A Black-Box Physics-Informed Estimator based on Gaussian Process Regression for Robot Inverse Dynamics Identification

0

Sign in to get full access
Overview
- This paper presents a black-box physics-informed estimator based on Gaussian process regression for identifying the inverse dynamics of a robot.
- The approach aims to learn the complex robot dynamics without requiring detailed knowledge of the robot's physical parameters or structure.
- The estimator can accurately predict joint torques from observed motion and is robust to modeling errors and noise.
Plain English Explanation
The inverse dynamics of a robot refers to the process of calculating the torque (rotational force) needed at each joint to produce a desired motion. Traditionally, this has required a detailed mathematical model of the robot's physical structure and properties.
However, this paper proposes a new approach that uses Gaussian process regression, a powerful machine learning technique, to learn the inverse dynamics in a "black-box" manner. This means the system doesn't need to know the specifics of how the robot is built - it can simply observe the robot's motions and learn to predict the necessary joint torques.
The key advantage of this approach is that it can accurately model the complex nonlinear robot dynamics without requiring a detailed physical model. This makes it more robust to modeling errors and noise that often plague traditional analytic approaches. The Gaussian process model also provides uncertainty estimates, which can be useful for control applications.
Technical Explanation
The paper introduces a black-box physics-informed estimator that uses Gaussian process regression to learn the inverse dynamics of a robot. The inverse dynamics problem involves determining the joint torques required to produce a desired motion.
The proposed estimator takes as input the robot's joint positions, velocities, and accelerations and outputs the corresponding joint torques. It does not require a detailed analytical model of the robot's physical structure or parameters. Instead, the Gaussian process model learns a nonparametric mapping between the motion data and torques.
A key innovation is the use of physics-informed kernels in the Gaussian process, which encode prior knowledge about the structure of the inverse dynamics function. This helps the model generalize better from limited training data.
The paper evaluates the estimator on simulated and real robot experiments, demonstrating its ability to accurately predict joint torques and outperform traditional analytic models, especially in the presence of modeling errors and noise.
Critical Analysis
The paper provides a thorough evaluation of the proposed approach, including comparisons to analytical methods and an analysis of its robustness. However, some potential limitations are worth noting:
- The approach relies on having access to accurate measurements of the robot's motion (positions, velocities, accelerations). In practice, these may be difficult to obtain with high precision, which could degrade performance.
- The paper focuses on identifying the inverse dynamics, but does not address how this model could be effectively used for control or other applications. Further research may be needed to fully leverage the capabilities of this estimator.
- The experiments were conducted on relatively simple robotic systems. Scaling the approach to more complex, high-degree-of-freedom robots may present additional challenges that were not explored in this work.
Overall, the paper presents a promising black-box physics-informed estimator that could significantly simplify the process of modeling robot dynamics. However, further research is needed to fully understand the practical limitations and potential use cases of this technology.
Conclusion
This paper introduces a novel Gaussian process regression-based approach for identifying the inverse dynamics of robots in a black-box manner. By leveraging physics-informed kernels, the estimator can accurately predict joint torques from observed motion data without requiring detailed knowledge of the robot's physical structure.
The key advantage of this approach is its ability to model complex nonlinear dynamics while being robust to modeling errors and noise. This could lead to significant simplifications in the process of developing control systems for robots, with potential applications in areas like human-robot interaction and learning-based control.
While the paper provides a strong foundation, further research is needed to fully understand the practical limitations and expand the capabilities of this black-box physics-informed estimator for more complex robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Black-Box Physics-Informed Estimator based on Gaussian Process Regression for Robot Inverse Dynamics Identification
Giulio Giacomuzzos, Ruggero Carli, Diego Romeres, Alberto Dalla Libera
Learning the inverse dynamics of robots directly from data, adopting a black-box approach, is interesting for several real-world scenarios where limited knowledge about the system is available. In this paper, we propose a black-box model based on Gaussian Process (GP) Regression for the identification of the inverse dynamics of robotic manipulators. The proposed model relies on a novel multidimensional kernel, called textit{Lagrangian Inspired Polynomial} (kernelInitials{}) kernel. The kernelInitials{} kernel is based on two main ideas. First, instead of directly modeling the inverse dynamics components, we model as GPs the kinetic and potential energy of the system. The GP prior on the inverse dynamics components is derived from those on the energies by applying the properties of GPs under linear operators. Second, as regards the energy prior definition, we prove a polynomial structure of the kinetic and potential energy, and we derive a polynomial kernel that encodes this property. As a consequence, the proposed model allows also to estimate the kinetic and potential energy without requiring any label on these quantities. Results on simulation and on two real robotic manipulators, namely a 7 DOF Franka Emika Panda, and a 6 DOF MELFA RV4FL, show that the proposed model outperforms state-of-the-art black-box estimators based both on Gaussian Processes and Neural Networks in terms of accuracy, generality and data efficiency. The experiments on the MELFA robot also demonstrate that our approach achieves performance comparable to fine-tuned model-based estimators, despite requiring less prior information.
