Diffusion-based learning of contact plans for agile locomotion

0
Sign in to get full access
Overview
- This paper presents a method for efficient search and learning of agile locomotion strategies for legged robots navigating on stepping stones.
- The key components are a Monte Carlo Tree Search (MCTS) based contact planner and a learning-based module to improve the contact planner's performance.
- The approach aims to enable legged robots to navigate challenging environments with discrete footholds in an efficient and effective manner.
Plain English Explanation
The paper discusses a new technique for helping legged robots, like four-legged or humanoid robots, move quickly and nimbly across environments with discrete stepping stones or other discontinuous surfaces. This is an important capability, as many real-world environments contain gaps, rocks, or other discontinuities that are challenging for robots to navigate.
The core idea is to use a planning algorithm called Monte Carlo Tree Search (MCTS) to efficiently search through different possible sequences of foot placements the robot could make to find an optimal path across the stepping stones. MCTS is good at quickly exploring many possible options and identifying the most promising ones, which is crucial when the robot needs to react and replan in real-time as it's moving.
To further improve the MCTS planner's performance, the researchers also incorporate a learning-based module. This allows the planner to get better over time at anticipating good foot placements and sequencing, through experience and training, rather than having to search blindly each time.
By combining the fast, exploratory MCTS approach with learning-based refinements, the researchers developed a system that can enable legged robots to traverse challenging, discontinuous environments in an agile and efficient manner. This could have important applications in domains like search and rescue, disaster response, or exploration of complex outdoor terrains.
Technical Explanation
The paper presents a novel framework for efficient search and learning of agile locomotion strategies for legged robots navigating on stepping stones. The key components are:
-
MCTS-based Contact Planner: The researchers use Monte Carlo Tree Search (MCTS), a powerful planning algorithm, to efficiently search through possible sequences of foot placements the robot could make to traverse the stepping stones. MCTS is well-suited for this problem as it can quickly explore many possibilities and identify the most promising options, which is crucial for real-time replanning.
-
Learning-based Improvements: To further enhance the performance of the MCTS planner, the researchers incorporate a learning-based module. This allows the planner to learn from experience and refine its ability to anticipate good foot placements and sequencing, rather than having to search blindly each time.
The paper demonstrates the effectiveness of this approach through simulated experiments on various stepping stone environments. The results show that the combined MCTS-learning framework outperforms alternative methods in terms of success rate, efficiency, and robustness.
This research builds upon previous work on learning feasible transitions for efficient contact planning, learning generic dynamic locomotion for humanoids, and other techniques for multi-contact stochastic predictive control, online multi-contact planning, and diffusion-based bipedal locomotion.
Critical Analysis
The paper presents a promising approach for enabling legged robots to navigate challenging, discontinuous environments. The combination of MCTS-based planning and learning-based refinements is a novel and well-designed solution to this problem.
One potential limitation is that the evaluation is primarily conducted in simulation, and the performance on real-world hardware may differ. The researchers acknowledge this and suggest further validation on physical robotic platforms as an area for future work.
Additionally, the paper does not delve into the specifics of how the learning-based module is implemented and trained. More details on the architecture, training process, and generalization capabilities of this component would be useful for assessing its strengths and weaknesses.
Overall, this research makes a valuable contribution to the field of legged robotics and agile locomotion. The efficient search and learning techniques developed in this work could have broader applications beyond the specific stepping stones scenario, such as in other challenging terrain navigation tasks.
Conclusion
This paper presents an innovative framework for enabling legged robots to navigate environments with discrete stepping stones in an efficient and agile manner. By combining a powerful MCTS-based contact planner with a learning-based module, the researchers have developed a system that can quickly and effectively find optimal paths across discontinuous terrains.
The demonstrated success of this approach in simulation suggests that it could have significant real-world applications, such as in search and rescue operations, disaster response, or exploration of complex outdoor environments. Further validation on physical robotic platforms and continued refinement of the learning-based components could further enhance the practicality and versatility of this technology.
Overall, this research represents an important advancement in the field of legged robotics and has the potential to substantially improve the mobility and autonomy of these systems in challenging real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
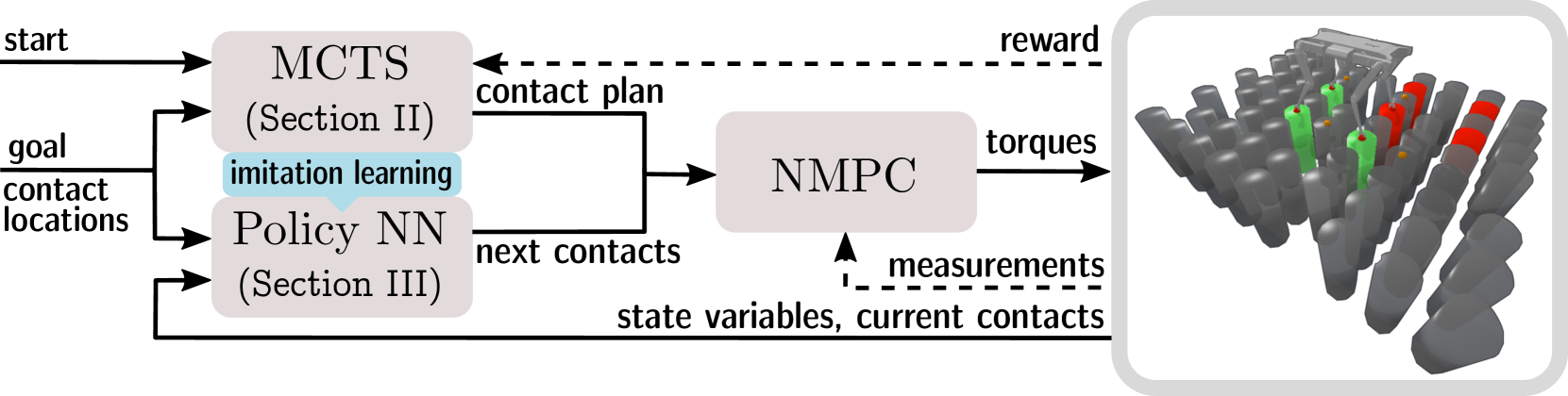
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024

