Can LVLMs Obtain a Driver's License? A Benchmark Towards Reliable AGI for Autonomous Driving

10

Sign in to get full access
Overview
- This paper explores whether large vision-language models (LVLMs) can obtain a driver's license, which would be a significant step towards reliable artificial general intelligence (AGI) for autonomous driving.
- The authors develop a comprehensive benchmark to evaluate the driving capabilities of LVLMs, including tasks such as understanding traffic rules, visual reasoning, and safety-critical decision making.
- The findings from this research could have important implications for the development of safe and reliable autonomous driving systems powered by advanced AI.
Plain English Explanation
The researchers in this paper are trying to find out if large language models that can understand both images and text (known as LVLMs) are capable of passing a driving test. This would be an important milestone in developing artificial general intelligence (AGI) that can reliably handle the complex task of autonomous driving.
To test the driving abilities of these LVLMs, the researchers created a comprehensive benchmark that includes various tasks like understanding traffic rules, reasoning about visual scenes, and making safety-critical decisions. By evaluating how well the LVLMs perform on this benchmark, the researchers can assess whether these models are ready to obtain a virtual "driver's license" and potentially be used in real-world autonomous vehicles.
The insights from this research could have significant implications for the development of safe and reliable autonomous driving systems. If LVLMs can demonstrate the necessary driving skills, it would be a major step forward in creating AGI that can handle the complex challenges of autonomous driving.
Technical Explanation
The paper begins by discussing the potential of large vision-language models (LVLMs) to serve as the foundation for artificial general intelligence (AGI) capable of autonomous driving. However, the authors note that the driving capabilities of these models have not been thoroughly evaluated.
To address this, the researchers develop a comprehensive Driving Capability Benchmark (DCB) that assesses an LVLM's understanding of traffic rules, visual reasoning skills, and safety-critical decision making. The DCB includes tasks such as:
- Traffic Rule Understanding: Evaluating the model's knowledge of traffic laws and its ability to reason about driving scenarios.
- Visual Reasoning: Assessing the model's capacity to understand and reason about complex visual scenes relevant to driving.
- Safety-Critical Decision Making: Testing the model's ability to make responsible decisions in safety-critical situations.
The authors then conduct experiments to evaluate the performance of several prominent LVLMs on the DCB. The results provide insights into the current capabilities and limitations of these models with respect to autonomous driving.
Critical Analysis
The paper acknowledges several limitations and areas for further research. For example, the authors note that the DCB may not capture the full complexity of real-world driving, and that additional tasks and scenarios may be needed to comprehensively evaluate an LVLM's driving capabilities.
Additionally, the paper does not address the potential safety and ethical concerns that would need to be addressed before deploying LVLMs in autonomous vehicles. Issues such as algorithm transparency, bias, and accountability would need to be carefully considered.
Further research is also needed to investigate the generalization capabilities of LVLMs and their ability to transfer driving knowledge to novel situations. The current benchmark may not be sufficient to assess the model's robustness and reliability in unpredictable real-world conditions.
Conclusion
This paper presents a significant step towards evaluating the driving capabilities of large vision-language models (LVLMs), which could serve as the foundation for artificial general intelligence (AGI) capable of autonomous driving. The comprehensive Driving Capability Benchmark (DCB) developed by the researchers provides a valuable tool for assessing the current state of these models and identifying areas for improvement.
