent flexibility and adaptability of the diffusion-based policies learned by BiRoDiff.
Critical Analysis
The BiRoDiff paper presents a promising approach for enabling bipedal robots to navigate a wide range of unseen terrains using diffusion-based policies. The authors have conducted a thorough evaluation of their method, both in simulation and on real-world hardware, and the results are quite compelling.
One potential limitation of the work is the reliance on simulation for the majority of the training and evaluation. While the authors do demonstrate successful real-world deployment, it would be interesting to see how well the diffusion-based policies generalize to an even broader range of real-world environments and scenarios.
Additionally, the paper does not provide much insight into the inner workings of the diffusion model or the specific training procedures used. A more detailed technical analysis of these aspects could help shed light on the key factors that contribute to the improved generalization capabilities of BiRoDiff.
Another area for further research could be investigating the scalability of the approach to more complex robot morphologies or larger-scale environments. The current work focuses on a relatively simple bipedal robot, and it would be valuable to explore how well the diffusion-based policies can be extended to more sophisticated legged systems or even multi-robot scenarios.
Overall, the BiRoDiff paper represents an exciting step forward in the field of legged robot locomotion, demonstrating the potential of diffusion models to enable more adaptable and robust robotic behaviors. As the authors continue to refine and expand upon their work, it will be interesting to see how this approach can be further developed and applied to real-world robotic applications.
Conclusion
The BiRoDiff paper introduces a novel approach for enabling bipedal robots to navigate a wide range of unseen terrains using diffusion-based policies. By leveraging the flexibility and adaptability of diffusion models, the researchers were able to develop a framework that can dynamically adjust the robot's movements in real-time to handle a variety of challenging environments.
The key innovation of this work is the use of diffusion models to learn robust and generalizable locomotion policies, which outperform existing state-of-the-art methods both in simulation and in real-world experiments. This suggests that diffusion-based approaches could be a promising direction for developing more versatile and capable robotic systems, with potential applications in areas such as search and rescue, disaster response, and exploration.
As the field of legged robotics continues to evolve, the insights and techniques presented in the BiRoDiff paper can serve as a valuable contribution, inspiring further research and development in the pursuit of more adaptable and intelligent robotic locomotion.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains
GVS Mothish, Manan Tayal, Shishir Kolathaya
Locomotion on unknown terrains is essential for bipedal robots to handle novel real-world challenges, thus expanding their utility in disaster response and exploration. In this work, we introduce a lightweight framework that learns a single walking controller that yields locomotion on multiple terrains. We have designed a real-time robot controller based on diffusion models, which not only captures multiple behaviours with different velocities in a single policy but also generalizes well for unseen terrains. Our controller learns with offline data, which is better than online learning in aspects like scalability, simplicity in training scheme etc. We have designed and implemented a diffusion model-based policy controller in simulation on our custom-made Bipedal Robot model named Stoch BiRo. We have demonstrated its generalization capability and high frequency control step generation relative to typical generative models, which require huge onboarding compute.
Read more7/9/2024

0
Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
Read more7/30/2024
👁️
0
DiffuseLoco: Real-Time Legged Locomotion Control with Diffusion from Offline Datasets
Xiaoyu Huang, Yufeng Chi, Ruofeng Wang, Zhongyu Li, Xue Bin Peng, Sophia Shao, Borivoje Nikolic, Koushil Sreenath
This work introduces DiffuseLoco, a framework for training multi-skill diffusion-based policies for dynamic legged locomotion from offline datasets, enabling real-time control of diverse skills on robots in the real world. Offline learning at scale has led to breakthroughs in computer vision, natural language processing, and robotic manipulation domains. However, scaling up learning for legged robot locomotion, especially with multiple skills in a single policy, presents significant challenges for prior online reinforcement learning methods. To address this challenge, we propose a novel, scalable framework that leverages diffusion models to directly learn from offline multimodal datasets with a diverse set of locomotion skills. With design choices tailored for real-time control in dynamical systems, including receding horizon control and delayed inputs, DiffuseLoco is capable of reproducing multimodality in performing various locomotion skills, zero-shot transfer to real quadrupedal robots, and it can be deployed on edge computing devices. Furthermore, DiffuseLoco demonstrates free transitions between skills and robustness against environmental variations. Through extensive benchmarking in real-world experiments, DiffuseLoco exhibits better stability and velocity tracking performance compared to prior reinforcement learning and non-diffusion-based behavior cloning baselines. The design choices are validated via comprehensive ablation studies. This work opens new possibilities for scaling up learning-based legged locomotion controllers through the scaling of large, expressive models and diverse offline datasets.
Read more5/1/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
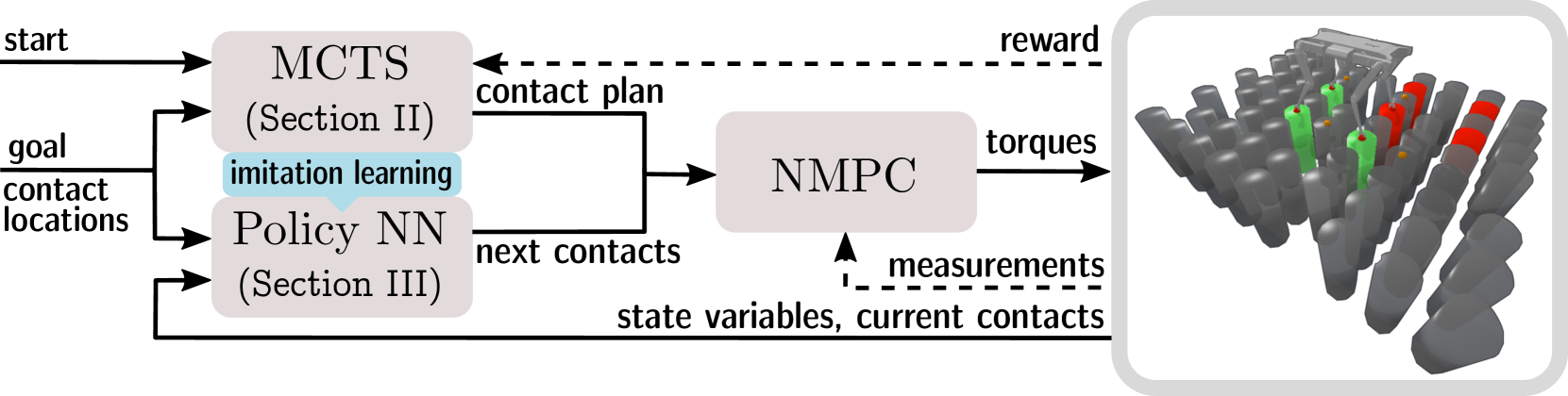
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024