BoostRad: Enhancing Object Detection by Boosting Radar Reflections
2404.17861
0
0
Abstract
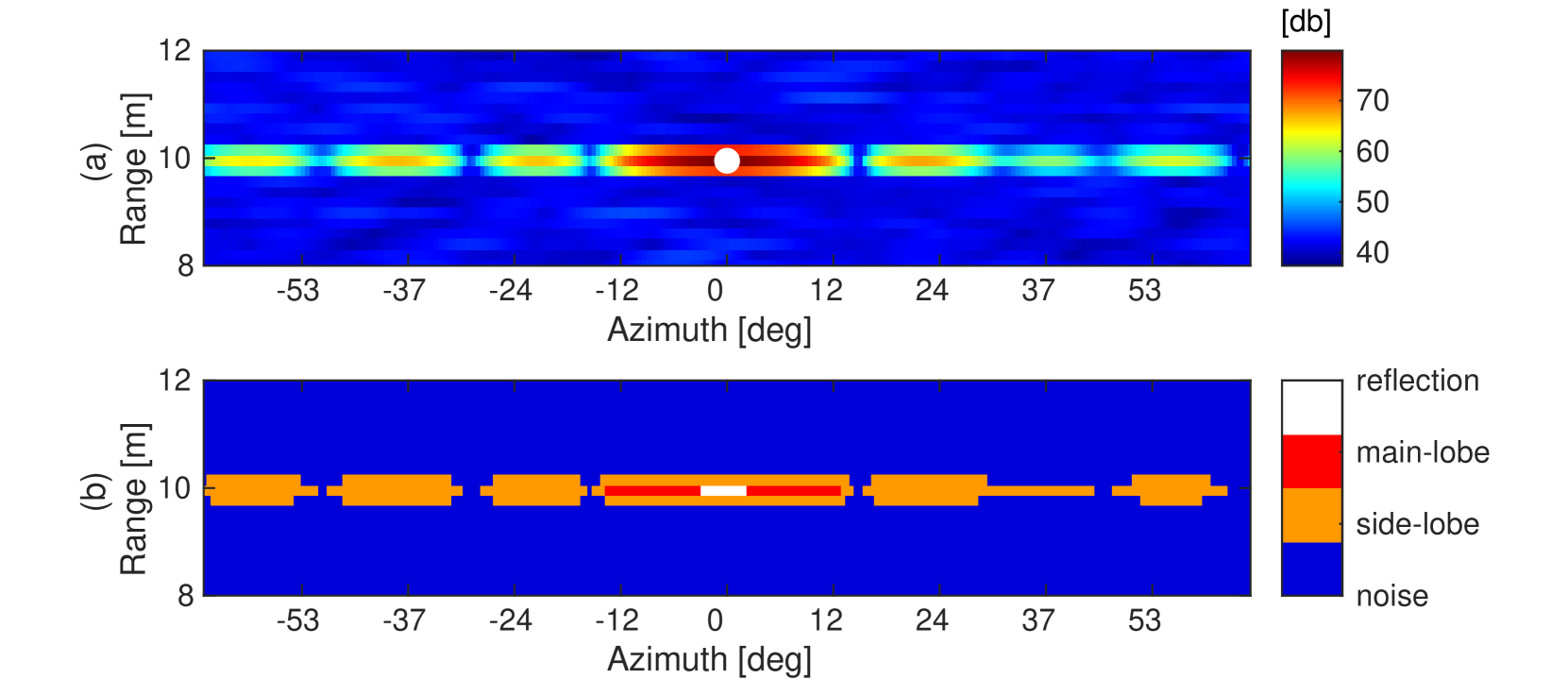
Automotive radars have an important role in autonomous driving systems. The main challenge in automotive radar detection is the radar's wide point spread function (PSF) in the angular domain that causes blurriness and clutter in the radar image. Numerous studies suggest employing an 'end-to-end' learning strategy using a Deep Neural Network (DNN) to directly detect objects from radar images. This approach implicitly addresses the PSF's impact on objects of interest. In this paper, we propose an alternative approach, which we term Boosting Radar Reflections (BoostRad). In BoostRad, a first DNN is trained to narrow the PSF for all the reflection points in the scene. The output of the first DNN is a boosted reflection image with higher resolution and reduced clutter, resulting in a sharper and cleaner image. Subsequently, a second DNN is employed to detect objects within the boosted reflection image. We develop a novel method for training the boosting DNN that incorporates domain knowledge of radar's PSF characteristics. BoostRad's performance is evaluated using the RADDet and CARRADA datasets, revealing its superiority over reference methods.