The findings from this work could have important implications for the development of safe and reliable autonomous driving systems. If LVLMs can demonstrate the necessary driving skills, it would be a major milestone towards the realization of AGI for autonomous vehicles. However, further research and careful consideration of safety and ethical concerns are still required before these models can be deployed in real-world driving scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
10
Can LVLMs Obtain a Driver's License? A Benchmark Towards Reliable AGI for Autonomous Driving
Yuhang Lu, Yichen Yao, Jiadong Tu, Jiangnan Shao, Yuexin Ma, Xinge Zhu
Large Vision-Language Models (LVLMs) have recently garnered significant attention, with many efforts aimed at harnessing their general knowledge to enhance the interpretability and robustness of autonomous driving models. However, LVLMs typically rely on large, general-purpose datasets and lack the specialized expertise required for professional and safe driving. Existing vision-language driving datasets focus primarily on scene understanding and decision-making, without providing explicit guidance on traffic rules and driving skills, which are critical aspects directly related to driving safety. To bridge this gap, we propose IDKB, a large-scale dataset containing over one million data items collected from various countries, including driving handbooks, theory test data, and simulated road test data. Much like the process of obtaining a driver's license, IDKB encompasses nearly all the explicit knowledge needed for driving from theory to practice. In particular, we conducted comprehensive tests on 15 LVLMs using IDKB to assess their reliability in the context of autonomous driving and provided extensive analysis. We also fine-tuned popular models, achieving notable performance improvements, which further validate the significance of our dataset. The project page can be found at: url{https://4dvlab.github.io/project_page/idkb.html}
Read more9/5/2024
0
Automated Evaluation of Large Vision-Language Models on Self-driving Corner Cases
Kai Chen, Yanze Li, Wenhua Zhang, Yanxin Liu, Pengxiang Li, Ruiyuan Gao, Lanqing Hong, Meng Tian, Xinhai Zhao, Zhenguo Li, Dit-Yan Yeung, Huchuan Lu, Xu Jia
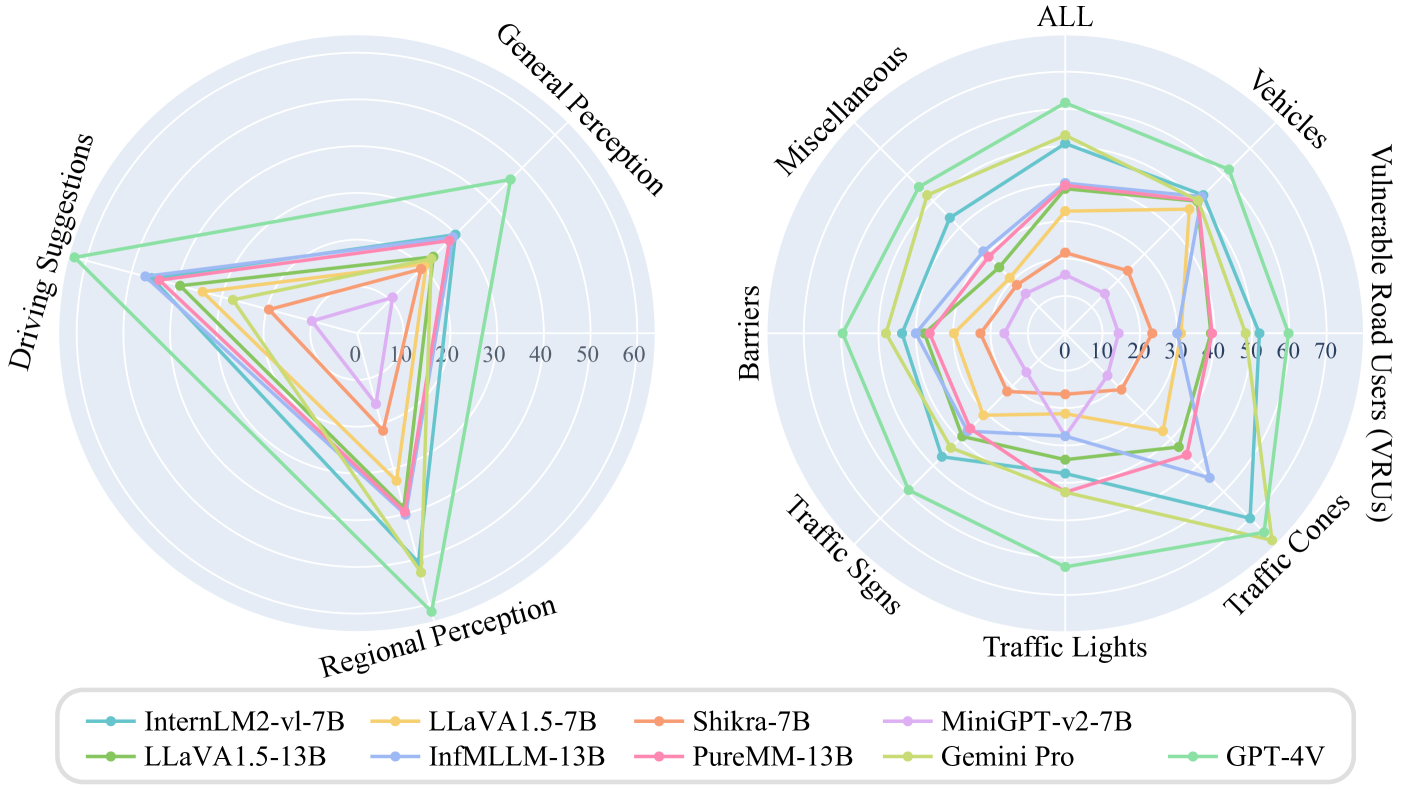
Large Vision-Language Models (LVLMs) have received widespread attention in advancing the interpretable self-driving. Existing evaluations of LVLMs primarily focus on the multi-faceted capabilities in natural circumstances, lacking automated and quantifiable assessment for self-driving, let alone the severe road corner cases. In this paper, we propose CODA-LM, the very first benchmark for the automatic evaluation of LVLMs for self-driving corner cases. We adopt a hierarchical data structure to prompt powerful LVLMs to analyze complex driving scenes and generate high-quality pre-annotation for human annotators, and for LVLM evaluation, we show that using the text-only large language models (LLMs) as judges reveals even better alignment with human preferences than the LVLM judges. Moreover, with CODA-LM, we build CODA-VLM, a new driving LVLM surpassing all the open-sourced counterparts on CODA-LM. Our CODA-VLM performs comparably with GPT-4V, even surpassing GPT-4V by +21.42% on the regional perception task. We hope CODA-LM can become the catalyst to promote interpretable self-driving empowered by LVLMs.
