RadSimReal: Bridging the Gap Between Synthetic and Real Data in Radar Object Detection With Simulation
2404.18150
0
0
Abstract
Object detection in radar imagery with neural networks shows great potential for improving autonomous driving. However, obtaining annotated datasets from real radar images, crucial for training these networks, is challenging, especially in scenarios with long-range detection and adverse weather and lighting conditions where radar performance excels. To address this challenge, we present RadSimReal, an innovative physical radar simulation capable of generating synthetic radar images with accompanying annotations for various radar types and environmental conditions, all without the need for real data collection. Remarkably, our findings demonstrate that training object detection models on RadSimReal data and subsequently evaluating them on real-world data produce performance levels comparable to models trained and tested on real data from the same dataset, and even achieves better performance when testing across different real datasets. RadSimReal offers advantages over other physical radar simulations that it does not necessitate knowledge of the radar design details, which are often not disclosed by radar suppliers, and has faster run-time. This innovative tool has the potential to advance the development of computer vision algorithms for radar-based autonomous driving applications.
Create account to get full access
Overview
- This paper presents a novel approach called RadSimReal to bridge the gap between synthetic and real data in radar object detection.
- The authors aim to improve the performance of radar object detection models by leveraging a simulation-based data generation pipeline that can realistically mimic real-world radar data.
- The paper explores techniques to make the simulated radar data more similar to real-world data, including modeling radar sensor physics, environmental effects, and object interactions.
Plain English Explanation
The researchers in this paper are working on improving how well computer vision models can detect objects using radar data. Radar is a technology that uses radio waves to detect and locate objects, and it's commonly used in self-driving cars and other autonomous systems. However, training these radar detection models often requires a large amount of real-world radar data, which can be challenging and expensive to collect.
To address this, the researchers developed a new approach called RadSimReal that can generate synthetic radar data that is very similar to real-world data. By modeling the physics of radar sensors, the environment, and how objects interact with the radar waves, they are able to create simulated radar data that looks and behaves just like the real thing. <a href="https://aimodels.fyi/papers/arxiv/rasim-range-aware-high-fidelity-rgb-d">This is similar to techniques used in other simulation-based data generation approaches</a>, but the authors have focused specifically on the unique characteristics of radar data.
The goal is that by training radar detection models on this high-quality synthetic data, they can achieve performance on par with models trained on expensive real-world data. This could make it much easier and cheaper to develop robust radar-based perception systems for self-driving cars, drones, and other autonomous applications. <a href="https://aimodels.fyi/papers/arxiv/are-nerfs-ready-autonomous-driving-towards-closing">The authors note that this is an important step towards closing the sim-to-real gap for autonomous driving</a> and <a href="https://aimodels.fyi/papers/arxiv/exploring-generative-ai-sim2real-driving-data-synthesis">complement other work on using generative models to synthesize driving data</a>.
Technical Explanation
The core of the RadSimReal approach is a simulation pipeline that can generate high-fidelity radar data. This involves modeling the physics of radar sensors, including factors like antenna patterns, frequency-dependent attenuation, and channel interference. The authors also model environmental effects like weather, terrain, and clutter, as well as the complex interactions between radar waves and different types of objects.
By carefully simulating all of these factors, the authors are able to produce synthetic radar data that exhibits the same statistical properties and artifacts as real-world radar data. This includes things like radar ghosts, multipath reflections, and occlusions - phenomena that can be challenging to capture in simpler radar simulation approaches. <a href="https://aimodels.fyi/papers/arxiv/radar-ghost-dataset-evaluation-ghost-objects-automotive">The authors build on prior work on modeling radar ghosts</a> to ensure their synthetic data is realistic in this regard.
The authors evaluate their RadSimReal approach by training object detection models on the synthetic data and testing on real-world radar datasets. They show that models trained solely on the synthetic data can achieve performance on par with models trained on a mix of real and synthetic data, demonstrating the fidelity of their simulation. <a href="https://aimodels.fyi/papers/arxiv/paved2paradise-cost-effective-scalable-lidar-simulation-by">This builds on broader research into using simulation to generate high-quality training data for perception tasks</a>.
Critical Analysis
The authors do a thorough job of addressing potential limitations of their approach. They acknowledge that while their simulation can capture many important radar phenomena, it may still lack some of the nuance and unpredictability of real-world radar data. There may be additional environmental factors or sensor imperfections that are difficult to model precisely.
Additionally, the authors note that their evaluation was limited to a small set of object detection benchmarks. The transferability of their synthetic data to other radar-based perception tasks, such as tracking or classification, remains an open question that requires further investigation.