Create account to get full access
Overview
- Introduces BoostRad, a method for enhancing object detection by boosting radar reflections
- Leverages self-supervised learning to improve radar-based object detection
- Proposes a novel data augmentation technique to boost radar reflections
- Demonstrates improved object detection performance on real-world datasets
Plain English Explanation
The paper introduces a new technique called BoostRad that aims to improve the performance of object detection using radar sensors. Radar is a key sensor for autonomous vehicles and other robotic systems, but its detection accuracy can be limited, especially in challenging environments.
BoostRad uses a self-supervised learning approach to enhance the radar reflections of objects, making them easier for the detection system to identify. The key idea is to generate "boosted" radar data through a novel data augmentation technique, which can then be used to train the object detection model. This helps the model learn to better recognize objects based on their radar signatures.
The paper shows that BoostRad can lead to significant improvements in object detection accuracy on real-world datasets, outperforming previous radar-based approaches. This could be particularly valuable for applications like self-driving cars, where robust object detection is critical for safe navigation.
By boosting radar reflections, BoostRad effectively amplifies the radar signals of objects, making them stand out more clearly from the background. This addresses a key limitation of radar-based object detection, where weak or inconsistent reflections can cause objects to be missed or misidentified.
The self-supervised learning approach used in BoostRad is also notable, as it allows the system to learn and improve without the need for expensive, manually labeled training data. This bootstrapping aspect makes the technique more scalable and practical for real-world deployment.
Technical Explanation
The BoostRad method consists of three main components:
-
Radar Data Augmentation: The authors propose a novel data augmentation technique to generate "boosted" radar data. This involves applying various transformations to the raw radar data, such as adjusting the amplitude, phase, and frequency of the radar reflections, to create more distinctive object signatures.
-
Self-Supervised Learning: BoostRad uses a self-supervised learning approach to train the object detection model. The augmented radar data is used as the input, while the original, unmodified radar data serves as the target. This encourages the model to learn features that can enhance the radar reflections and improve object detection.
-
Object Detection Network: The authors integrate the BoostRad approach into a deep neural network architecture for radar-based object detection. The network takes the boosted radar data as input and produces bounding boxes and class labels for the detected objects.
The paper evaluates BoostRad on several real-world radar datasets, including the RadarDistill and RadarGhost datasets. The results show that BoostRad significantly outperforms baseline radar-only object detection methods, as well as approaches that combine radar with other sensor modalities, such as NeuRad and RadSimReal.
Critical Analysis
The authors acknowledge that BoostRad is primarily evaluated on static, pre-recorded radar datasets, and further research is needed to assess its performance in real-world, dynamic environments. Additionally, the data augmentation techniques used in BoostRad may not capture all the complexities and variations present in actual radar data, which could limit the generalization of the approach.
Another potential concern is the computational cost and complexity of the BoostRad pipeline. The data augmentation and self-supervised learning steps add additional processing overhead, which could be a challenge for deployment on resource-constrained autonomous systems.
Furthermore, the paper does not provide a detailed analysis of the types of objects and scenarios where BoostRad excels or struggles. Understanding these failure modes and edge cases would be crucial for real-world deployment and further improvements to the technique.
Conclusion
The BoostRad method presents a promising approach for enhancing radar-based object detection by leveraging self-supervised learning and a novel data augmentation technique. The demonstrated performance improvements on real-world datasets suggest that BoostRad could be a valuable tool for autonomous systems that rely on radar sensors, such as self-driving cars and robotics.
However, further research and validation in dynamic, real-world environments are needed to fully assess the capabilities and limitations of the BoostRad approach. Optimizing the computational efficiency and exploring the failure modes of the technique will also be important steps towards practical deployment.