Read more9/9/2024
↗️
0
Formal Verification of Unknown Dynamical Systems via Gaussian Process Regression
John Skovbekk, Luca Laurenti, Eric Frew, Morteza Lahijanian
Leveraging autonomous systems in safety-critical scenarios requires verifying their behaviors in the presence of uncertainties and black-box components that influence the system dynamics. In this work, we develop a framework for verifying discrete-time dynamical systems with unmodelled dynamics and noisy measurements against temporal logic specifications from an input-output dataset. The verification framework employs Gaussian process (GP) regression to learn the unknown dynamics from the dataset and abstracts the continuous-space system as a finite-state, uncertain Markov decision process (MDP). This abstraction relies on space discretization and transition probability intervals that capture the uncertainty due to the error in GP regression by using reproducible kernel Hilbert space analysis as well as the uncertainty induced by discretization. The framework utilizes existing model checking tools for verification of the uncertain MDP abstraction against a given temporal logic specification. We establish the correctness of extending the verification results on the abstraction created from noisy measurements to the underlying system. We show that the computational complexity of the framework is polynomial in the size of the dataset and discrete abstraction. The complexity analysis illustrates a trade-off between the quality of the verification results and the computational burden to handle larger datasets and finer abstractions. Finally, we demonstrate the efficacy of our learning and verification framework on several case studies with linear, nonlinear, and switched dynamical systems.
Read more7/17/2024
0
Data-driven Force Observer for Human-Robot Interaction with Series Elastic Actuators using Gaussian Processes
Samuel Tesfazgi, Markus Ke{ss}ler, Emilio Trigili, Armin Lederer, Sandra Hirche
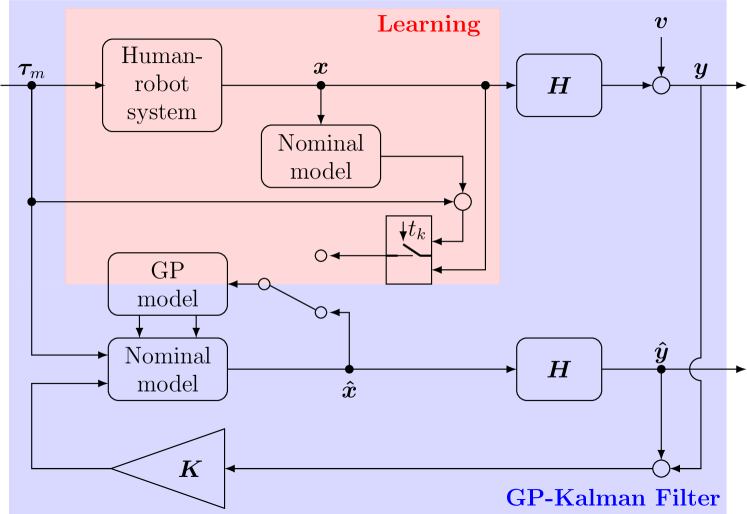
Ensuring safety and adapting to the user's behavior are of paramount importance in physical human-robot interaction. Thus, incorporating elastic actuators in the robot's mechanical design has become popular, since it offers intrinsic compliance and additionally provide a coarse estimate for the interaction force by measuring the deformation of the elastic components. While observer-based methods have been shown to improve these estimates, they rely on accurate models of the system, which are challenging to obtain in complex operating environments. In this work, we overcome this issue by learning the unknown dynamics components using Gaussian process (GP) regression. By employing the learned model in a Bayesian filtering framework, we improve the estimation accuracy and additionally obtain an observer that explicitly considers local model uncertainty in the confidence measure of the state estimate. Furthermore, we derive guaranteed estimation error bounds, thus, facilitating the use in safety-critical applications. We demonstrate the effectiveness of the proposed approach experimentally in a human-exoskeleton interaction scenario.