One area that could benefit from more discussion is the computational cost and scalability of the RadSimReal pipeline. Producing high-fidelity simulated radar data can be resource-intensive, and the authors do not provide many details on the practical considerations around deploying such a system for large-scale data generation.
Overall, however, the RadSimReal approach represents a promising step towards bridging the gap between synthetic and real radar data. By continuing to refine the simulation techniques and exploring their application to a broader range of perception tasks, the authors have the potential to significantly accelerate the development of robust, radar-based autonomous systems.
Conclusion
This paper presents a novel simulation-based approach called RadSimReal that can generate synthetic radar data with unprecedented realism. By carefully modeling the physics of radar sensors, the environment, and object interactions, the authors are able to produce simulated data that closely matches the statistical properties and artifacts of real-world radar measurements.
The key innovation of RadSimReal is its ability to capture the full complexity of radar data, including phenomena like ghosts, multipath reflections, and occlusions. This allows the synthetic data to be used for training object detection models that can achieve performance on par with models trained on real-world data, without the high cost and effort of data collection.
The authors demonstrate the effectiveness of their approach through extensive evaluation, and they also acknowledge some of the remaining challenges and limitations that warrant further research. Overall, RadSimReal represents an important contribution towards closing the sim-to-real gap in radar-based perception, with the potential to significantly accelerate the development of advanced autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications
Xingyu Liu, Chenyangguang Zhang, Gu Wang, Ruida Zhang, Xiangyang Ji
0
0
In robotic vision, a de-facto paradigm is to learn in simulated environments and then transfer to real-world applications, which poses an essential challenge in bridging the sim-to-real domain gap. While mainstream works tackle this problem in the RGB domain, we focus on depth data synthesis and develop a range-aware RGB-D data simulation pipeline (RaSim). In particular, high-fidelity depth data is generated by imitating the imaging principle of real-world sensors. A range-aware rendering strategy is further introduced to enrich data diversity. Extensive experiments show that models trained with RaSim can be directly applied to real-world scenarios without any finetuning and excel at downstream RGB-D perception tasks.
4/8/2024

Are NeRFs ready for autonomous driving? Towards closing the real-to-simulation gap
Carl Lindstrom, Georg Hess, Adam Lilja, Maryam Fatemi, Lars Hammarstrand, Christoffer Petersson, Lennart Svensson
0
0
Neural Radiance Fields (NeRFs) have emerged as promising tools for advancing autonomous driving (AD) research, offering scalable closed-loop simulation and data augmentation capabilities. However, to trust the results achieved in simulation, one needs to ensure that AD systems perceive real and rendered data in the same way. Although the performance of rendering methods is increasing, many scenarios will remain inherently challenging to reconstruct faithfully. To this end, we propose a novel perspective for addressing the real-to-simulated data gap. Rather than solely focusing on improving rendering fidelity, we explore simple yet effective methods to enhance perception model robustness to NeRF artifacts without compromising performance on real data. Moreover, we conduct the first large-scale investigation into the real-to-simulated data gap in an AD setting using a state-of-the-art neural rendering technique. Specifically, we evaluate object detectors and an online mapping model on real and simulated data, and study the effects of different fine-tuning strategies.Our results show notable improvements in model robustness to simulated data, even improving real-world performance in some cases. Last, we delve into the correlation between the real-to-simulated gap and image reconstruction metrics, identifying FID and LPIPS as strong indicators. See https://research.zenseact.com/publications/closing-real2sim-gap for our project page.
4/16/2024
📊
Synthetic Data Generation for Bridging Sim2Real Gap in a Production Environment
Parth Rawal, Mrunal Sompura, Wolfgang Hintze
0
0
Synthetic data is being used lately for training deep neural networks in computer vision applications such as object detection, object segmentation and 6D object pose estimation. Domain randomization hereby plays an important role in reducing the simulation to reality gap. However, this generalization might not be effective in specialized domains like a production environment involving complex assemblies. Either the individual parts, trained with synthetic images, are integrated in much larger assemblies making them indistinguishable from their counterparts and result in false positives or are partially occluded just enough to give rise to false negatives. Domain knowledge is vital in these cases and if conceived effectively while generating synthetic data, can show a considerable improvement in bridging the simulation to reality gap. This paper focuses on synthetic data generation procedures for parts and assemblies used in a production environment. The basic procedures for synthetic data generation and their various combinations are evaluated and compared on images captured in a production environment, where results show up to 15% improvement using combinations of basic procedures. Reducing the simulation to reality gap in this way can aid to utilize the true potential of robot assisted production using artificial intelligence.