Overall, the BoostRad paper introduces an innovative and impactful solution to a critical problem in autonomous systems, and the authors have made a valuable contribution to the field of radar-based object detection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Redefining Automotive Radar Imaging: A Domain-Informed 1D Deep Learning Approach for High-Resolution and Efficient Performance
Ruxin Zheng, Shunqiao Sun, Holger Caesar, Honglei Chen, Jian Li
0
0
Millimeter-wave (mmWave) radars are indispensable for perception tasks of autonomous vehicles, thanks to their resilience in challenging weather conditions. Yet, their deployment is often limited by insufficient spatial resolution for precise semantic scene interpretation. Classical super-resolution techniques adapted from optical imaging inadequately address the distinct characteristics of radar signal data. In response, our study redefines radar imaging super-resolution as a one-dimensional (1D) signal super-resolution spectra estimation problem by harnessing the radar signal processing domain knowledge, introducing innovative data normalization and a domain-informed signal-to-noise ratio (SNR)-guided loss function. Our tailored deep learning network for automotive radar imaging exhibits remarkable scalability, parameter efficiency and fast inference speed, alongside enhanced performance in terms of radar imaging quality and resolution. Extensive testing confirms that our SR-SPECNet sets a new benchmark in producing high-resolution radar range-azimuth images, outperforming existing methods across varied antenna configurations and dataset sizes. Source code and new radar dataset will be made publicly available online.
6/12/2024

A Deep Automotive Radar Detector using the RaDelft Dataset
Ignacio Roldan, Andras Palffy, Julian F. P. Kooij, Dariu M. Gavrila, Francesco Fioranelli, Alexander Yarovoy
0
0
The detection of multiple extended targets in complex environments using high-resolution automotive radar is considered. A data-driven approach is proposed where unlabeled synchronized lidar data is used as ground truth to train a neural network with only radar data as input. To this end, the novel, large-scale, real-life, and multi-sensor RaDelft dataset has been recorded using a demonstrator vehicle in different locations in the city of Delft. The dataset, as well as the documentation and example code, is publicly available for those researchers in the field of automotive radar or machine perception. The proposed data-driven detector is able to generate lidar-like point clouds using only radar data from a high-resolution system, which preserves the shape and size of extended targets. The results are compared against conventional CFAR detectors as well as variations of the method to emulate the available approaches in the literature, using the probability of detection, the probability of false alarm, and the Chamfer distance as performance metrics. Moreover, an ablation study was carried out to assess the impact of Doppler and temporal information on detection performance. The proposed method outperforms the different baselines in terms of Chamfer distance, achieving a reduction of 75% against conventional CFAR detectors and 10% against the modified state-of-the-art deep learning-based approaches.
6/28/2024
Bootstrapping Autonomous Driving Radars with Self-Supervised Learning
Yiduo Hao, Sohrab Madani, Junfeng Guan, Mohammed Alloulah, Saurabh Gupta, Haitham Hassanieh
0
0
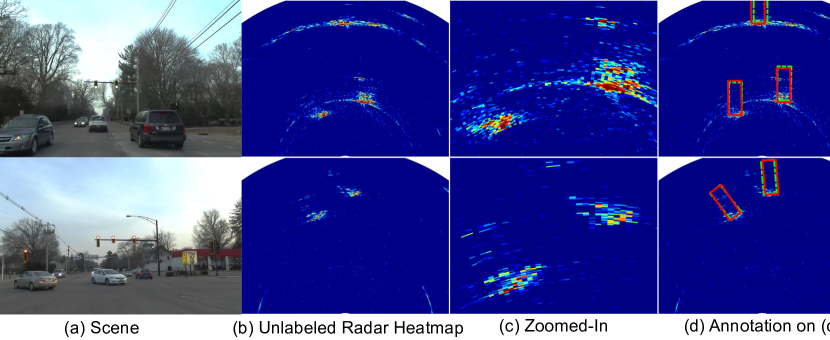
The perception of autonomous vehicles using radars has attracted increased research interest due its ability to operate in fog and bad weather. However, training radar models is hindered by the cost and difficulty of annotating large-scale radar data. To overcome this bottleneck, we propose a self-supervised learning framework to leverage the large amount of unlabeled radar data to pre-train radar-only embeddings for self-driving perception tasks. The proposed method combines radar-to-radar and radar-to-vision contrastive losses to learn a general representation from unlabeled radar heatmaps paired with their corresponding camera images. When used for downstream object detection, we demonstrate that the proposed self-supervision framework can improve the accuracy of state-of-the-art supervised baselines by $5.8%$ in mAP. Code is available at url{https://github.com/yiduohao/Radical}.
