Redefining Automotive Radar Imaging: A Domain-Informed 1D Deep Learning Approach for High-Resolution and Efficient Performance
2406.07399
0
0

Abstract
Millimeter-wave (mmWave) radars are indispensable for perception tasks of autonomous vehicles, thanks to their resilience in challenging weather conditions. Yet, their deployment is often limited by insufficient spatial resolution for precise semantic scene interpretation. Classical super-resolution techniques adapted from optical imaging inadequately address the distinct characteristics of radar signal data. In response, our study redefines radar imaging super-resolution as a one-dimensional (1D) signal super-resolution spectra estimation problem by harnessing the radar signal processing domain knowledge, introducing innovative data normalization and a domain-informed signal-to-noise ratio (SNR)-guided loss function. Our tailored deep learning network for automotive radar imaging exhibits remarkable scalability, parameter efficiency and fast inference speed, alongside enhanced performance in terms of radar imaging quality and resolution. Extensive testing confirms that our SR-SPECNet sets a new benchmark in producing high-resolution radar range-azimuth images, outperforming existing methods across varied antenna configurations and dataset sizes. Source code and new radar dataset will be made publicly available online.
Create account to get full access
Overview
- This paper proposes a novel 1D deep learning approach for high-resolution and efficient automotive radar imaging.
- The approach leverages domain-specific knowledge to enhance the performance of radar perception tasks such as object detection and classification.
- The authors demonstrate the effectiveness of their method on various automotive radar datasets, showcasing significant improvements over existing techniques.
Plain English Explanation
Automotive radar systems are an important technology for enabling advanced driver assistance features and autonomous driving capabilities in modern vehicles. However, traditional radar imaging techniques can struggle to provide the high-resolution and efficient performance required for these applications.
To address this challenge, the researchers in this paper have developed a new deep learning approach that takes advantage of domain-specific knowledge about automotive radar. Rather than using a standard 2D convolutional neural network, their method operates directly on the 1D radar signal data, allowing it to better capture the underlying physics and characteristics of the radar system.
By incorporating this domain knowledge, the researchers were able to create a more efficient and high-performing radar imaging model. In their experiments, they showed that their approach outperformed existing techniques on a variety of automotive radar datasets, including tasks like object detection and classification.
This work represents an important step forward in enhancing radar perception capabilities for autonomous vehicles, which could ultimately lead to safer and more reliable self-driving technologies.
Technical Explanation
The core innovation of this paper is the use of a 1D deep learning architecture that is specifically designed to work with automotive radar data. Rather than treating the radar signal as a 2D image and using a standard convolutional neural network, the authors propose a custom network that operates directly on the 1D time-domain radar waveform.
This 1D approach allows the model to better capture the underlying physical characteristics of the radar system, such as the relationship between the transmitted signal and the received echoes. The authors incorporate domain-specific knowledge about radar signal processing and target detection into the network architecture and training process, enabling the model to learn more efficient and effective representations for the task at hand.
Experiments on several automotive radar datasets demonstrate the effectiveness of this domain-informed 1D deep learning approach. The authors show significant improvements over existing 2D-based methods in terms of both object detection accuracy and computational efficiency. They attribute these gains to the ability of their 1D network to better exploit the inherent structure and properties of radar data.
Critical Analysis
One potential limitation of this work is the reliance on specific automotive radar datasets for evaluating the performance of the proposed method. While the authors demonstrate impressive results on these benchmarks, it would be valuable to see how the 1D deep learning approach generalizes to a wider range of radar sensing scenarios, including those with different operating frequencies, sensor configurations, or target environments.
Additionally, the paper does not provide a detailed analysis of the computational and memory requirements of the 1D network compared to 2D-based alternatives. Understanding the tradeoffs in terms of inference speed, model size, and energy consumption would be important for assessing the practical deployability of this approach in real-world autonomous vehicle systems.
Finally, the authors mention that their method could potentially be extended to other radar-based perception tasks, such as 3D point cloud reconstruction or cross-modal sensor fusion. Exploring these directions in future work could further demonstrate the versatility and broader applicability of the proposed 1D deep learning architecture for automotive radar imaging.
Conclusion
This paper presents a novel 1D deep learning approach for high-resolution and efficient automotive radar imaging. By incorporating domain-specific knowledge about radar signal processing, the authors have developed a specialized neural network architecture that outperforms traditional 2D-based methods on a range of radar perception tasks.