Read more5/15/2024
0
Gaussian process learning of nonlinear dynamics
Dongwei Ye, Mengwu Guo
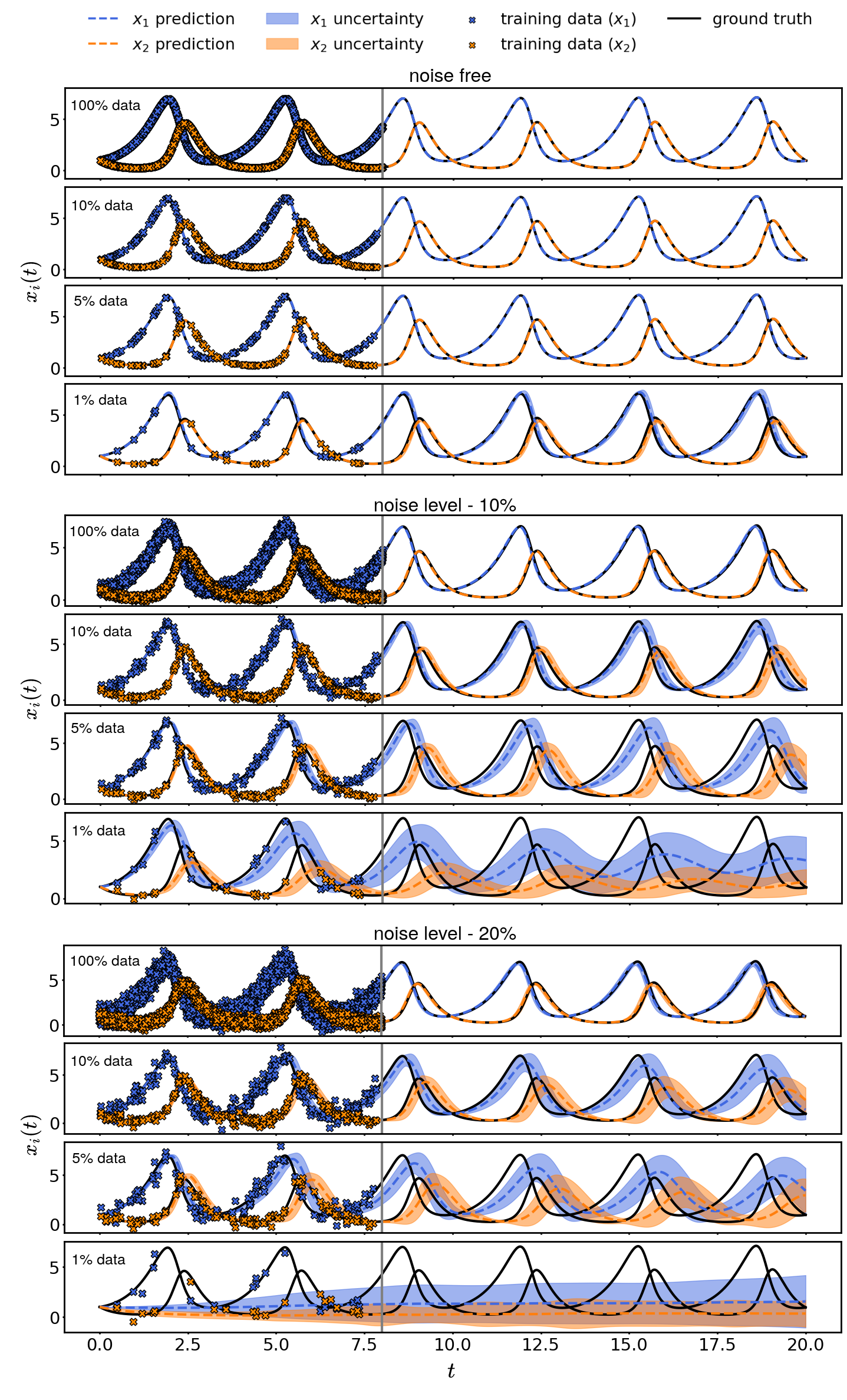
One of the pivotal tasks in scientific machine learning is to represent underlying dynamical systems from time series data. Many methods for such dynamics learning explicitly require the derivatives of state data, which are not directly available and can be approximated conventionally by finite differences. However, the discrete approximations of time derivatives may result in poor estimations when state data are scarce and/or corrupted by noise, thus compromising the predictiveness of the learned dynamical models. To overcome this technical hurdle, we propose a new method that learns nonlinear dynamics through a Bayesian inference of characterizing model parameters. This method leverages a Gaussian process representation of states, and constructs a likelihood function using the correlation between state data and their derivatives, yet prevents explicit evaluations of time derivatives. Through a Bayesian scheme, a probabilistic estimate of the model parameters is given by the posterior distribution, and thus a quantification is facilitated for uncertainties from noisy state data and the learning process. Specifically, we will discuss the applicability of the proposed method to several typical scenarios for dynamical systems: identification and estimation with an affine parametrization, nonlinear parametric approximation without prior knowledge, and general parameter estimation for a given dynamical system.
Read more4/17/2024