Read more6/28/2024
👁️
0
DriveVLM: The Convergence of Autonomous Driving and Large Vision-Language Models
Xiaoyu Tian, Junru Gu, Bailin Li, Yicheng Liu, Yang Wang, Zhiyong Zhao, Kun Zhan, Peng Jia, Xianpeng Lang, Hang Zhao
A primary hurdle of autonomous driving in urban environments is understanding complex and long-tail scenarios, such as challenging road conditions and delicate human behaviors. We introduce DriveVLM, an autonomous driving system leveraging Vision-Language Models (VLMs) for enhanced scene understanding and planning capabilities. DriveVLM integrates a unique combination of reasoning modules for scene description, scene analysis, and hierarchical planning. Furthermore, recognizing the limitations of VLMs in spatial reasoning and heavy computational requirements, we propose DriveVLM-Dual, a hybrid system that synergizes the strengths of DriveVLM with the traditional autonomous driving pipeline. Experiments on both the nuScenes dataset and our SUP-AD dataset demonstrate the efficacy of DriveVLM and DriveVLM-Dual in handling complex and unpredictable driving conditions. Finally, we deploy the DriveVLM-Dual on a production vehicle, verifying it is effective in real-world autonomous driving environments.
Read more6/26/2024
📊
0
DriveLM: Driving with Graph Visual Question Answering
Chonghao Sima, Katrin Renz, Kashyap Chitta, Li Chen, Hanxue Zhang, Chengen Xie, Jens Bei{ss}wenger, Ping Luo, Andreas Geiger, Hongyang Li
We study how vision-language models (VLMs) trained on web-scale data can be integrated into end-to-end driving systems to boost generalization and enable interactivity with human users. While recent approaches adapt VLMs to driving via single-round visual question answering (VQA), human drivers reason about decisions in multiple steps. Starting from the localization of key objects, humans estimate object interactions before taking actions. The key insight is that with our proposed task, Graph VQA, where we model graph-structured reasoning through perception, prediction and planning question-answer pairs, we obtain a suitable proxy task to mimic the human reasoning process. We instantiate datasets (DriveLM-Data) built upon nuScenes and CARLA, and propose a VLM-based baseline approach (DriveLM-Agent) for jointly performing Graph VQA and end-to-end driving. The experiments demonstrate that Graph VQA provides a simple, principled framework for reasoning about a driving scene, and DriveLM-Data provides a challenging benchmark for this task. Our DriveLM-Agent baseline performs end-to-end autonomous driving competitively in comparison to state-of-the-art driving-specific architectures. Notably, its benefits are pronounced when it is evaluated zero-shot on unseen objects or sensor configurations. We hope this work can be the starting point to shed new light on how to apply VLMs for autonomous driving. To facilitate future research, all code, data, and models are available to the public.
Read more7/18/2024