0
Learning feasible transitions for efficient contact planning
Rikhat Akizhanov, Victor Dh'edin, Majid Khadiv, Ivan Laptev
Contact planning for legged robots in extremely constrained environments is challenging. The main difficulty stems from the mixed nature of the problem, discrete search together with continuous trajectory optimization. To speed up the discrete search problem, we propose in this paper to learn the properties of transitions from one contact mode to the next. In particular, we learn a feasibility classifier and an offset network; the former predicts if a potential next contact state is feasible from the current contact state, while the latter learns to compensate for misalignment in achieving a desired contact state due to imperfections of the low-level control. We integrate these learned networks in a Monte Carlo Tree Search (MCTS) contact planner to better prune the tree and improve the heuristic. Our simulation results demonstrate that training these networks with offline data significantly speeds up the online search process and improves its accuracy.
Read more7/17/2024

0
Contact-conditioned learning of locomotion policies
Michal Ciebielski, Majid Khadiv
Locomotion is realized through making and breaking contact. State-of-the-art constrained nonlinear model predictive controllers (NMPC) generate whole-body trajectories for a given contact sequence. However, these approaches are computationally expensive at run-time. Hence it is desirable to offload some of this computation to an offline phase. In this paper, we hypothesize that conditioning a learned policy on the locations and timings of contact is a suitable representation for learning a single policy that can generate multiple gaits (contact sequences). In this way, we can build a single generalist policy to realize different gaited and non-gaited locomotion skills and the transitions among them. Our extensive simulation results demonstrate the validity of our hypothesis for learning multiple gaits for a biped robot.
Read more8/6/2024

0
Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
Read more7/30/2024