4/19/2024
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
0
0
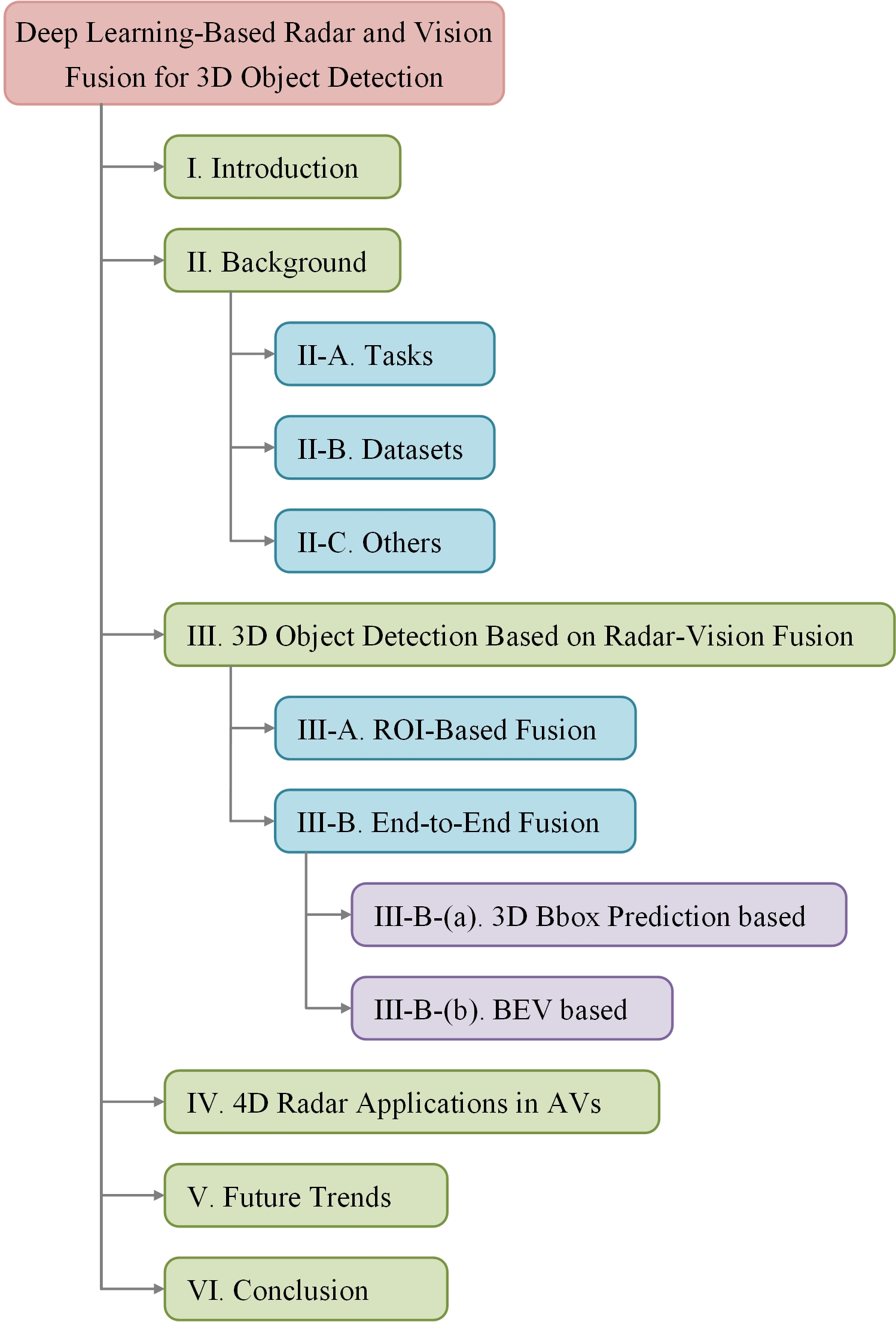
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
6/4/2024