The key innovation of this work is the use of a 1D network structure that can better capture the inherent properties of radar data, leading to improved object detection accuracy and computational efficiency. This represents an important advancement in enhancing the capabilities of automotive radar systems, which are crucial for enabling safer and more reliable autonomous driving technologies.
While the paper demonstrates promising results on existing datasets, further research is needed to explore the generalizability of the 1D deep learning approach and its practical deployment in real-world autonomous vehicle applications. Nonetheless, this work provides a valuable contribution to the ongoing efforts in the field of radar-based perception for self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Diffusion-Based Point Cloud Super-Resolution for mmWave Radar Data
Kai Luan, Chenghao Shi, Neng Wang, Yuwei Cheng, Huimin Lu, Xieyuanli Chen
0
0
The millimeter-wave radar sensor maintains stable performance under adverse environmental conditions, making it a promising solution for all-weather perception tasks, such as outdoor mobile robotics. However, the radar point clouds are relatively sparse and contain massive ghost points, which greatly limits the development of mmWave radar technology. In this paper, we propose a novel point cloud super-resolution approach for 3D mmWave radar data, named Radar-diffusion. Our approach employs the diffusion model defined by mean-reverting stochastic differential equations(SDE). Using our proposed new objective function with supervision from corresponding LiDAR point clouds, our approach efficiently handles radar ghost points and enhances the sparse mmWave radar point clouds to dense LiDAR-like point clouds. We evaluate our approach on two different datasets, and the experimental results show that our method outperforms the state-of-the-art baseline methods in 3D radar super-resolution tasks. Furthermore, we demonstrate that our enhanced radar point cloud is capable of downstream radar point-based registration tasks.
4/10/2024

Sparse Multi-baseline SAR Cross-modal 3D Reconstruction of Vehicle Targets
Da Li, Guoqiang Zhao, Houjun Sun, Jiacheng Bao
0
0
Multi-baseline SAR 3D imaging faces significant challenges due to data sparsity. In recent years, deep learning techniques have achieved notable success in enhancing the quality of sparse SAR 3D imaging. However, previous work typically rely on full-aperture high-resolution radar images to supervise the training of deep neural networks (DNNs), utilizing only single-modal information from radar data. Consequently, imaging performance is limited, and acquiring full-aperture data for multi-baseline SAR is costly and sometimes impractical in real-world applications. In this paper, we propose a Cross-Modal Reconstruction Network (CMR-Net), which integrates differentiable render and cross-modal supervision with optical images to reconstruct highly sparse multi-baseline SAR 3D images of vehicle targets into visually structured and high-resolution images. We meticulously designed the network architecture and training strategies to enhance network generalization capability. Remarkably, CMR-Net, trained solely on simulated data, demonstrates high-resolution reconstruction capabilities on both publicly available simulation datasets and real measured datasets, outperforming traditional sparse reconstruction algorithms based on compressed sensing and other learning-based methods. Additionally, using optical images as supervision provides a cost-effective way to build training datasets, reducing the difficulty of method dissemination. Our work showcases the broad prospects of deep learning in multi-baseline SAR 3D imaging and offers a novel path for researching radar imaging based on cross-modal learning theory.