5/13/2024
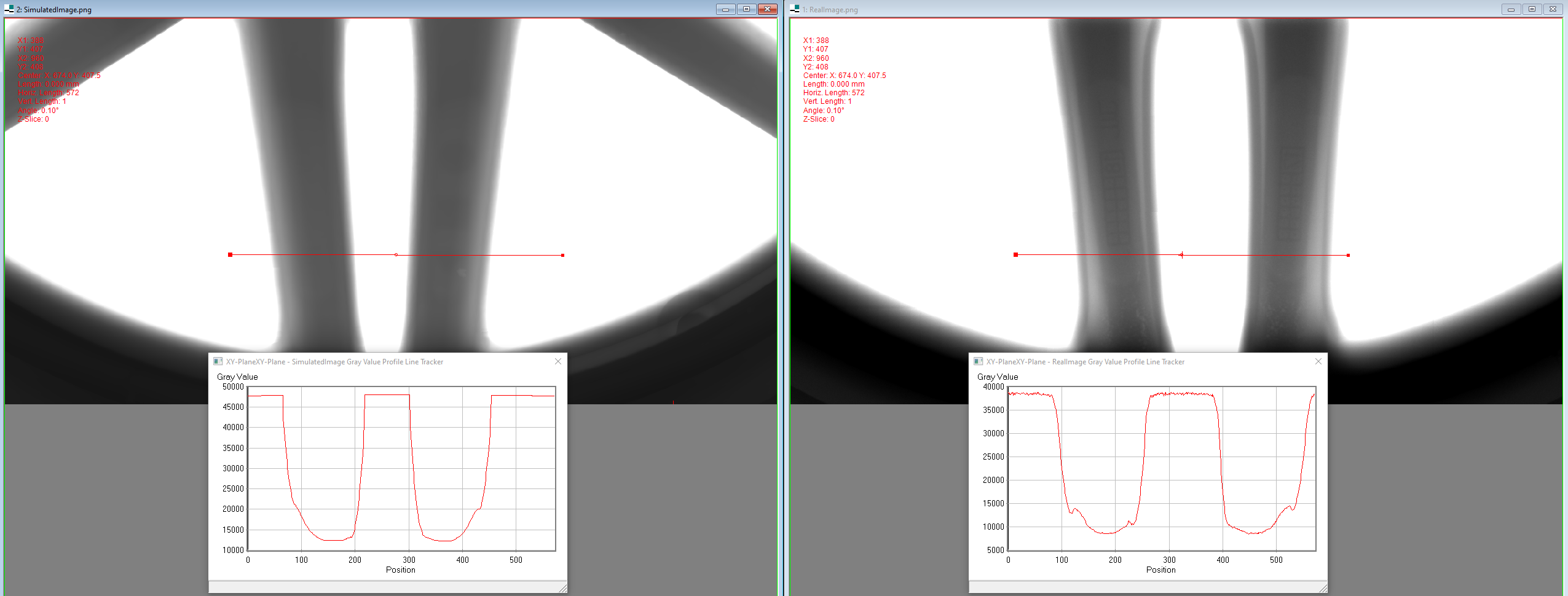
New!Towards Reducing Data Acquisition and Labeling for Defect Detection using Simulated Data
Lukas Malte Kemeter, Rasmus Hvingelby, Paulina Sierak, Tobias Schon, Bishwajit Gosswam
0
0
In many manufacturing settings, annotating data for machine learning and computer vision is costly, but synthetic data can be generated at significantly lower cost. Substituting the real-world data with synthetic data is therefore appealing for many machine learning applications that require large amounts of training data. However, relying solely on synthetic data is frequently inadequate for effectively training models that perform well on real-world data, primarily due to domain shifts between the synthetic and real-world data. We discuss approaches for dealing with such a domain shift when detecting defects in X-ray scans of aluminium wheels. Using both simulated and real-world X-ray images, we train an object detection model with different strategies to identify the training approach that generates the best detection results while minimising the demand for annotated real-world training samples. Our preliminary findings suggest that the sim-2-real domain adaptation approach is more cost-efficient than a fully supervised oracle - if the total number of available annotated samples is fixed. Given a certain number of labeled real-world samples, training on a mix of synthetic and unlabeled real-world data achieved comparable or even better detection results at significantly lower cost. We argue that future research into the cost-efficiency of different training strategies is important for a better understanding of how to allocate budget in applied machine learning projects.
6/28/2024