6/7/2024
BoostRad: Enhancing Object Detection by Boosting Radar Reflections
Yuval Haitman, Oded Bialer
0
0
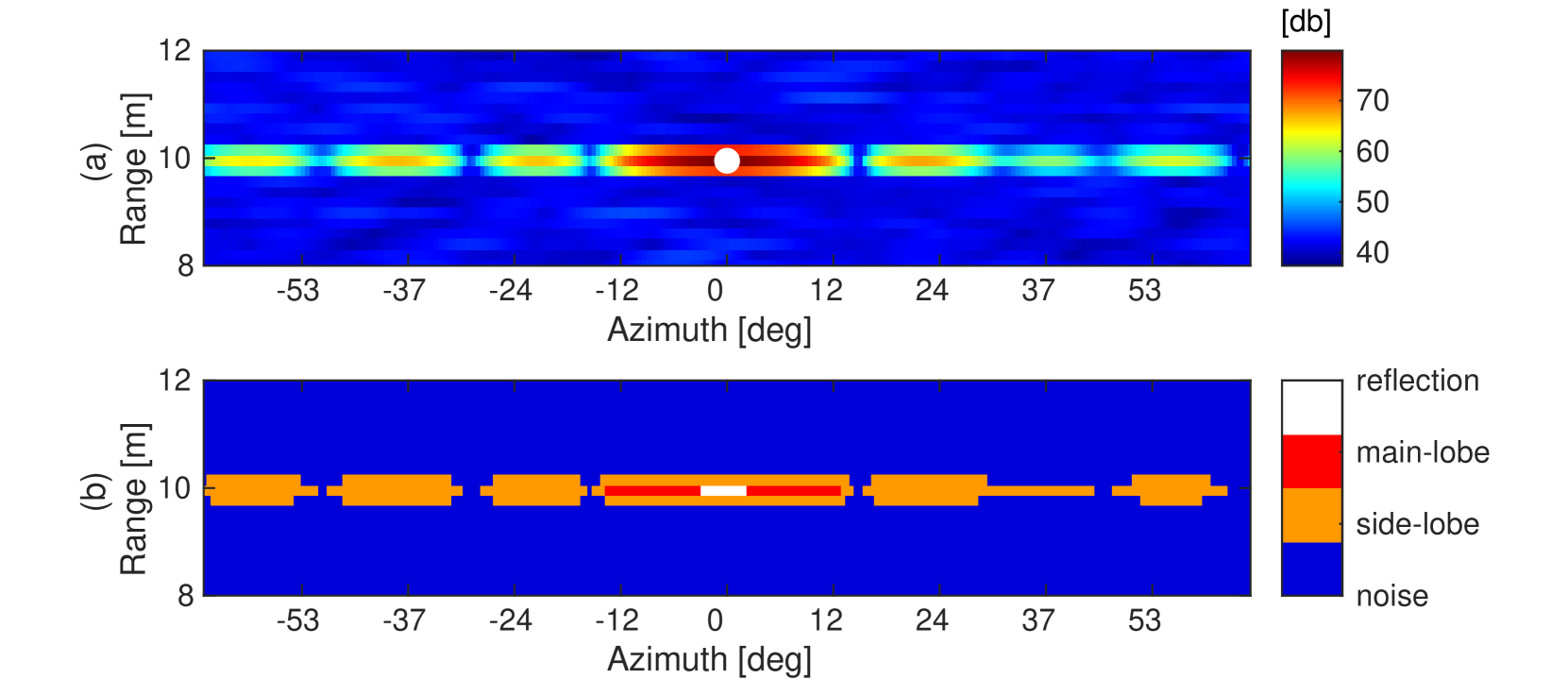
Automotive radars have an important role in autonomous driving systems. The main challenge in automotive radar detection is the radar's wide point spread function (PSF) in the angular domain that causes blurriness and clutter in the radar image. Numerous studies suggest employing an 'end-to-end' learning strategy using a Deep Neural Network (DNN) to directly detect objects from radar images. This approach implicitly addresses the PSF's impact on objects of interest. In this paper, we propose an alternative approach, which we term Boosting Radar Reflections (BoostRad). In BoostRad, a first DNN is trained to narrow the PSF for all the reflection points in the scene. The output of the first DNN is a boosted reflection image with higher resolution and reduced clutter, resulting in a sharper and cleaner image. Subsequently, a second DNN is employed to detect objects within the boosted reflection image. We develop a novel method for training the boosting DNN that incorporates domain knowledge of radar's PSF characteristics. BoostRad's performance is evaluated using the RADDet and CARRADA datasets, revealing its superiority over reference methods.
4/30/2024
Enabling Visual Recognition at Radio Frequency
Haowen Lai, Gaoxiang Luo, Yifei Liu, Mingmin Zhao
0
0
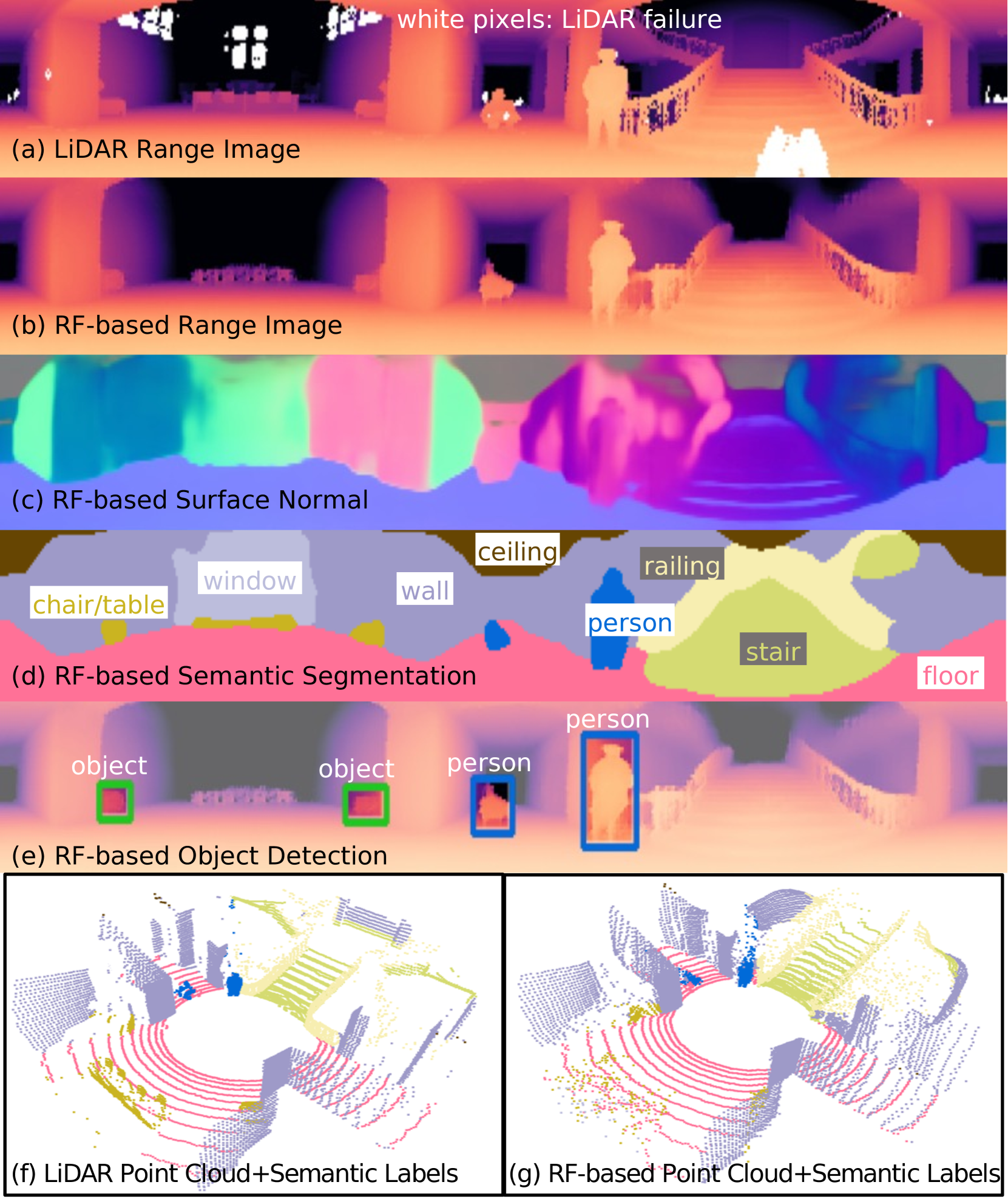
This paper introduces PanoRadar, a novel RF imaging system that brings RF resolution close to that of LiDAR, while providing resilience against conditions challenging for optical signals. Our LiDAR-comparable 3D imaging results enable, for the first time, a variety of visual recognition tasks at radio frequency, including surface normal estimation, semantic segmentation, and object detection. PanoRadar utilizes a rotating single-chip mmWave radar, along with a combination of novel signal processing and machine learning algorithms, to create high-resolution 3D images of the surroundings. Our system accurately estimates robot motion, allowing for coherent imaging through a dense grid of synthetic antennas. It also exploits the high azimuth resolution to enhance elevation resolution using learning-based methods. Furthermore, PanoRadar tackles 3D learning via 2D convolutions and addresses challenges due to the unique characteristics of RF signals. Our results demonstrate PanoRadar's robust performance across 12 buildings.
5/31/2024